🌟 引言:注意力为何改变CNN的命运?
就像人类视觉会优先聚焦于重要信息,深度学习模型也需要"学会看重点"。从2018年SENet首提通道注意力,到2024年SSCA探索空间-通道协同效应,注意力机制正成为CNN性能提升的核武器,这些注意力机制思想不仅不断改造提升着CNN,也影响到了Transformer架构中的注意力设计。本文带大家穿越6年技术迭代,揭秘那些改变视觉模型的注意力模块!
第一站:SENet(2018 CVPR)- 通道注意力的开山之作
核心思想:
- Squeeze操作:用全局平均池化将H×W×C特征图压缩成1×1×C的通道描述符
- Excitation机制:通过全连接层+Sigmoid生成通道权重,实现特征的"有选择放大"
性能提升:在ResNet基础上Top-1准确率提升2.3%,参数仅增加0.5M
代码实现:
python
import torch
import torch.nn as nn
class SE(nn.Module):
def __init__(self, channel, reduction= 16):
super(SE, self).__init__()
# part 1:(H, W, C) -> (1, 1, C)
self.avg_pool = nn.AdaptiveAvgPool2d(1)
# part 2, compute weight of each channel
self.fc = nn.Sequential(
nn.Linear(channel, channel // reduction, bias=False),
nn.ReLU(inplace=True),
nn.Linear(channel // reduction, channel, bias=False),
nn.Sigmoid(), # nn.Softmax is OK here
)
def forward(self, x) :
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
return x * y
if __name__ == '__main__':
# 创建随机输入张量,假设输入形状为(batch_size, channels, height, width)
input_tensor = torch.randn(1, 64, 32, 32) # batch_size=1, channels=64, height=32, width=32
# 创建SE块实例
se_block = SE(channel=64)
# 测试SE块
output_se = se_block(input_tensor)
print("Output shape of SE block:", output_se.shape)第二站:CBAM(2018 ECCV)- 空间×通道的双重视角
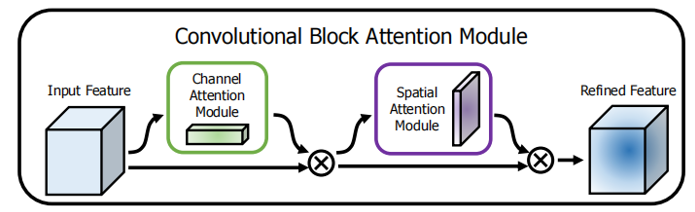
创新点:
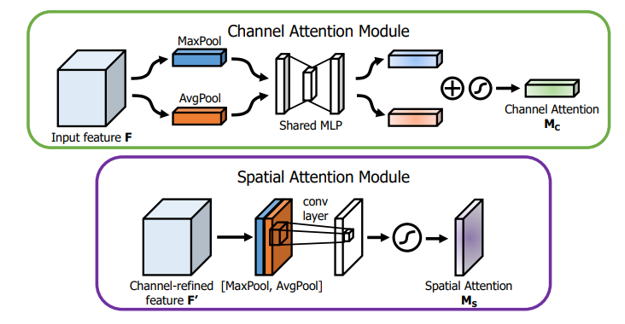
- 通道注意力:融合最大池化+平均池化,通过MLP学习通道间相关性。
- 空间注意力:在空间维度上进行注意力分配。它通过对输入特征图进行通道间的全局平均池化和全局最大池化,然后将这两个结果进行拼接,并通过一个7x7的卷积层来学习空间位置之间的相关性,最后使用sigmoid函数生成空间注意力权重。
亮点:在ResNet50上仅增加1.4%计算量,准确率提升3.1%
结构示意:输入 → 通道注意力 → 空间注意力 → 输出
代码实现:
python
import torch.nn as nn
import torch
class CBAM(nn.Module):
def __init__(
self,
in_chans,
reduction= 16,
kernel_size= 7,
min_channels= 8,
):
super(CBAM, self).__init__()
# channel-wise attention
hidden_chans = max(in_chans // reduction, min_channels)
self.mlp_chans = nn.Sequential(
nn.Conv2d(in_chans, hidden_chans, kernel_size=1, bias=False),
nn.ReLU(),
nn.Conv2d(hidden_chans, in_chans, kernel_size=1, bias=False),
)
# space-wise attention
self.mlp_spaces = nn.Conv2d(2, 1, kernel_size=kernel_size, padding=3, bias=False)
self.gate = nn.Sigmoid()
def forward(self, x: torch.Tensor) -> torch.Tensor:
# (B, C, 1, 1)
avg_x_s = x.mean((2, 3), keepdim=True)
# (B, C, 1, 1)
max_x_s = x.max(dim=2, keepdim=True)[0].max(dim=3, keepdim=True)[0]
# (B, C, 1, 1)
x = x * self.gate(self.mlp_chans(avg_x_s) + self.mlp_chans(max_x_s))
# (B, 1, H, W)
avg_x_c = x.mean(dim=1, keepdim=True)
max_x_c = x.max(dim=1, keepdim=True)[0]
x = x * self.gate(self.mlp_spaces(torch.cat((avg_x_c, max_x_c), dim=1)))
return x
if __name__ == '__main__':
input_tensor = torch.randn(1, 64, 32, 32)
ca_module = CBAM(in_chans=64)
output_tensor = ca_module(input_tensor)
print(output_tensor.shape)第三站:DA(2019 CVPR)- 空间与通道的双重依赖
核心思想:
- 位置注意力模块:通过自注意力机制捕捉特征图中任意两个位置之间的空间依赖性
- 通道注意力模块:通过自注意力机制捕捉任意两个通道图之间的通道依赖性
- 融合策略:将两种注意力模块的输出进行融合,增强特征表示
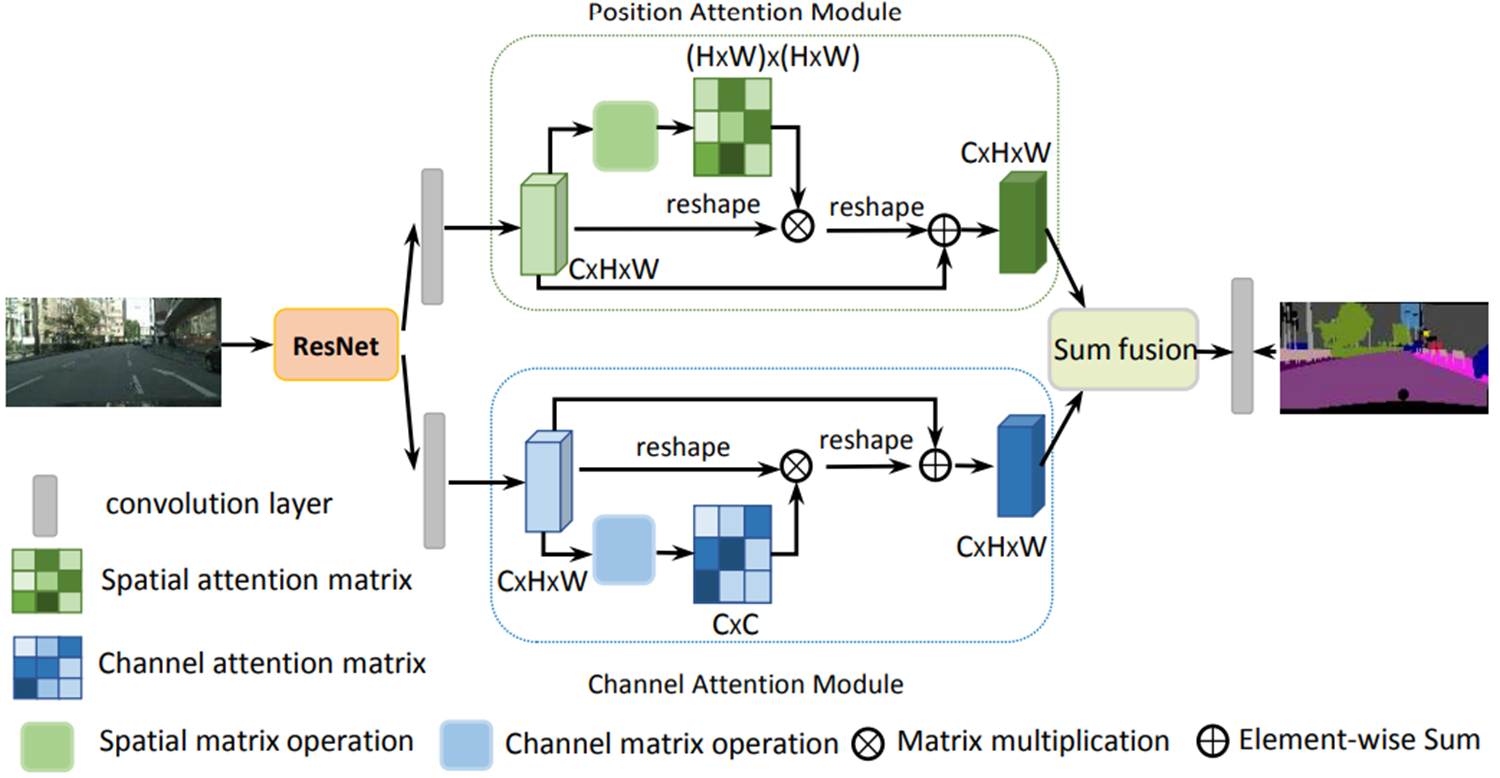
结构示意:
-
在传统的扩张FCN之上附加了两种类型的注意力模块,分别模拟空间和通道维度中的语义相互依赖性
-
位置注意力模块通过自注意力机制捕捉特征图中任意两个位置之间的空间依赖
-
通道注意力模块使用类似的自注意力机制捕捉任意两个通道图之间的通道依赖性
-
最后,将这两个注意力模块的输出进行融合,以进一步增强特征表示
代码实现:
python
import torch
import torch.nn as nn
class PAM(nn.Module):
"""
position attention module with self-attention mechanism
位置注意力模块,使用自注意力机制
"""
def __init__(self, in_chans: int):
