第四章、Isaacsim在GUI中构建机器人(3):添加摄像头和传感器
0 前言
官方课程文档:https://docs.isaacsim.omniverse.nvidia.com/latest/gui/tutorial_intro_simple_objects.html
- 添加简单对象
- 组装一个简单的机器人
- 添加摄像头和传感器
本节将介绍如何向场景中添加相机,并通过菜单栏加一个viewport来实现相机视角的可视化,绑定相机与机器人,实现相机和机器人的同步移动。
1 添加摄像头
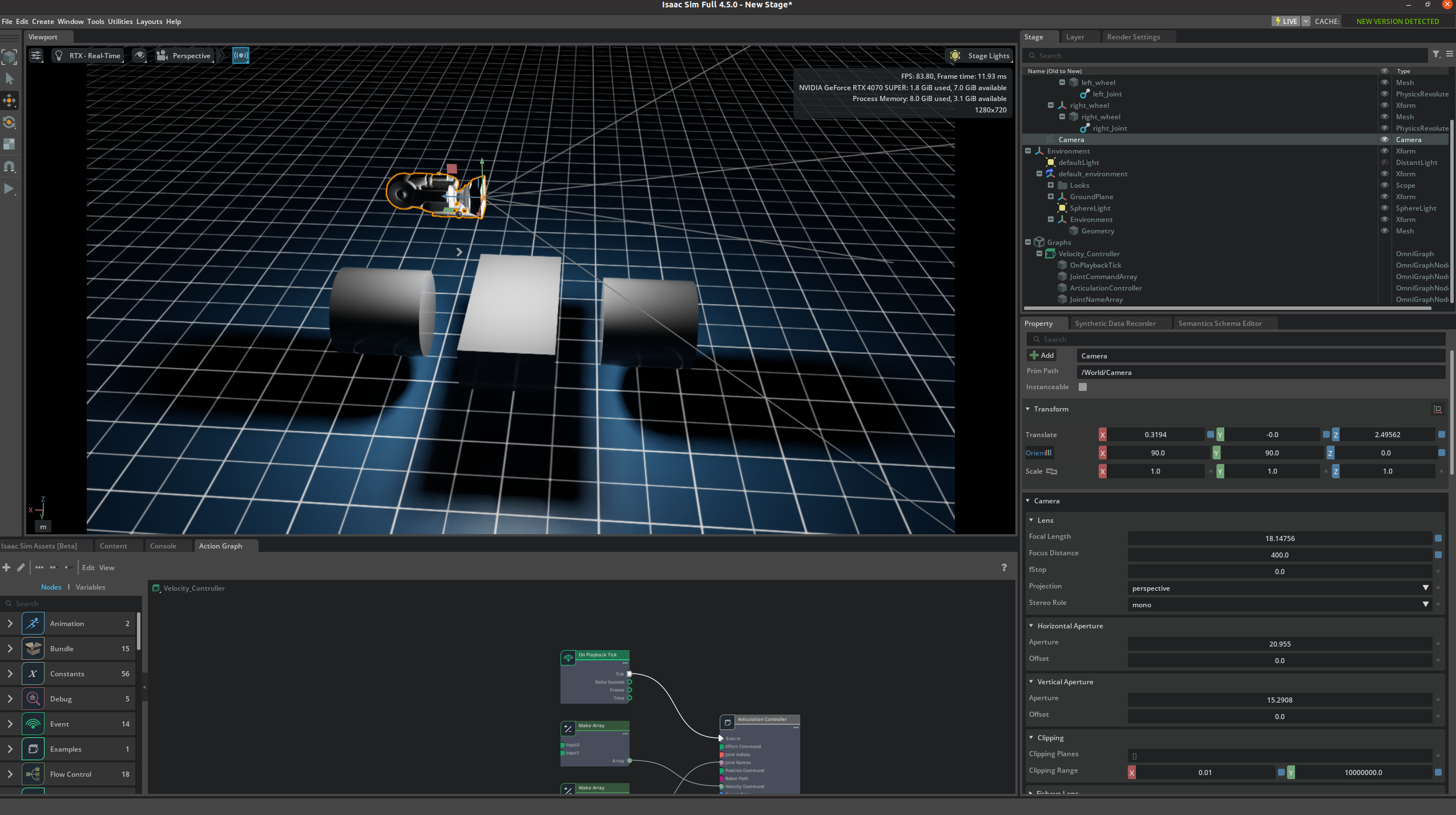
点击菜单栏Create > Camera,创建相机,相机和刚体一样可以移动。isaac sim中相机的默认坐标系如下所示:
| 方向 | 轴 |
|---|---|
| 向上 | +Y |
| 向前 | -Z |
2 检查相机
- 点击菜单栏中的
Tools > Robotics > Camera Inspector检查各个相机的参数 - 可以通过
Refresh查找新的摄像头
3 将摄像头安装到机器人上
