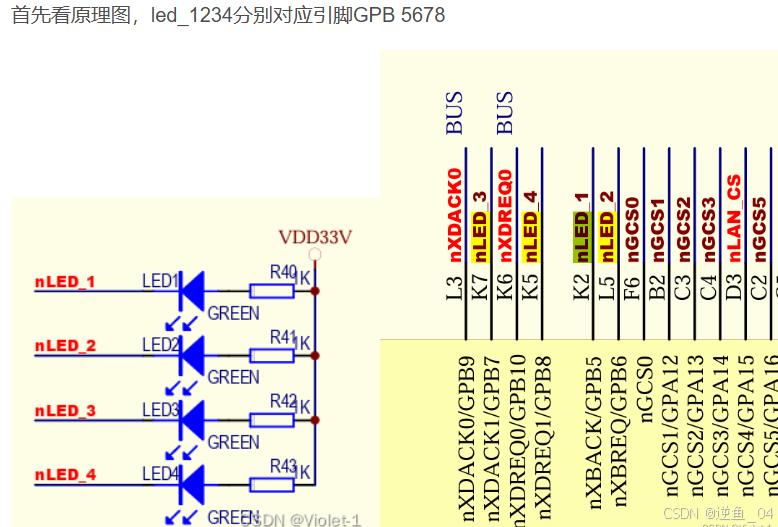
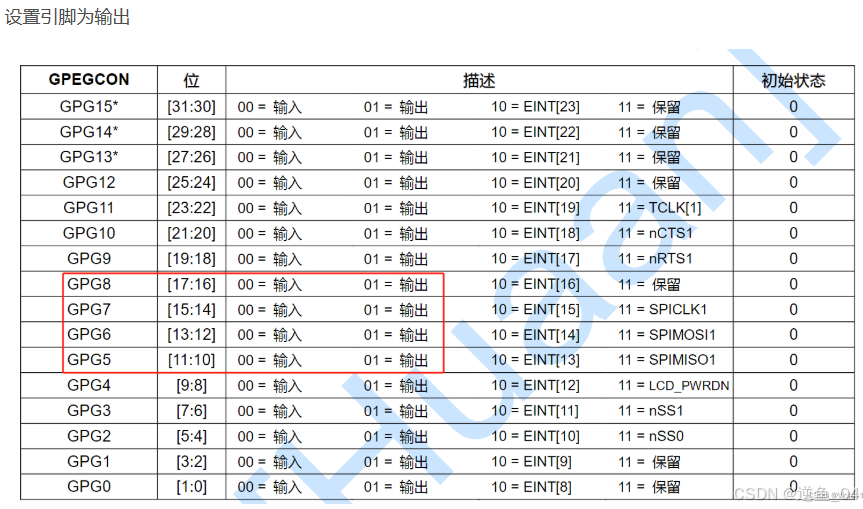
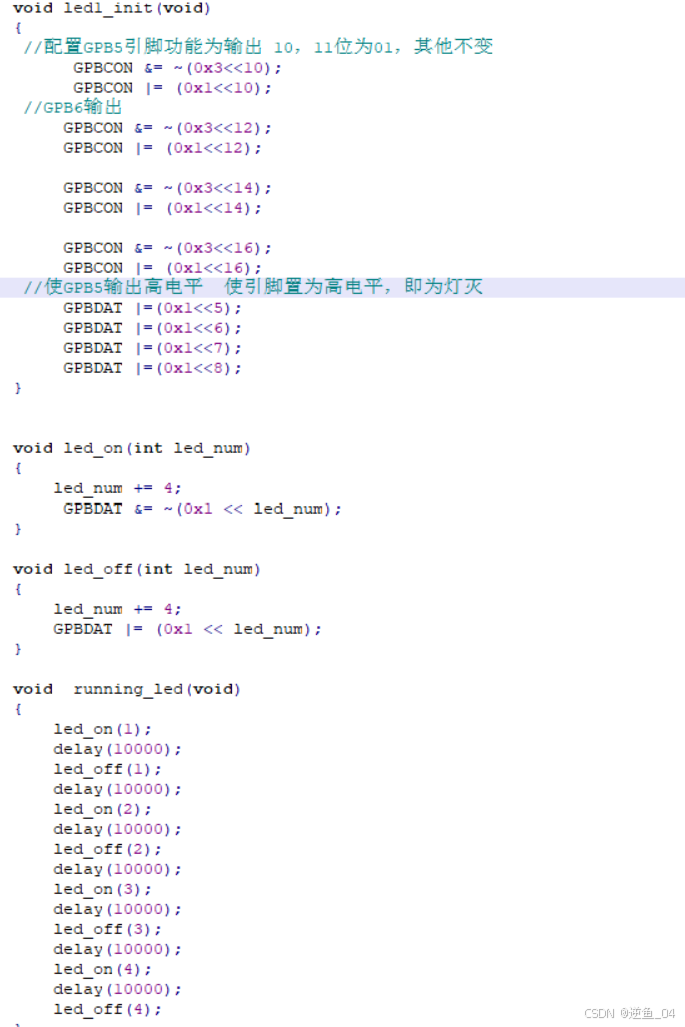
一.LED控制

二.关闭看门狗

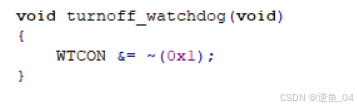
将1位置为0关闭看门狗
三.按钮

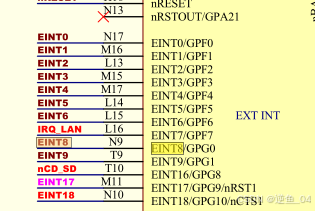
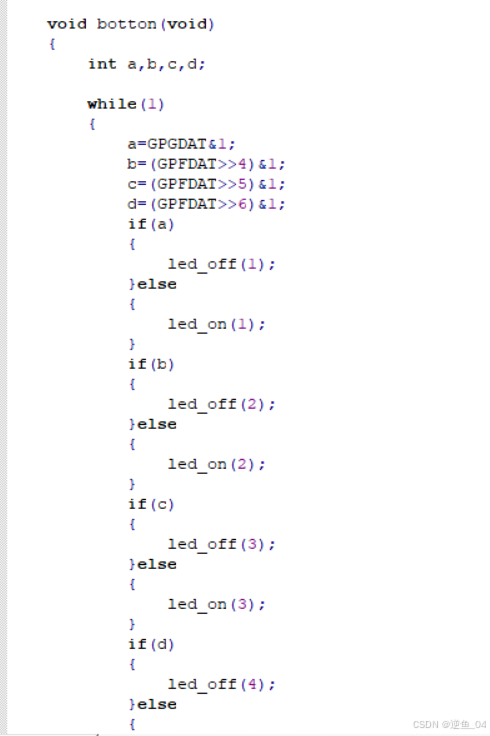