super(PAM, self).__init__()
self.in_chans = in_chans
# 定义三个卷积层:q、k、v,分别用于计算查询(Query)、键(Key)、值(Value)特征。
self.q = nn.Conv2d(in_chans, in_chans // 8, kernel_size=1) # 查询卷积
self.k = nn.Conv2d(in_chans, in_chans // 8, kernel_size=1) # 键卷积
self.v = nn.Conv2d(in_chans, in_chans, kernel_size=1) # 值卷积
# 定义一个可学习的缩放因子gamma
self.gamma = nn.Parameter(torch.zeros(1))
# Softmax操作用于计算注意力权重
self.softmax = nn.Softmax(dim=-1)
def forward(self, x: torch.Tensor):
b, c, h, w = x.size() # 获取输入张量的尺寸,b为batch大小,c为通道数,h为高度,w为宽度
# (B, HW, C) 计算查询q的形状,B是batch size,HW是特征图的空间展平后长度,C是通道数
q = self.q(x).view(b, -1, h * w).permute(0, 2, 1) # 计算查询q,并将其展平成(B, HW, C)的形状,并做转置
# (B, C, HW) 计算键k的形状,展平特征图为(B, C, HW)
k = self.k(x).view(b, -1, h * w)
# (B, C, HW) 计算值v的形状,展平特征图为(B, C, HW)
v = self.v(x).view(b, -1, h * w)
# (B, HW, HW) 计算注意力矩阵,q与k的乘积,再做softmax处理,得到注意力权重
attn = self.softmax(torch.bmm(q, k)) # q和k的乘积,计算注意力分数并应用softmax
# (B, C, HW) 计算输出结果,注意力矩阵与值v相乘,得到最终加权后的特征
out = torch.bmm(v, attn.permute(0, 2, 1)) # 计算加权后的输出,注意力矩阵需要转置
# 将输出的形状还原为原来的尺寸(B, C, H, W)
out = out.view(b, c, h, w)
# 使用gamma进行缩放,并将原始输入x与输出相加,形成残差连接
out = self.gamma * out + x
return out
class CAM(nn.Module):
"""
channel attention module with self-attention mechanism
通道注意力模块,使用自注意力机制
"""
def __init__(self, in_chans: int):
super(CAM, self).__init__()
self.in_chans = in_chans
# 定义一个可学习的缩放因子gamma
self.gamma = nn.Parameter(torch.zeros(1))
# Softmax操作用于计算注意力权重
self.softmax = nn.Softmax(dim=-1)
def forward(self, x: torch.Tensor) -> torch.Tensor:
b, c, w, h = x.size() # 获取输入张量的尺寸,b为batch大小,c为通道数,w为宽度,h为高度
# (B, C, HW) 将输入张量展平为(B, C, HW),HW表示宽度和高度的展平
q = x.view(b, c, -1)
# (B, HW, C) 转置得到(B, HW, C)形状,以便后续计算注意力
k = x.view(b, c, -1).permute(0, 2, 1)
# (B, C, HW) 直接用输入张量展平得到(B, C, HW)
v = x.view(b, c, -1)
# (B, C, C) 计算q和k的矩阵乘积,得到能量矩阵
energy = torch.bmm(q, k)
# 通过max操作处理能量矩阵,找到每个通道的最大能量,进行缩放
energy_new = torch.max(energy, dim=-1, keepdim=True)[0].expand_as(energy) - energy
# 计算注意力权重,使用softmax对缩放后的能量进行归一化
attn = self.softmax(energy_new)
# (B, C, HW) 使用注意力权重对v加权,得到加权后的输出
out = torch.bmm(attn, v)
# 将输出的形状还原为原来的尺寸(B, C, H, W)
out = out.view(b, c, h, w)
# 使用gamma进行缩放,并将原始输入x与输出相加,形成残差连接
out = self.gamma * out + x
return out
class DualAttention(nn.Module):
def __init__(self, in_chans: int):
super(DualAttention, self).__init__()
self.in_chans = in_chans
self.pam = PAM(in_chans)
self.cam = CAM(in_chans)
def forward(self, x: torch.Tensor) -> torch.Tensor:
pam = self.pam(x)
cam = self.cam(x)
return pam + cam
if __name__ == '__main__':
model = DualAttention(in_chans=64)
x = torch.rand((3, 64, 40, 40))
print(model(x).size())第四站:SK(2019 CVPR)- 选择性核注意力
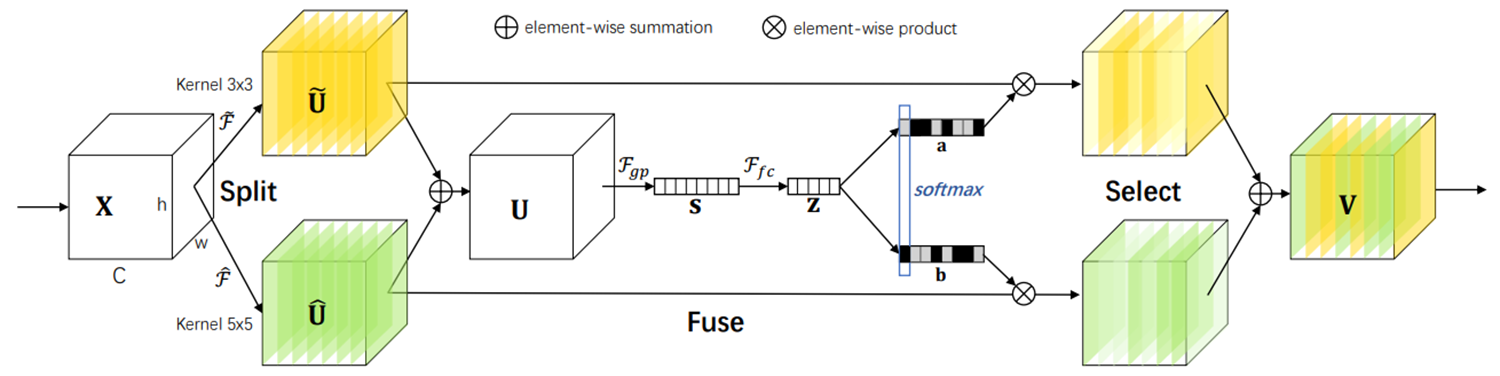
核心思想:
- 多核选择:通过不同大小的卷积核(如3×3、5×5)提取多尺度特征
- 自适应融合:根据输入特征动态选择最优卷积核大小,平衡计算复杂度和特征表达能力
结构示意:
-
轻量级和高效性:ECA模块只涉及少量参数,同时带来明显的性能提升。它避免了传统注意力机制中的复杂降维和升维过程,通过局部跨通道交互策略,以一维卷积的方式高效实现。
-
局部跨通道交互:ECA模块通过一维卷积捕捉通道间的依赖关系,这种策略不需要降维,从而显著降低了模型复杂性。
-
自适应卷积核大小:ECA模块开发了一种方法来自适应选择一维卷积的核大小,以确定局部跨通道交互的覆盖范围。
性能表现:在ResNet50基础上Top-1准确率提升1.5%,计算量仅增加2.3%
代码实现:
python
import torch
import torch.nn as nn
import torch.nn.functional as F
def auto_pad(k, d=1):
"""
自动计算卷积操作所需的填充量,确保输出尺寸符合要求。
:param k: 卷积核的大小 (kernel size),通常为单一整数或者元组。
:param d: 膨胀系数 (dilation),通常默认为1。膨胀系数影响卷积核的有效大小。
:return: 填充量 (padding)
"""
# 如果卷积核大小是整数,转换为元组
if isinstance(k, int):
