接上期:
OpenCV基础------轮廓检测、模板匹配、图像均衡化-CSDN博客
一.傅里叶变换
在生活中绝大多数事情都和时间相关,以时间为参照分析这些事情可以粗略理解为是时域分析。而傅里叶变换更关心事情发生的频率,即频域分析~在频域中事物是相对静止的。当然这里不涉及非常深刻的傅里叶变化理论知识,重点在于图像学方面的应用~
1.滤波器
滤波的作用就是保留一部分内容,且排除一部分内容:
- 高频分量:变化剧烈的灰度分量,比如边界~
- 低频分量:变化缓慢的灰度分量,比如一片大海~
如下面这张图,队徽内容及边界就是高频分量,而周围雾蒙蒙的红色背景为低频分量:

滤波器的选择:
- 低频滤波器:只保留低频------图像会更加模糊
- 高频滤波器:只保留高频------图像细节增强~
2.频域转换
两个函数,cv2.dft()和cv2.idft(),分别是转换为频域及其逆向操作~
3.图像处理
输入图像必须转换为np.float32的格式:
python
import cv2
import numpy as np
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey(0)
cv2.destroyAllWindows()
img=cv2.imread('D:\\Bayern.jpg',0)
img_float=np.float32(img)转换为频域格式,并减低频域移动到中间的位置:
python
dft=cv2.dft(np.float32(img),flags=cv2.DFT_COMPLEX_OUTPUT)
dft_shift=np.fft.fftshift(dft)对图像通过进行转换,并通过公式完成映射:
python
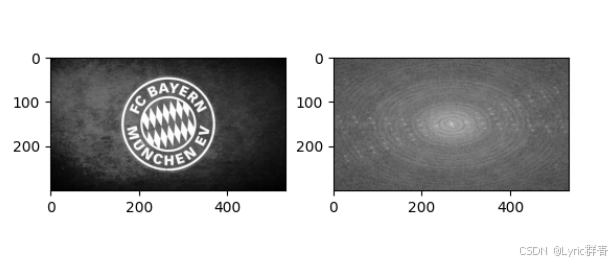
magnitude_spectrum=20*np.log(cv2.magnitude(dft_shift[:,:,0],dft_shift[:,:,1]))绘图:
python
plt.subplot(121),plt.imshow(img,cmap='gray')
plt.subplot(122),plt.imshow(magnitude_spectrum,cmap='gray')
plt.show()如下,越靠中间,频值越低:
4.掩膜
计算中心点位置,按照一定的长宽度勾画出来掩膜范围:
python
rows,cols=img_float.shape
crow,cool=int(rows/2),int(cols/2)5.低频
借助掩膜,黑色的都过滤掉,而白色的都留下~这里只将中间的部分设置为1,其余均为0~
python
mask=np.zeros((rows,cols,2),np.uint8)
mask[crow-30:crow+30,cool-30:cool+30]=1
fshift=dft_shift*mask
f_ishift=np.fft.ifftshift(fshift)
img_back=np.fft.ifft2(f_ishift)
img_back=cv2.magnitude(img_back[:,:,0],img_back[:,:,1])低频滤波的效果是将图片变得模糊起来~
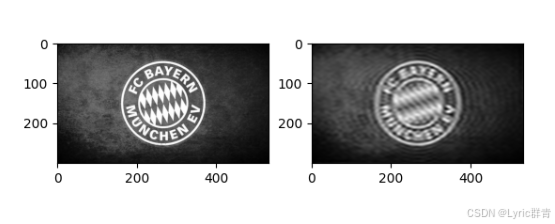
6.高频
反向,中间去掉,边缘保留,其余的部分一模一样:
python
mask=np.ones((rows,cols,2),np.uint8)
mask[crow-30:crow+30,cool-30:cool+30]=0只保留边界,中间部分的会模糊掉:

二.角点检测
在灰度图中,角点是指无论在水平方向还是垂直方向上,灰度级发生迅速变化的点位。
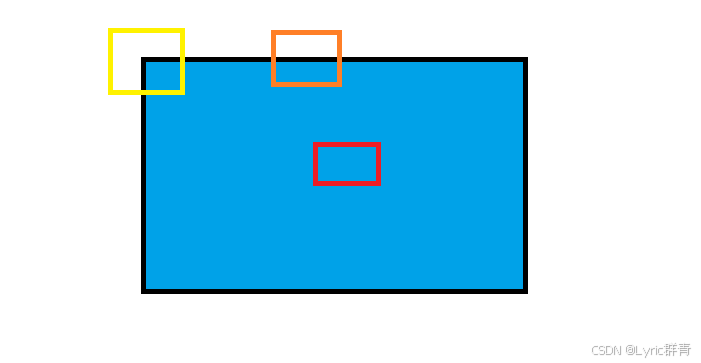
- 平面:上图红色边框,无论垂直还是水平移动均无明显灰度变化
- 边界:上图橙色边框,只在垂直一个方向上的变化较大
- 角点:上图黄色边框,无论垂直还是水平变化都很大
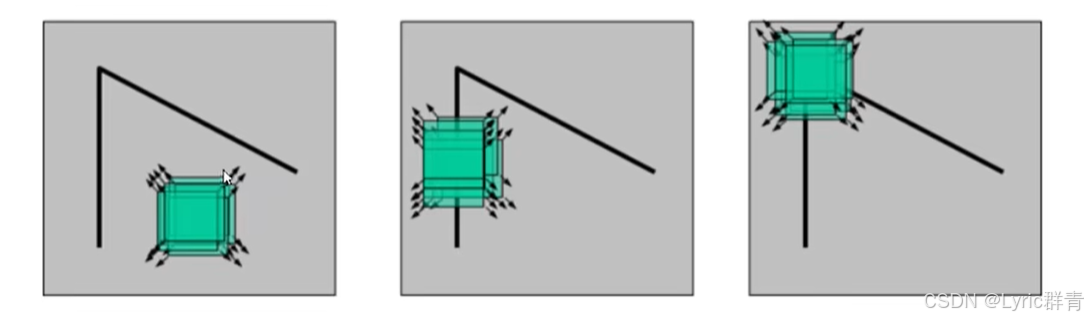
在移动的过程中,通过移动后某一区域的像素点减去移动前区域的像素点,也即自相似性。这里数学原理不详细归纳。首先将图片读取为灰度图,这里还是用之前的户型图:
python
import cv2
import numpy as np
def cv_show(img,name):
cv2.imshow(name,img)
cv2.waitKey(0)
cv2.destroyAllWindows()
img=cv2.imread('D:\\House.jpg')
gray=cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
print(img.shape)blockSize为角点检测中指定区域的大小,Ksize为sobel算子梯度检测时求偏导使用的窗口大小,k的取值为0.4或0.6都可以:
python
dst=cv2.cornerHarris(gray,3,5,0.04)
print(dst.shape)返回结果是每个点的自相似性:
在角点处用红色标记出来,这里判断是否为角点的公式要注意------即和自己图像中的最大值相比,并非所有图像都是某一固定值:
python
img[dst>0.01*dst.max()]=[0,0,255]
cv_show(img,"img")