按钮未按为1,按下即为0
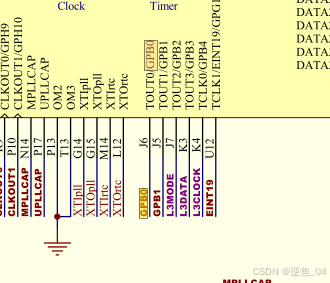
四,时钟
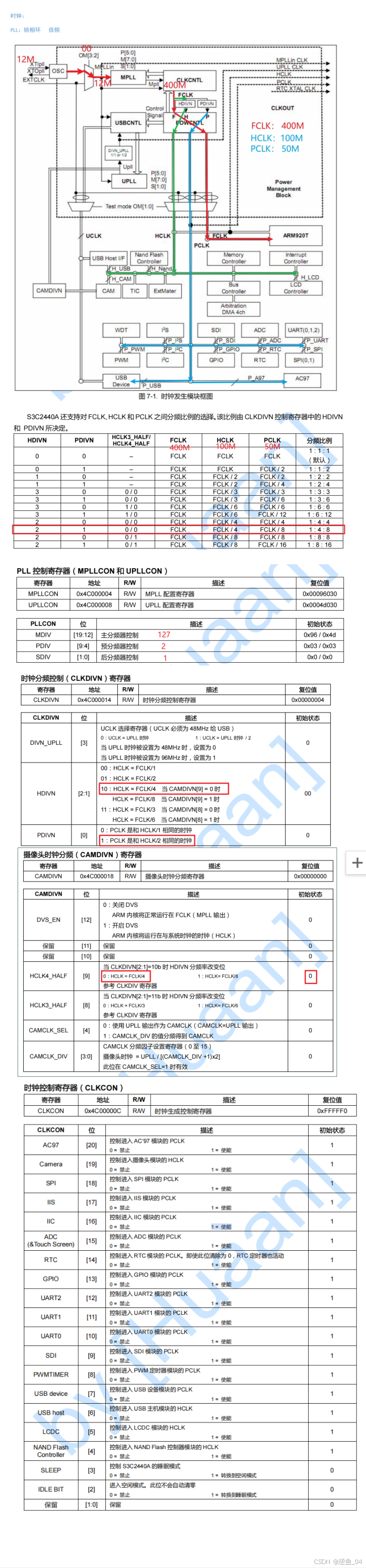
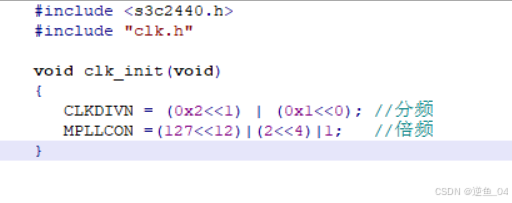
先分频后倍频,1:4:8比例
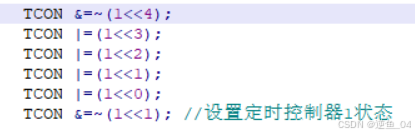
五.PWM定时器

设置为10模式
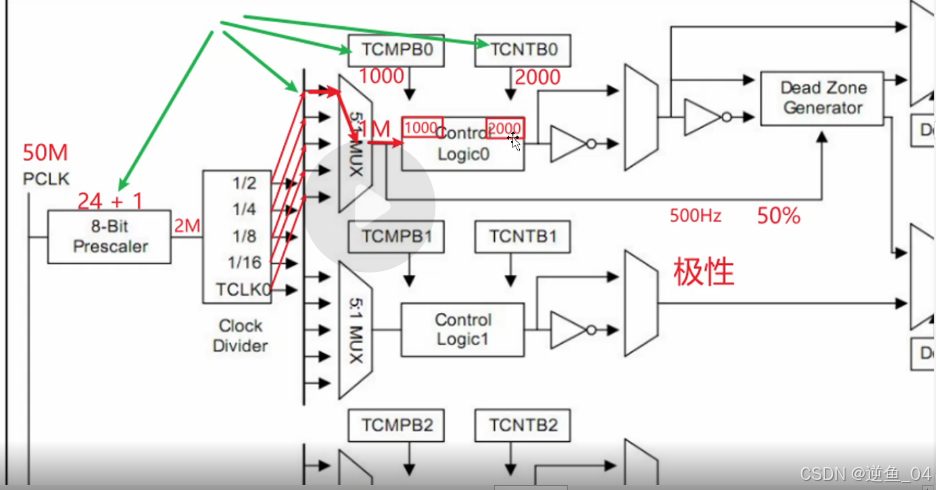
PCLK为固定的50M