k = (k, k)
# 如果膨胀系数大于1,卷积核的有效大小会增大
effective_kernel_size = (k[0] - 1) * d + 1 # 计算膨胀后的卷积核大小
# 假设我们希望使用"same"填充来保持输出尺寸和输入尺寸相同
padding = (effective_kernel_size - 1) // 2 # 保证输出尺寸与输入尺寸一致
return padding
class ConvModule(nn.Module):
def __init__(self,in_chans, hidden_chans, kernel_size,stride,groups=1,padding=0, dilation=0,norm_cfg='BN', act_cfg='ReLU'):
super().__init__()
self.conv = nn.Conv2d(in_chans,
hidden_chans,
kernel_size=kernel_size,
stride=stride,
groups=groups,
padding=padding,
dilation=dilation)
if norm_cfg == 'BN':
self.norm = nn.BatchNorm2d(hidden_chans)
elif norm_cfg == 'GN':
self.norm = nn.GroupNorm(32, hidden_chans)
if act_cfg == 'ReLU':
self.act = nn.ReLU(inplace=True)
elif act_cfg == 'LeakyReLU':
self.act = nn.LeakyReLU(inplace=True)
elif act_cfg == 'HSwish':
self.act = nn.Hardswish(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.norm(x)
x = self.act(x)
return x
class SK(nn.Module):
def __init__(
self,
in_chans,
out_chans,
num= 2,
kernel_size= 3,
stride= 1,
groups= 1,
reduction= 16,
norm_cfg='BN',
act_cfg='ReLU'):
super(SK, self).__init__()
self.num = num
self.out_chans = out_chans
self.kernel_size = kernel_size
self.conv = nn.ModuleList()
for i in range(num):
self.conv.append(ConvModule(in_chans, out_chans, kernel_size, stride=stride, groups=groups, dilation=1 + i,
padding=auto_pad(k=kernel_size, d=1 + i), norm_cfg=norm_cfg, act_cfg=act_cfg))
# fc can be implemented by 1x1 conv
self.fc = nn.Sequential(
# use relu act to improve nonlinear expression ability
ConvModule(in_chans, out_chans // reduction, kernel_size=1,stride=stride, norm_cfg=norm_cfg, act_cfg=act_cfg),
nn.Conv2d(out_chans // reduction, out_chans * self.num, kernel_size=1, bias=False)
)
# compute channels weight
self.softmax = nn.Softmax(dim=1)
def forward(self, x: torch.Tensor) -> torch.Tensor:
# use different convolutional kernel to conv
temp_feature = [conv(x) for conv in self.conv]
x = torch.stack(temp_feature, dim=1)
# fuse different output and squeeze
attn = x.sum(1).mean((2, 3), keepdim=True)
# excitation
attn = self.fc(attn)
batch, c, h, w = attn.size()
attn = attn.view(batch, self.num, self.out_chans, h, w)
attn = self.softmax(attn)
# select
x = x * attn
x = torch.sum(x, dim=1)
return x
if __name__ == "__main__":
model = SK(in_chans=64,out_chans=64)
x = torch.rand((3, 64, 40, 40))
print(model(x).size())第五站:ECA-Net(2020 CVPR)- 用1D卷积颠覆传统注意力
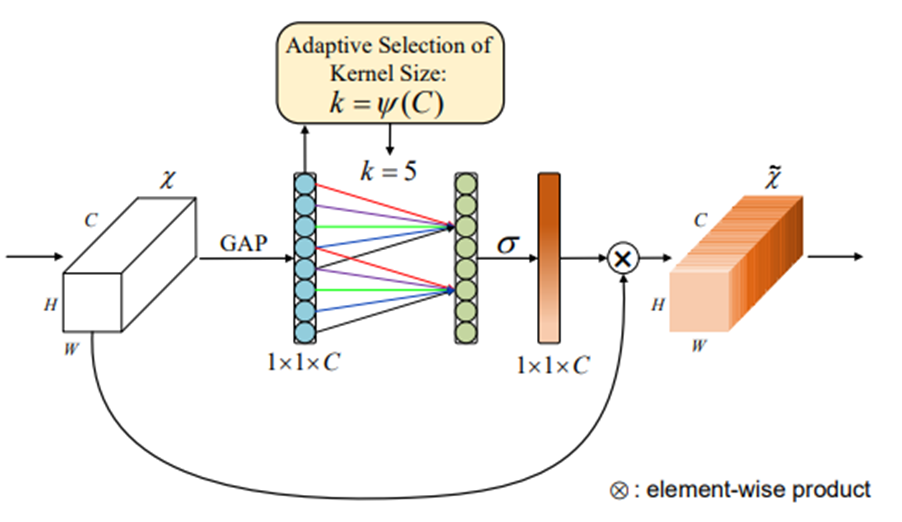
革命性设计:
- 用1D卷积替代全连接层,降低98%参数量
- 自适应核大小选择算法,动态调整感受野
性能对比:
| 模块 | 参数量 | Top-1提升 |
|---|---|---|
| SENet | 1.5M | +2.3% |
| ECA-Net | 2.8k | +2.7% |
核心结构:
-
轻量级和高效性:ECA模块只涉及少量参数,同时带来明显的性能提升。它避免了传统注意力机制中的复杂降维和升维过程,通过局部跨通道交互策略,以一维卷积的方式高效实现。
-
局部跨通道交互:ECA模块通过一维卷积捕捉通道间的依赖关系,这种策略不需要降维,从而显著降低了模型复杂性。
-
自适应卷积核大小:ECA模块开发了一种方法来自适应选择一维卷积的核大小,以确定局部跨通道交互的覆盖范围。
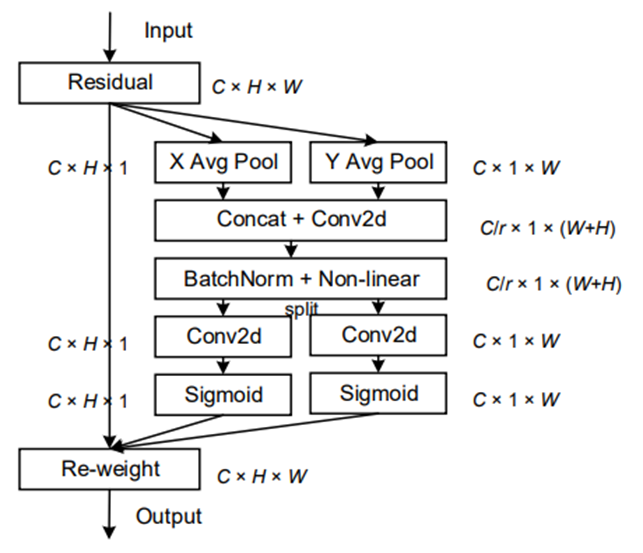
第六站:CA(2021 CVPR)- 坐标注意力的巧妙设计
核心思想:
- 方向感知特征图:通过沿垂直和水平方向的全局平均池化,将特征图分解为两个独立的方向感知特征图
- 长距离依赖:在保留位置信息的同时,捕获特征图中不同位置的长距离依赖关系
- 高效融合:将两个方向感知特征图编码为注意力张量,实现空间和通道信息的高效融合
结构示意:
-
考虑了空间维度注意力和通道维度注意力,这有助于模型定位、识别和增强更有趣的对象。
-
CA利用两个2-D全局平均池化(GAP)操作分别沿着垂直和水平方向聚合输入特征到两个独立的方向感知特征图中。然后,分别将这两个特征图编码成一个注意力张量。
-
在这两个特征图(Cx1xW和CxHx1)中,一个使用GAP来模拟特征图在空间维度上的长距离依赖,同时在另一个空间维度保留位置信息。在这种情况下,两个特征图、空间信息和长距离依赖相互补充。
性能表现:在MobileNetV2上Top-1准确率提升5.1%,计算量仅增加1.2%
