目录
[二、Scene entity 介绍](#二、Scene entity 介绍)
前言:
如果你想要在3d空间空间里面显示一些东西,比如文字,比如一些形状,而且想控制这些东西的显示时间,那么可以使用本文提到的方法。
一、安装foxglove消息包(ros1)
参考链接:Introduction | Foxglove Docs
sudo apt install ros-noetic-foxglove-msgs二、Scene entity 介绍
参考链接:3D | Foxglove Docs
一组基本形状(立方体、球体、文本、网格、线条等),用于显示从基本边界框到复杂的3D决策树或道路网络的任何内容。
Scene entity必须包装在SceneUpdate消息中。下面文档中Scene entity介绍的具体位置。
三、SceneUpdate介绍
参考连接: SceneUpdate | Foxglove Docs
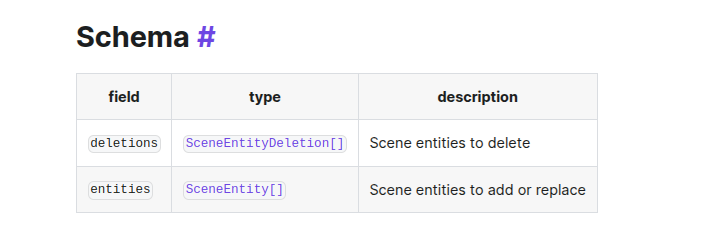
SceneUpdate的数据结构如下, 里面有两个属性,entities和deletions,其中entities是用来显示物体的,deletions使用来删除物体的。这里重点介绍entities,是一个SceneEntity的列表,代表SceneUpdate可以一下子显示多个物体。
四、实际的应用
参考连接:SceneEntity | Foxglove Docs
我想使用ros1在3d空间里面的某一个位置,显示一些文字。Scene entity的数据结构如下,显示一定的时间,我需要利用的是frame_id, life_time,texts。texts的数据结构如下面的第二幅截图。


五、代码解释
python
#!/usr/bin/env python
import rospy
from foxglove_msgs.msg import SceneUpdate, SceneEntity
from foxglove_msgs.msg import TextPrimitive # 导入 TextPrimitive
from rospy import Duration # 导入 Duration 用于设置生命周期
import time
def publish_text(text, publisher):
"""
发布包含指定文本的 SceneUpdate 消息
:param text: 要发布的文本信息
:param publisher: 消息发布者对象
"""
msg = SceneUpdate()
entity = SceneEntity()
text_primitive = TextPrimitive()
text_primitive.text = text
text_primitive.font_size = 1.0 # 设置字体大小
text_primitive.color.r = 1.0
text_primitive.color.g = 0.0
text_primitive.color.b = 0.0
text_primitive.color.a = 1.0 # 设置透明度
text_primitive.pose.position.x = 0.0
text_primitive.pose.position.y = 0.0
text_primitive.pose.position.z = 2.0 # 文本在 z 轴方向上保持不变
entity.texts.append(text_primitive)
entity.id = "text_entity"
entity.frame_id = "map"
if text:
# 设置文本显示 2 秒
entity.lifetime = Duration(2)
else:
# 清空文本时生命周期设为 0
entity.lifetime = Duration(0)
msg.entities.append(entity)
publisher.publish(msg)
# if text:
# rospy.loginfo(f'发布文本信息: {text}')
# else:
# rospy.loginfo('清空文本信息')
def main():
rospy.init_node('text_scene_update_publisher', anonymous=True)
# 创建发布者,发布 SceneUpdate 消息到 'text_scene_update_topic' 话题
publisher = rospy.Publisher('text_scene_update_topic', SceneUpdate, queue_size=10)
rate = rospy.Rate(0.5) # 每 2 秒执行一次循环
text_to_display = "您撞到墙上了!"
display_duration = 10
while not rospy.is_shutdown():
# 发布显示文本的消息
publish_text(text_to_display, publisher)
# 等待 2 秒
time.sleep(display_duration)
# 发布清空文本的消息
rate.sleep()
if __name__ == '__main__':
try:
main()
except rospy.ROSInterruptException:
pass六、实验结果