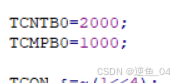
TCNTB0和TCMPB0为自己设置,当2000减为100时就翻转。
一个周期需要前面发送2000个信号,一个周期500hz,即前面频率为1M
50M通过分频为2M
所以选1/2
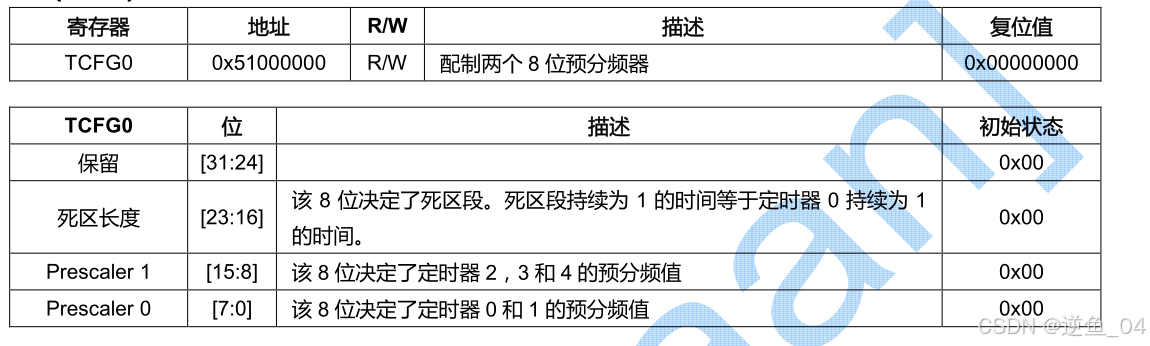


//设置定时器预分值为24
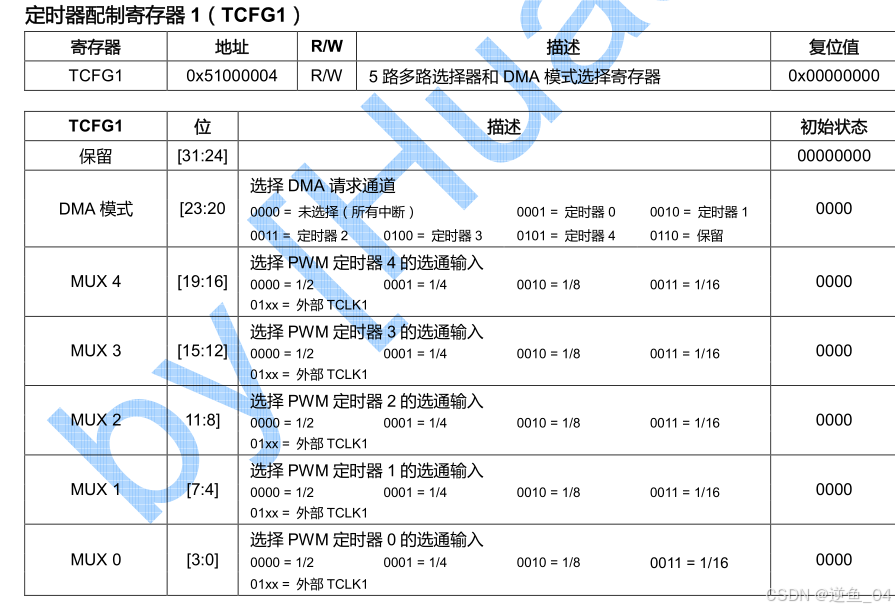
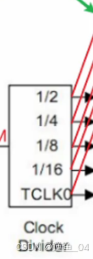

设置为1/2
自己设置的,控制占空比