代码实现:
python
import torch
import torch.nn as nn
import torch.nn.functional as F
class ConvModule(nn.Module):
def __init__(self,in_chans, hidden_chans, kernel_size=1, norm_cfg='BN', act_cfg='HSwish'):
super().__init__()
self.conv = nn.Conv2d(in_chans, hidden_chans, kernel_size=kernel_size)
if norm_cfg == 'BN':
self.norm = nn.BatchNorm2d(hidden_chans)
elif norm_cfg == 'GN':
self.norm = nn.GroupNorm(32, hidden_chans)
if act_cfg == 'ReLU':
self.act = nn.ReLU(inplace=True)
elif act_cfg == 'LeakyReLU':
self.act = nn.LeakyReLU(inplace=True)
elif act_cfg == 'HSwish':
self.act = nn.Hardswish(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.norm(x)
x = self.act(x)
return x
class CoordinateAttention(nn.Module):
"""
坐标注意力模块,用于将位置信息嵌入到通道注意力中。
"""
def __init__(self,
in_chans,
reduction=32,
norm_cfg='BN',
act_cfg='HSwish'):
super(CoordinateAttention, self).__init__()
self.in_chans = in_chans
hidden_chans = max(8, in_chans // reduction)
self.conv = ConvModule(in_chans, hidden_chans, kernel_size=1, norm_cfg=norm_cfg, act_cfg=act_cfg)
self.attn_h = nn.Conv2d(hidden_chans, in_chans, 1)
self.attn_w = nn.Conv2d(hidden_chans, in_chans, 1)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
b, c, h, w = x.size()
# (b, c, h, 1)
x_h = x.mean(3, keepdim=True)
# (b, c, 1, w) -> (b, c, w, 1)
x_w = x.mean(2, keepdim=True).permute(0, 1, 3, 2)
# (b, c, h + w, 1)
y = torch.cat((x_h, x_w), dim=2)
y = self.conv(y)
# split
# x_h: (b, c, h, 1), x_w: (b, c, w, 1)
x_h, x_w = torch.split(y, [h, w], dim=2)
# (b, c, 1, w)
x_w = x_w.permute(0, 1, 3, 2)
# compute attention
a_h = self.sigmoid(self.attn_h(x_h))
a_w = self.sigmoid(self.attn_w(x_w))
return x * a_w * a_h
# 示例用法
if __name__ == "__main__":
# 创建一个输入特征图,假设批次大小为1,通道数为64,高度和宽度为32
input_tensor = torch.randn(1, 64, 32, 32)
# 创建CA模块实例,假设输入通道数为64,中间通道数为16
ca_module = CoordinateAttention(in_chans=64, reduction=32)
# 前向传播,获取带有坐标注意力的特征图
output_tensor = ca_module(input_tensor)
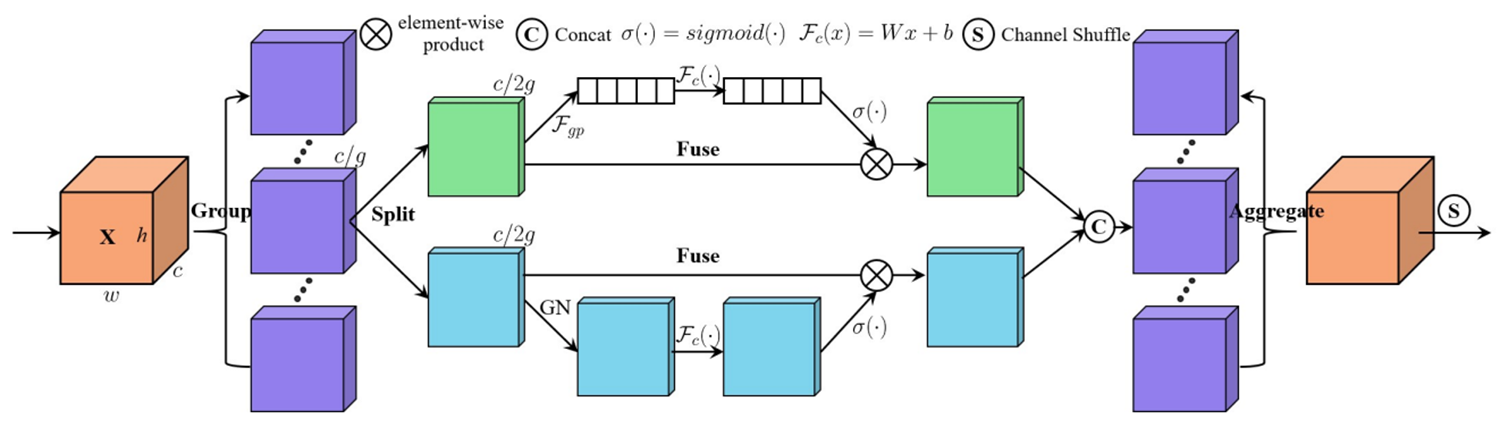
print(output_tensor.shape) # 输出形状应与输入特征图相同第七站:SA(2021 ICASSP)- 洗牌注意力的创新

核心思想:
- 通道重排:通过通道重排操作打乱通道顺序,增强模型对通道特征的表达能力
- 分组处理:将输入特征图的通道维度分成多个小组,分别计算通道注意力和空间注意力
- 信息交流:通过通道重排操作将不同子特征之间的信息进行交流
结构示意:
-
结合空间和通道注意力
-
通道重排技术:引入了通道重排,通过通道重排操作将通道顺序打乱,以增强模型对通道特征的表达能力。
-
SA先将输入特征图的通道维度分成多个小组,并进行分组处理。然后,对于每个子特征,使用全局平均池化和组归一化分别计算通道注意力和空间注意力。最后,使用通道重排操作将不同子特征之间的信息进行交流
性能表现:在轻量级模型中Top-1准确率提升3.8%,计算量仅增加1.5%
代码实现:
python
import torch
import torch.nn as nn
class SA(nn.Module):
"""
Shuffle Attention
"""
def __init__(self, in_chans: int, group_num: int = 64):
super(SA, self).__init__() # 调用父类 (nn.Module) 的构造函数
self.in_chans = in_chans # 输入的通道数
self.group_num = group_num # 分组数,默认为64
# channel weight and bias:定义通道的权重和偏置
self.c_w = nn.Parameter(torch.zeros((1, in_chans // (2 * group_num), 1, 1)), requires_grad=True) # 通道的权重
self.c_b = nn.Parameter(torch.ones((1, in_chans // (2 * group_num), 1, 1)), requires_grad=True) # 通道的偏置
# spatial weight and bias:定义空间的权重和偏置
self.s_w = nn.Parameter(torch.zeros((1, in_chans // (2 * group_num), 1, 1)), requires_grad=True) # 空间的权重
self.s_b = nn.Parameter(torch.ones((1, in_chans // (2 * group_num), 1, 1)), requires_grad=True) # 空间的偏置
self.gn = nn.GroupNorm(in_chans // (2 * group_num), in_chans // (2 * group_num)) # 定义 GroupNorm 层,用于归一化