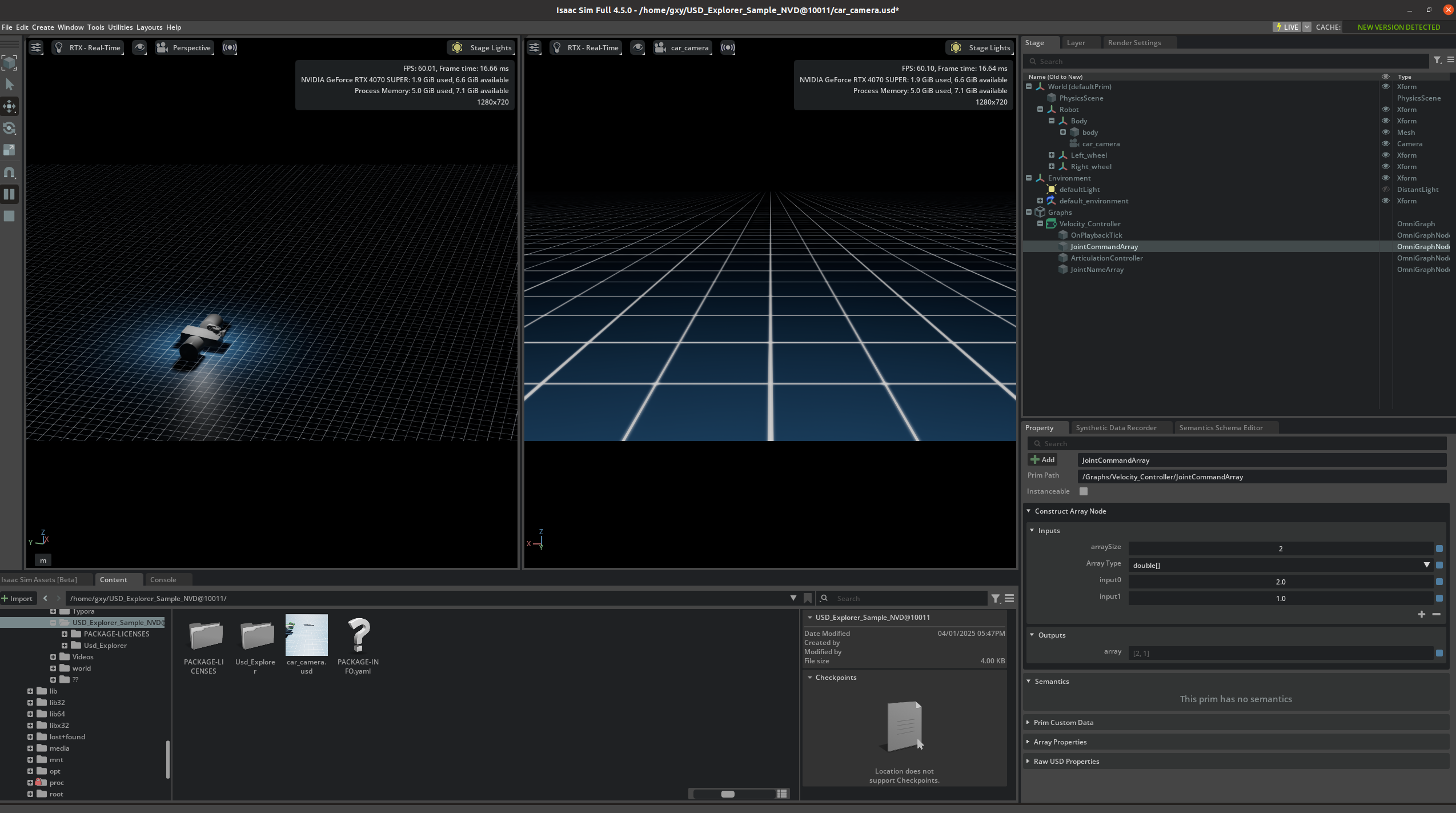
- 将摄像头重命名为
car_camera - 点击菜单栏中的
Window > Viewports > Viewport 2出现一个新视口,如下图所示

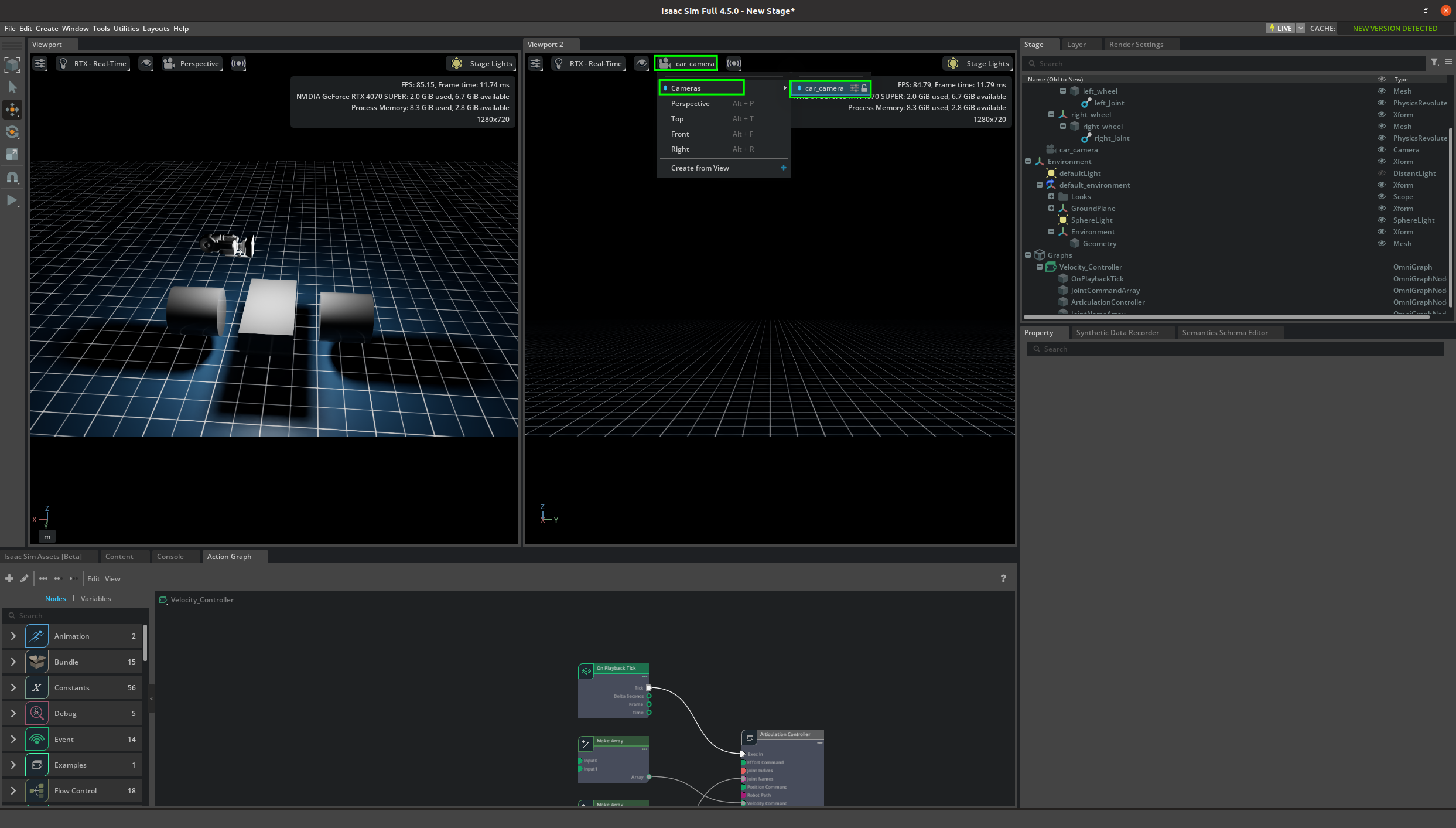
- 按上图分别点击,可以在第二个视图中显示相机的视图,可以在
Viewport1中调整相机位置看2中的变化 - 同时选择相机和body建立一个固定关节(fixed_joint)
- 修改你的相机到合适位置就可以看到相机跟着机器人移动。