目录
[2.1 光通信系统中的相位偏差问题](#2.1 光通信系统中的相位偏差问题)
[2.2 基于PI控制和卡尔曼滤波的相位偏差估计和补偿算法](#2.2 基于PI控制和卡尔曼滤波的相位偏差估计和补偿算法)
1.算法仿真效果
matlab2024b仿真结果如下**(完整代码运行后无水印)**:
16QAM测试



32QAM测试



64QAM测试



误码率对比

2.算法涉及理论知识概要
在光通信系统中,相位偏差是一个重要的问题,它会严重影响系统的性能,如降低信号的解调质量、增加误码率等。因此,准确地估计和补偿相位偏差对于光通信系统的稳定运行至关重要。PI(比例 - 积分)控制和卡尔曼滤波是两种常用的控制和估计方法,将它们结合起来可以有效地实现光通信相位偏差的估计和补偿。
2.1 光通信系统中的相位偏差问题
考虑一个简单的光通信系统,发送端的光信号可以表示为:
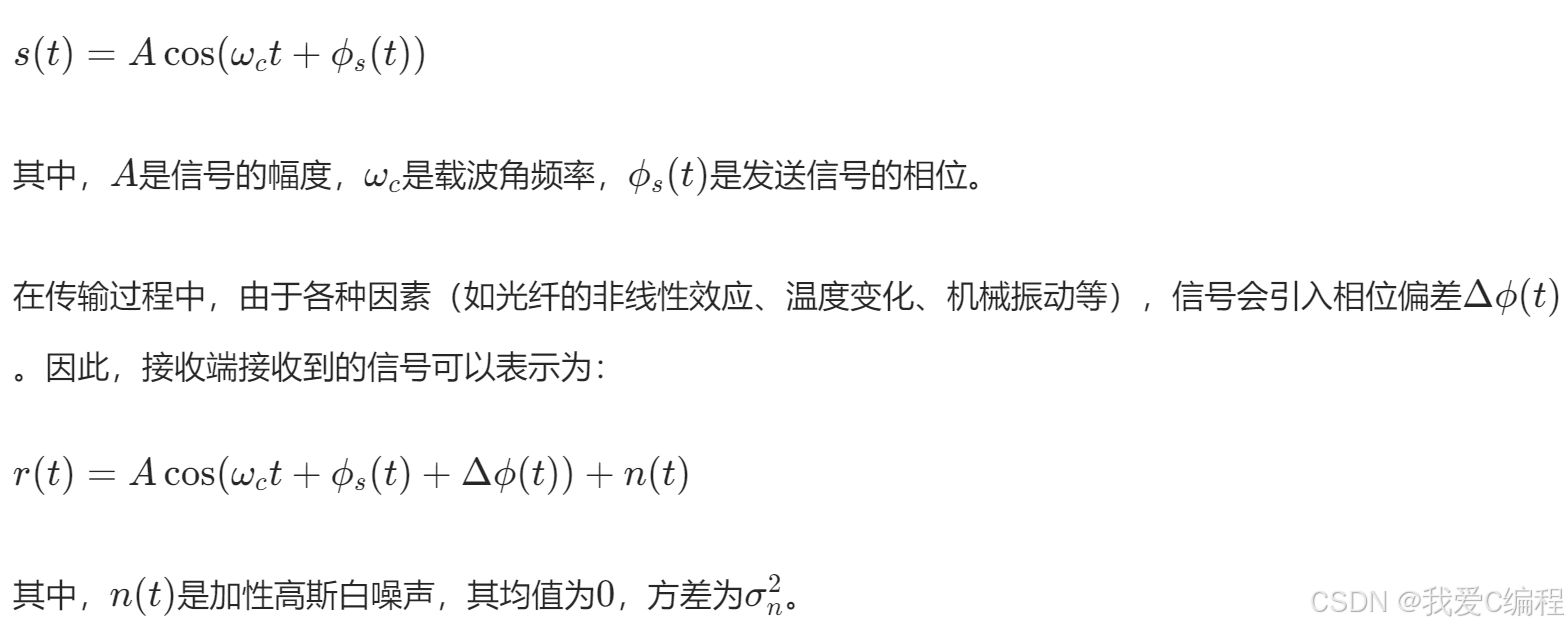
相位偏差会导致接收信号的相位发生变化,使得接收端的解调变得困难。在相干光通信系统中,相位偏差会破坏信号的相干性,导致误码率增加。相位偏差会使得判决区域发生偏移,从而增加误判的概率。
2.2 基于PI控制和卡尔曼滤波的相位偏差估计和补偿算法
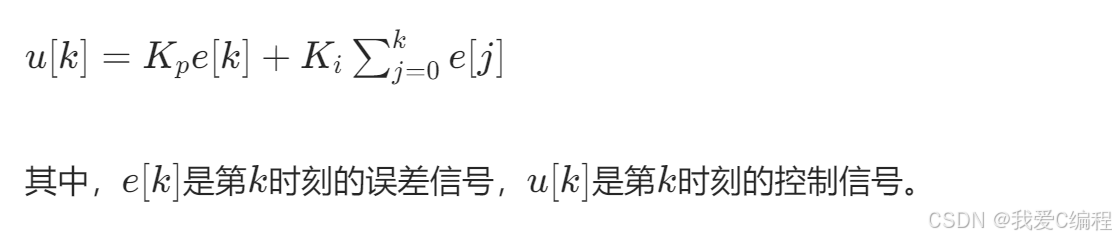
在光通信相位偏差补偿中,误差信号e(t)通常是估计的相位偏差与期望相位(通常为0)之间的差值。PI控制器根据误差信号计算控制信号u(t),该控制信号用于调整本地振荡器的相位,从而实现相位偏差的补偿。
对上述 PI控制公式进行离散化处理,得到离散形式的 PI 控制器:
将uk输入到卡尔曼滤波中:
卡尔曼滤波的递归算法包括预测和更新两个步骤。
预测步骤