self.gate = nn.Sigmoid() # 定义 Sigmoid 激活函数,用于生成门控权重
@staticmethod
def channel_shuffle(x: torch.Tensor, groups: int):
b, c, h, w = x.shape # 获取输入张量的尺寸,b = batch size,c = 通道数,h = 高度,w = 宽度
x = x.reshape(b, groups, -1, h, w) # 将输入张量按照 groups 分组,重塑形状
x = x.permute(0, 2, 1, 3, 4) # 交换维度,使得通道分组在第二维
# flatten:将分组后的张量展平
x = x.reshape(b, -1, h, w) # 将分组后的张量恢复为原始的通道数维度
return x # 返回重新排列后的张量
def forward(self, x: torch.Tensor) -> torch.Tensor:
b, c, h, w = x.size() # 获取输入 x 的尺寸,b = batch size,c = 通道数,h = 高度,w = 宽度
# (B, C, H, W) -> (B * G, C // G, H, W):将输入张量按照分组数进行重塑
x = x.reshape(b * self.group_num, -1, h, w) # 将输入按分组数分组并重新形状
x_0, x_1 = x.chunk(2, dim=1) # 将张量 x 沿着通道维度 (dim=1) 切分成两个部分,分别命名为 x_0 和 x_1
# (B * G, C // 2G, H, W) -> (B * G, C // 2G, 1, 1):计算通道权重
xc = x_0.mean(dim=(2, 3), keepdim=True) # 对 x_0 在高宽维度 (dim=(2, 3)) 上取均值,得到每个通道的平均值
xc = self.c_w * xc + self.c_b # 乘以通道权重并加上通道偏置
xc = x_0 * self.gate(xc) # 使用 Sigmoid 激活函数进行门控操作,对 x_0 应用门控权重
# (B * G, C // 2G, H, W) -> (B * G, C // 2G, 1, 1):计算空间权重
xs = self.gn(x_1) # 对 x_1 进行 GroupNorm 归一化
xs = self.s_w * xs + self.s_b # 乘以空间权重并加上空间偏置
xs = x_1 * self.gate(xs) # 使用 Sigmoid 激活函数进行门控操作,对 x_1 应用门控权重
out = torch.cat((xc, xs), dim=1) # 在通道维度上拼接 xc 和 xs,得到最终的输出
out = out.reshape(b, -1, h, w) # 恢复为原始的形状 (B, C, H, W)
out = self.channel_shuffle(out, 2) # 对输出张量进行通道洗牌,增加模型的表现力
return out # 返回最终的输出张量
if __name__ == '__main__':
model = SA(in_chans=64,group_num=8)
x = torch.rand((3, 64, 40, 40))
print(model(x).size())第八站 2023双子星 之CPCA(Computers in Biology and Medicine 2023)
核心贡献:
- 医学图像专用的通道先验机制
- 在脑肿瘤分割任务Dice系数提升6.8%
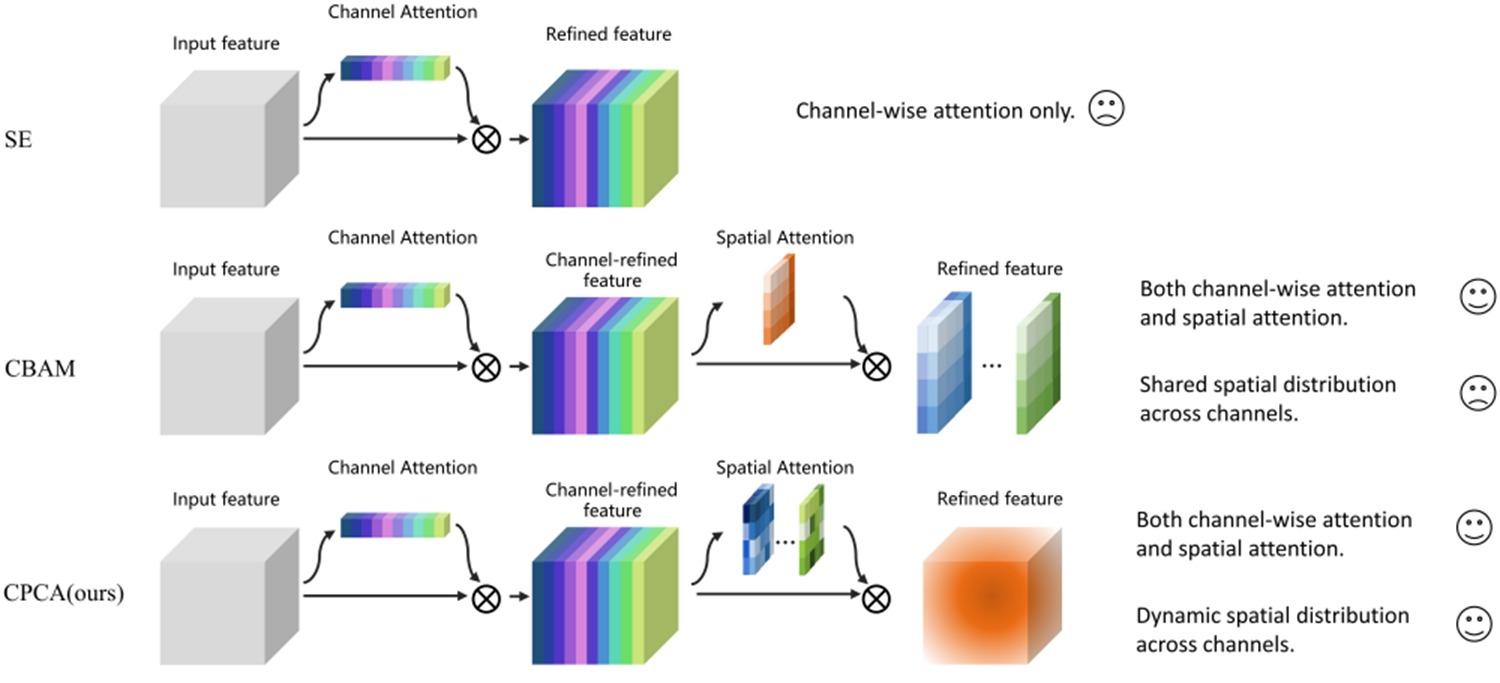
结构示意:
-
动态分配注意力权重:在通道和空间两个维度上动态分配注意力权重,CBAM只是在通道动态。
-
深度可分离卷积模块:采用不同尺度的条形卷积核来提取像素间的空间映射关系,降低计算复杂度的同时,确保了有效信息的提取。
-
通道先验:通过输入特征和通道注意力图的元素相乘来获得通道先验,然后将通道先验输入到深度卷积模块中以生成空间注意力图
代码实现:
python
import torch
import torch.nn as nn
class ChannelAttention(nn.Module):
"""
Channel attention module based on CPCA
use hidden_chans to reduce parameters instead of conventional convolution
"""
def __init__(self, in_chans: int, hidden_chans: int):
super().__init__()
self.fc1 = nn.Conv2d(in_chans, hidden_chans, kernel_size=1, stride=1, bias=True)
self.fc2 = nn.Conv2d(hidden_chans, in_chans, kernel_size=1, stride=1, bias=True)
self.act = nn.ReLU(inplace=True)
self.in_chans = in_chans
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""
x dim is (B, C, H, W)
"""
# (B, C, 1, 1)
# 均值池化
# 得到通道的全局描述,保留了通道的整体信息,但没有考虑局部的最强特征
x1 = x.mean(dim=(2, 3), keepdim=True)
x1 = self.fc2(self.act(self.fc1(x1)))
x1 = torch.sigmoid(x1)
# (B, C, 1, 1)
# 最大池化
# 保留了通道中的局部最强特征,能够突出图像中最显著的部分,而抑制较弱的特征
x2 = x.max(dim=2, keepdim=True)[0].max(dim=3, keepdim=True)[0]
x2 = self.fc2(self.act(self.fc1(x2)))
x2 = torch.sigmoid(x2)
x = x1 + x2
x = x.view(-1, self.in_chans, 1, 1)
return x
class CPCA(nn.Module):
"""
Channel Attention and Spatial Attention based on CPCA
"""
def __init__(self, in_chans, reduction= 16):
super(CPCA, self).__init__()
self.in_chans = in_chans
hidden_chans = in_chans // reduction
# 通道注意力(Channel Attention)
self.ca = ChannelAttention(in_chans, hidden_chans)
# 空间注意力(Spatial Attention)
# 使用不同大小的卷积核来捕捉不同感受野的空间信息
# 5x5深度可分离卷积
self.dwc5_5 = nn.Conv2d(in_chans, in_chans, kernel_size=5, padding=2, groups=in_chans)