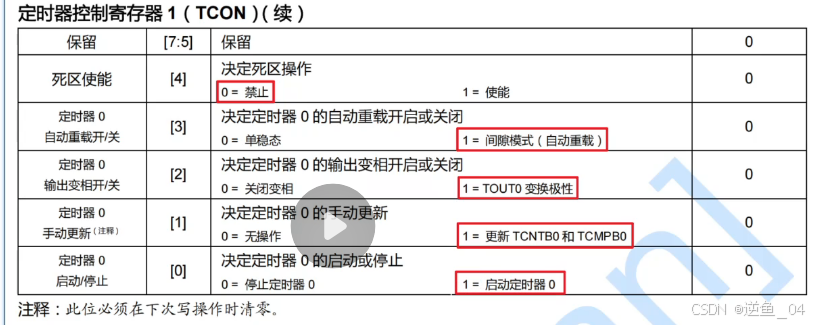
默认极性为低电平,结束就为高电平,一直工作,所以设置高电频
将1位置为0关闭看门狗
按钮未按为1,按下即为0
先分频后倍频,1:4:8比例
设置为10模式
PCLK为固定的50M
TCNTB0和TCMPB0为自己设置,当2000减为100时就翻转。
一个周期需要前面发送2000个信号,一个周期500hz,即前面频率为1M
50M通过分频为2M
所以选1/2
//设置定时器预分值为24
设置为1/2
自己设置的,控制占空比
默认极性为低电平,结束就为高电平,一直工作,所以设置高电频