更新步骤
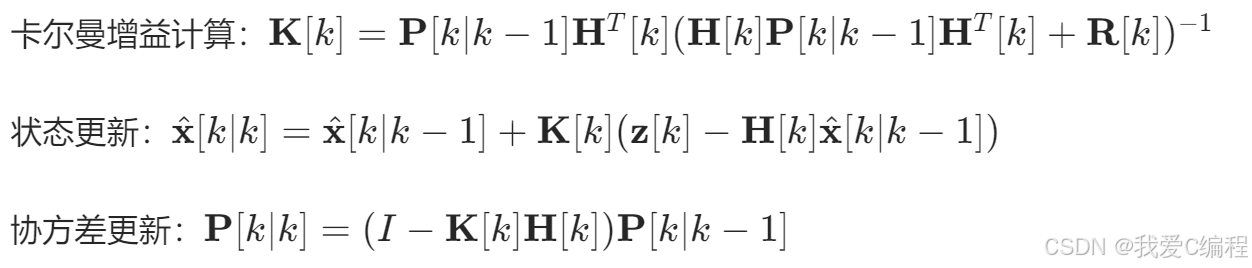
最后将将卡尔曼滤波输出信号应用于本地振荡器,调整其相位,实现相位偏差的补偿。
3.MATLAB核心程序
..............................................................
% 计算误码率
demod_signal_decision = qamdemod(synced_signal_decision, M);
% 计算决策反馈同步后的误码率
ber_decision = sum(demod_signal_decision ~= bits(1:N)) / length(bits(1:N));
% 绘制相位估计曲线
figure;
plot(t, Phase_est2, 'b', 'DisplayName', '卡尔曼相位估计');
xlabel('Time (s)');
ylabel('相位估计');
legend;
grid on;
figure;
plot(t, phase_error_decision, 'b', 'DisplayName', '卡尔曼相位估计误差');
xlabel('Time (s)');
ylabel('相位误差');
legend;
grid on;
% 绘制结果
% 绘制传输信号星座图
figure;
subplot(2, 2, 1);
plot(real(mod_signal), imag(mod_signal), 'b.');
title('发射端标准星座图');
xlabel('Real Part');
ylabel('Imaginary Part');
grid on;
axis equal;
% 绘制接收信号星座图
%
subplot(2, 2, 2);
plot(real(received_signal2), imag(received_signal2), 'b.');
xlabel('Real Part');
ylabel('Imaginary Part');
title('接收端相位噪声抑制前星座图');
grid on;
axis equal;
% 绘制卡尔曼滤波同步后信号星座图
subplot(2, 2, 3);
plot(real(synced_signal_kalman(80000:end)), imag(synced_signal_kalman(80000:end)), 'r.');
title('接收端相位噪声抑制后星座图');
xlabel('Real Part');
ylabel('Imaginary Part');
grid on;
axis equal;
% 绘制决策反馈同步后信号星座图
subplot(2, 2, 4);
plot(real(synced_signal_decision(80000:end)), imag(synced_signal_decision(80000:end)), 'r.');
title('决策反馈同步后星座图');
xlabel('Real Part');
ylabel('Imaginary Part');
grid on;
axis equal;
0X_084m4.完整算法代码文件获得
V