# 1x7深度可分离卷积
self.dwc1_7 = nn.Conv2d(in_chans, in_chans, kernel_size=(1, 7), padding=(0, 3), groups=in_chans)
# 7x1深度可分离卷积
self.dwc7_1 = nn.Conv2d(in_chans, in_chans, kernel_size=(7, 1), padding=(3, 0), groups=in_chans)
# 1x11深度可分离卷积
self.dwc1_11 = nn.Conv2d(in_chans, in_chans, kernel_size=(1, 11), padding=(0, 5), groups=in_chans)
# 11x1深度可分离卷积
self.dwc11_1 = nn.Conv2d(in_chans, in_chans, kernel_size=(11, 1), padding=(5, 0), groups=in_chans)
# 1x21深度可分离卷积
self.dwc1_21 = nn.Conv2d(in_chans, in_chans, kernel_size=(1, 21), padding=(0, 10), groups=in_chans)
# 21x1深度可分离卷积
self.dwc21_1 = nn.Conv2d(in_chans, in_chans, kernel_size=(21, 1), padding=(10, 0), groups=in_chans)
# 用于建模不同感受野之间的特征连接
self.conv = nn.Conv2d(in_chans, in_chans, kernel_size=1, padding=0)
self.act = nn.GELU()
def forward(self, x):
x = self.conv(x) # 先用1x1卷积压缩通道
x = self.act(x)
channel_attn = self.ca(x) # 计算通道注意力
x = channel_attn * x # 通道注意力加权输入特征
# 计算空间注意力部分
x_init = self.dwc5_5(x) # 先通过5x5卷积
x1 = self.dwc1_7(x_init) # 1x7卷积
x1 = self.dwc7_1(x1) # 7x1卷积
x2 = self.dwc1_11(x_init) # 1x11卷积
x2 = self.dwc11_1(x2) # 11x1卷积
x3 = self.dwc1_21(x_init) # 1x21卷积
x3 = self.dwc21_1(x3) # 21x1卷积
# 合并不同卷积结果,形成空间注意力
spatial_atn = x1 + x2 + x3 + x_init # 将不同感受野的特征求和
spatial_atn = self.conv(spatial_atn) # 再通过1x1卷积进行处理
y = x * spatial_atn # 将通道加权后的特征与空间注意力加权的特征相乘
y = self.conv(y)
return y
if __name__ == '__main__':
input_tensor = torch.randn(1, 64, 32, 32)
attention_module = CPCA(in_chans=64)
output_tensor = attention_module(input_tensor)
print(output_tensor.shape)第九站 :2023双子星之EMA**(ICASSP 2023)**
核心思想:
- 多尺度并行子网络捕获跨维度交互
- 在目标检测任务中mAP提升4.2%
结构示意:
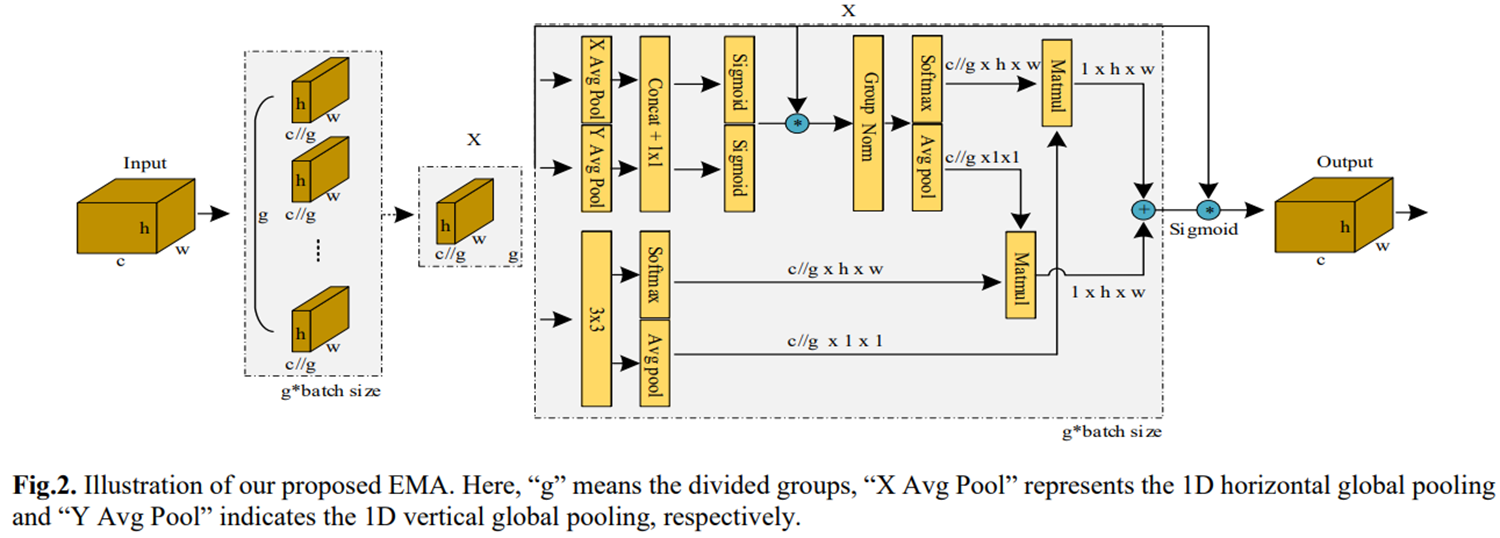
-
通道和空间注意力的结合
-
多尺度并行子网络:包括一个处理1x1卷积核和一个处理3x3卷积核的并行子网络。这种结构有助于有效捕获跨维度交互作用。
-
坐标注意力(CA)的再审视:EMA模块在坐标注意力(CA)的基础上进行了改进和优化。CA模块通过将位置信息嵌入通道注意力图中,实现了跨通道和空间信息的融合。EMA模块在此基础上进一步发展,通过并行子网络块有效捕获跨维度交互作用,建立不同维度之间的依赖关系
代码实现:
python
import torch
import torch.nn as nn
class EMA(nn.Module):
"""
EMA: Exponential Moving Average (指数移动平均)
"""
def __init__(self, channels, factor=32):
super(EMA, self).__init__() # 调用父类 (nn.Module) 的构造函数
self.groups = factor # 将 factor 赋值给 groups,决定分组数量
assert channels // self.groups > 0 # 确保通道数可以被分组数整除,避免出错
self.softmax = nn.Softmax(-1) # 定义 Softmax 激活函数,在最后一维进行归一化
self.agp = nn.AdaptiveAvgPool2d((1, 1)) # 定义自适应平均池化层,将输入大小压缩为 1x1
self.pool_h = nn.AdaptiveAvgPool2d((None, 1)) # 定义自适应池化层,按高度进行池化
self.pool_w = nn.AdaptiveAvgPool2d((1, None)) # 定义自适应池化层,按宽度进行池化
self.gn = nn.GroupNorm(channels // self.groups, channels // self.groups) # 定义 GroupNorm 层
self.conv1x1 = nn.Conv2d(channels // self.groups, channels // self.groups, kernel_size=1, stride=1,
padding=0) # 定义 1x1 卷积层
self.conv3x3 = nn.Conv2d(channels // self.groups, channels // self.groups, kernel_size=3, stride=1,
padding=1) # 定义 3x3 卷积层
def forward(self, x):
b, c, h, w = x.size() # 获取输入 x 的尺寸,分别为 batch size (b), 通道数 (c), 高度 (h), 宽度 (w)
group_x = x.reshape(b * self.groups, -1, h, w) # 将输入 x 重塑为 (b * groups, c//groups, h, w),用于分组处理
x_h = self.pool_h(group_x) # 对每组的输入进行高度方向上的池化
x_w = self.pool_w(group_x).permute(0, 1, 3, 2) # 对每组的输入进行宽度方向上的池化,并调整维度顺序
hw = self.conv1x1(torch.cat([x_h, x_w], dim=2)) # 将池化后的结果在维度2 (高度和宽度) 上拼接,然后通过 1x1 卷积层
x_h, x_w = torch.split(hw, [h, w], dim=2) # 将卷积后的结果分割为高度和宽度两个部分
x1 = self.gn(group_x * x_h.sigmoid() * x_w.permute(0, 1, 3, 2).sigmoid()) # 对分组后的输入做加权操作并通过 GroupNorm
x2 = self.conv3x3(group_x) # 对分组后的输入做 3x3 卷积操作
x11 = self.softmax(self.agp(x1).reshape(b * self.groups, -1, 1).permute(0, 2, 1)) # 对 x1 进行池化,Softmax 归一化
x12 = x2.reshape(b * self.groups, c // self.groups, -1) # 将 x2 重塑为形状 (b*g, c//g, hw)
x21 = self.softmax(self.agp(x2).reshape(b * self.groups, -1, 1).permute(0, 2, 1)) # 对 x2 进行池化,Softmax 归一化
x22 = x1.reshape(b * self.groups, c // self.groups, -1) # 将 x1 重塑为形状 (b*g, c//g, hw)
# 计算加权矩阵
weights = (torch.matmul(x11, x12) + torch.matmul(x21, x22)).reshape(b * self.groups, 1, h, w)
# 将加权后的结果与输入相乘,并恢复为原始输入形状
return (group_x * weights.sigmoid()).reshape(b, c, h, w)
if __name__ == '__main__':
model = EMA(channels=64)
x = torch.rand((3, 64, 40, 40))
print(model(x).size())终章:SSCA(2024 arXiv)- 空间×通道的协同革命

技术亮点:
-
空间注意力(SMSA):
-
4路特征拆分+多核1D卷积(3/5/7/9)
-
Concat+GN+Sigmoid生成空间权重
-
-
通道注意力(PCSA):
-
渐进式特征池化+自注意力矩阵计算
-
在MobileNetV2上Top-1准确率提升5.1%
-
结构示意:
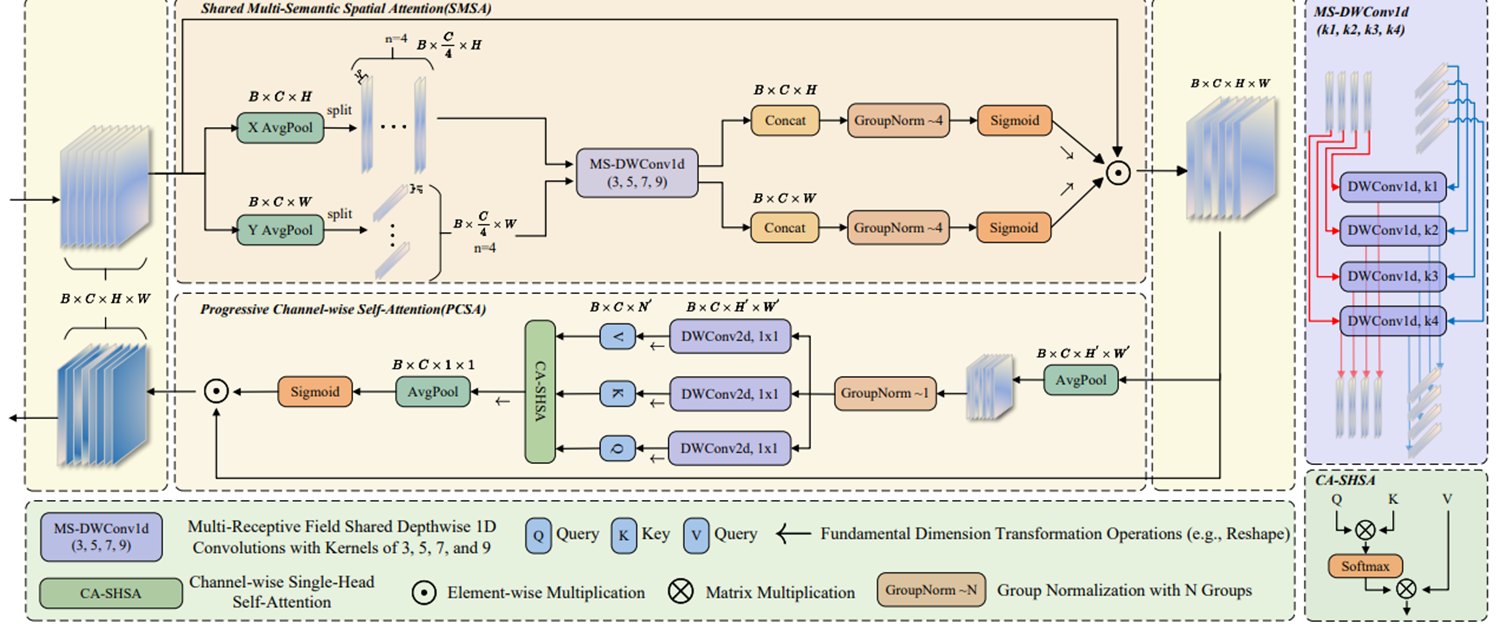
SMSA空间注意力实现原理
-
**平均池化:**分别沿高度和宽度方向
-
**特征拆分:**4等分
-
**特征提取:**四个深度共享1D卷积(卷积核大小分别为3,5,7,9)对各部分特征进行处理
-
空间注意力计算:Concat+GN+Sigmoid
PCSA 通道自注意力实现原理(渐进式)
-
下采样:可选平均池化、最大池化或重组合
-
特征归一化与变换:GN+1×1深度卷积生成查询(q)、键(k)和值(v)
-
注意力矩阵计算:
代码实现:
python
import typing as t
import torch
import torch.nn as nn
from einops import rearrange
class SCSA(nn.Module):
def __init__(
self,
dim: int,
head_num: int,
window_size: int = 7,
group_kernel_sizes: t.List[int] = [3, 5, 7, 9],
qkv_bias: bool = False,
fuse_bn: bool = False,
down_sample_mode: str = 'avg_pool',
attn_drop_ratio: float = 0.,
gate_layer: str = 'sigmoid',
):
super(SCSA, self).__init__() # 调用 nn.Module 的构造函数
self.dim = dim # 特征维度
self.head_num = head_num # 注意力头数
self.head_dim = dim // head_num # 每个头的维度
self.scaler = self.head_dim ** -0.5 # 缩放因子
self.group_kernel_sizes = group_kernel_sizes # 分组卷积核大小
self.window_size = window_size # 窗口大小
self.qkv_bias = qkv_bias # 是否使用偏置
self.fuse_bn = fuse_bn # 是否融合批归一化
self.down_sample_mode = down_sample_mode # 下采样模式
assert self.dim % 4 == 0, 'The dimension of input feature should be divisible by 4.' # 确保维度可被4整除
self.group_chans = group_chans = self.dim // 4 # 分组通道数
# 定义局部和全局深度卷积层
self.local_dwc = nn.Conv1d(group_chans, group_chans, kernel_size=group_kernel_sizes[0],
padding=group_kernel_sizes[0] // 2, groups=group_chans)
self.global_dwc_s = nn.Conv1d(group_chans, group_chans, kernel_size=group_kernel_sizes[1],
padding=group_kernel_sizes[1] // 2, groups=group_chans)
self.global_dwc_m = nn.Conv1d(group_chans, group_chans, kernel_size=group_kernel_sizes[2],
padding=group_kernel_sizes[2] // 2, groups=group_chans)
self.global_dwc_l = nn.Conv1d(group_chans, group_chans, kernel_size=group_kernel_sizes[3],
padding=group_kernel_sizes[3] // 2, groups=group_chans)
# 注意力门控层
self.sa_gate = nn.Softmax(dim=2) if gate_layer == 'softmax' else nn.Sigmoid()
self.norm_h = nn.GroupNorm(4, dim) # 水平方向的归一化
self.norm_w = nn.GroupNorm(4, dim) # 垂直方向的归一化
self.conv_d = nn.Identity() # 直接连接
self.norm = nn.GroupNorm(1, dim) # 通道归一化
# 定义查询、键和值的卷积层
self.q = nn.Conv2d(in_channels=dim, out_channels=dim, kernel_size=1, bias=qkv_bias, groups=dim)
self.k = nn.Conv2d(in_channels=dim, out_channels=dim, kernel_size=1, bias=qkv_bias, groups=dim)
self.v = nn.Conv2d(in_channels=dim, out_channels=dim, kernel_size=1, bias=qkv_bias, groups=dim)
self.attn_drop = nn.Dropout(attn_drop_ratio) # 注意力丢弃层
self.ca_gate = nn.Softmax(dim=1) if gate_layer == 'softmax' else nn.Sigmoid() # 通道注意力门控
# 根据窗口大小和下采样模式选择下采样函数
if window_size == -1:
self.down_func = nn.AdaptiveAvgPool2d((1, 1)) # 自适应平均池化
else:
if down_sample_mode == 'recombination':
self.down_func = self.space_to_chans # 重组合下采样
# 维度降低
self.conv_d = nn.Conv2d(in_channels=dim * window_size ** 2, out_channels=dim, kernel_size=1, bias=False)
elif down_sample_mode == 'avg_pool':
self.down_func = nn.AvgPool2d(kernel_size=(window_size, window_size), stride=window_size) # 平均池化
elif down_sample_mode == 'max_pool':
self.down_func = nn.MaxPool2d(kernel_size=(window_size, window_size), stride=window_size) # 最大池化
def forward(self, x: torch.Tensor) -> torch.Tensor:
"""
输入张量 x 的维度为 (B, C, H, W)
"""
# 计算空间注意力优先级
b, c, h_, w_ = x.size() # 获取输入的形状
# (B, C, H)
x_h = x.mean(dim=3) # 沿着宽度维度求平均
l_x_h, g_x_h_s, g_x_h_m, g_x_h_l = torch.split(x_h, self.group_chans, dim=1) # 拆分通道
# (B, C, W)
x_w = x.mean(dim=2) # 沿着高度维度求平均
l_x_w, g_x_w_s, g_x_w_m, g_x_w_l = torch.split(x_w, self.group_chans, dim=1) # 拆分通道
# 计算水平注意力
x_h_attn = self.sa_gate(self.norm_h(torch.cat((
self.local_dwc(l_x_h),
self.global_dwc_s(g_x_h_s),
self.global_dwc_m(g_x_h_m),
self.global_dwc_l(g_x_h_l),
), dim=1)))
x_h_attn = x_h_attn.view(b, c, h_, 1) # 调整形状
# 计算垂直注意力
x_w_attn = self.sa_gate(self.norm_w(torch.cat((
self.local_dwc(l_x_w),
self.global_dwc_s(g_x_w_s),
self.global_dwc_m(g_x_w_m),
self.global_dwc_l(g_x_w_l)
), dim=1)))
x_w_attn = x_w_attn.view(b, c, 1, w_) # 调整形状
# 计算最终的注意力加权
x = x * x_h_attn * x_w_attn
# 基于自注意力的通道注意力
# 减少计算量
y = self.down_func(x) # 下采样
y = self.conv_d(y) # 维度转换
_, _, h_, w_ = y.size() # 获取形状
# 先归一化,然后重塑 -> (B, H, W, C) -> (B, C, H * W),并生成 q, k 和 v
y = self.norm(y) # 归一化
q = self.q(y) # 计算查询
k = self.k(y) # 计算键
v = self.v(y) # 计算值
# (B, C, H, W) -> (B, head_num, head_dim, N)
q = rearrange(q, 'b (head_num head_dim) h w -> b head_num head_dim (h w)', head_num=int(self.head_num),
head_dim=int(self.head_dim))
k = rearrange(k, 'b (head_num head_dim) h w -> b head_num head_dim (h w)', head_num=int(self.head_num),
head_dim=int(self.head_dim))
v = rearrange(v, 'b (head_num head_dim) h w -> b head_num head_dim (h w)', head_num=int(self.head_num),
head_dim=int(self.head_dim))
# 计算注意力
attn = q @ k.transpose(-2, -1) * self.scaler # 点积注意力计算
attn = self.attn_drop(attn.softmax(dim=-1)) # 应用注意力丢弃
# (B, head_num, head_dim, N)
attn = attn @ v # 加权值
# (B, C, H_, W_)
attn = rearrange(attn, 'b head_num head_dim (h w) -> b (head_num head_dim) h w', h=int(h_), w=int(w_))
# (B, C, 1, 1)
attn = attn.mean((2, 3), keepdim=True) # 求平均
attn = self.ca_gate(attn) # 应用通道注意力门控
return attn * x # 返回加权后的输入
if __name__ == "__main__":
#参数: dim特征维度; head_num注意力头数; window_size = 7 窗口大小
scsa = SCSA(dim=32, head_num=8, window_size=7)
# 随机生成输入张量 (B, C, H, W)
input_tensor = torch.rand(1, 32, 256, 256)
# 打印输入张量的形状
print(f"输入张量的形状: {input_tensor.shape}")
# 前向传播
output_tensor = scsa(input_tensor)
# 打印输出张量的形状
print(f"输出张量的形状: {output_tensor.shape}")后续发展:注意力机制的三个趋势
- 高效性:向轻量化、无参数方向发展(如ECA、ELA)
- 多模态融合:探索视觉+语言的跨模态注意力
- 自适应机制:动态调整计算资源分配
结语
从SE到SSCA,注意力机制正从"单一增强"走向"协同进化"。下一个突破点会是动态可重构的注意力吗?让我们共同见证深度学习的新篇章!