教授 机器人工具 灵活 操作难题
在教授机器人灵活使用工具方面,目前主要有两种策略:一是人类遥控(用于模仿学习),二是模拟到现实的强化学习。然而,这两种方法均存在明显的局限性。
1、人类遥控(用于模仿学习):在实际操作中困难重重。人类在没有触摸反馈的情况下,很难在不同实施例中做出安全且灵巧的动作。
2、模拟到现实的强化学习:领域差距使模拟策略难用于现实;复杂任务需特定参数和模型架构,耗时费力且可扩展性差。
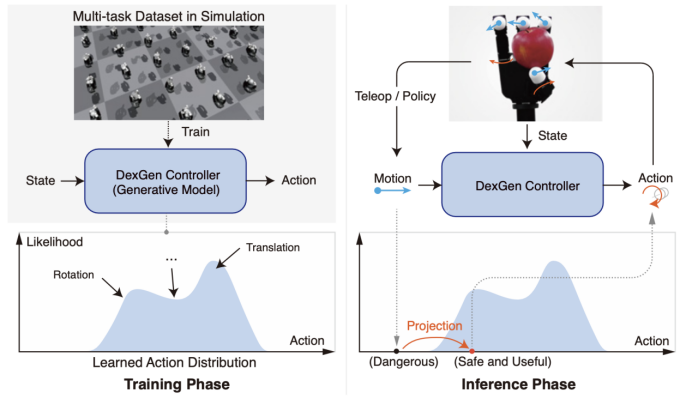
加州大学伯克利分校 BAIR 研究院与 Meta AI 携手开发出 DexGen,旨在解决教授机器人灵活使用工具的难题。DexGen 借助生成式模型优化机器人运动,可使机器人将人类给出的粗略操作指令,在仿真环境中通过强化学习自主调整,转换为精准且安全的动作。
DexGen技术解析 :
建立一套成熟的操作认知:
让 DexGen 在模拟里学习多样灵巧操作行为,借助远程操作等高级策略把粗略动作细化成精细灵巧动作。
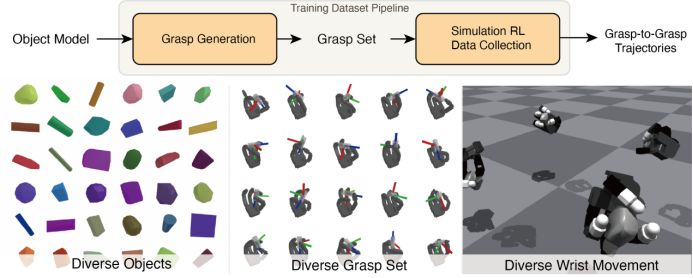
扩大数据集
用强化学习代理生成大型 Anygrasp - to - Anygrasp 数据集,以此为核心构建庞大多任务灵巧操作数据集,对 DexGen 进行预训练。
实现应用:将 DexGen 用于远程操作,在各种有挑战性的设置中,借助它让人类通过增强遥控系统进行灵巧操作,且 DexGen 能在不同场景拒绝危险行为。
在这项研究中,Franka Robotics 机械臂作为主要核心硬件,为 DexGen 在真实环境中的稳定执行提供了有力支撑,具体优势如下:
高精度:姿态重复误差率控制在 ±0.1mm 以内,保障操作精准。
低延迟:实时响应控制,降低延迟,快速适应任务。
高灵活:七自由度设计,可在狭窄空间完成复杂任务。
强力控:关节配备扭矩传感器,精确感知和控制外力,保障安全。
可拓展:支持多种编程环境和接口,方便定制功能。
Franka Research 3 : DexGen验证的核心载体
模拟实验:
在模拟中测试 DexGen 协助次优策略解决 Anygrasp - to - Anygrasp 任务的能力。
模拟 2 种次优策略:
π_noisy(a|s)=π_expert(a|s)+��(−α,α),模拟添加均匀噪声执行危险次优操作的专家。
π_slow(a|s)=��(0,α)π_expert(a|s),为 expert 的减速版本。
比较次优expertπ向受援助的同行DexGen∘π,记录不同策略在一定时间内严重失败(掉落物体)平均次数和目标达成次数。
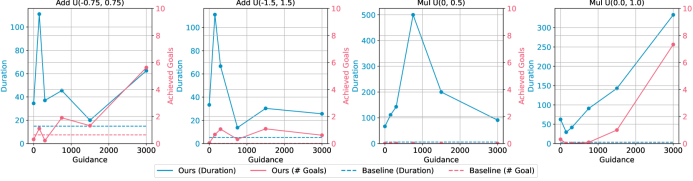
模拟评估结果:
用 DexGen 来修复一些被噪声干扰的任务。这些任务的动作范围在 -1, 1 之间,但外界干扰经常把这些动作搞乱。在20分钟的模拟测试里,可以看机械操作能持续多久,还有它们完成了多少目标。
结果显示,DexGen 能让这些操作任务表现得更好。它能让机械抓取的运行时间延长10到100倍,甚至能让那些被严重干扰、原本失败的任务操作也成功完成任务。证明了DexGen能够提高极次优策略的鲁棒性和成功率。
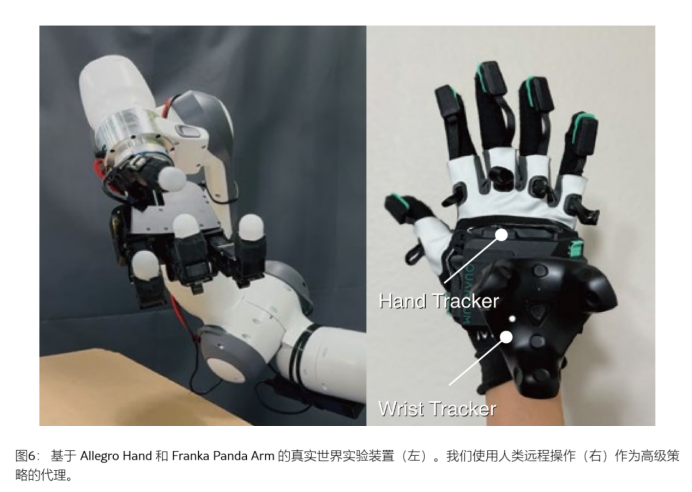
现实 场景 实验设置
- 使用 Allegro Hand 作为机械手,连接到 Franka - panda 机械臂。
- 基于重定向系统,用 Manus Glove 捕捉人类手部姿势(300Hz 运行机密快速重定向方法重定向到 Allegro 手)
- 通过 Vive 跟踪系统获 6D 人体手腕姿势,单独控制机械臂。
Franka 机器人执行精细任务的新时代!
实验任务:
- 螺丝刀任务:用户拿起桌上螺丝刀拧紧螺栓。
- 注射器任务:用户拿起注射器将液体注入目标区域。
- 玩魔方任务:用户操控机械手拿起魔方并进行转动操作,尝试完成魔方复原。
- 拿笔写字任务:用户控制机械手拿起笔,在特定书写区域写出指定内容。
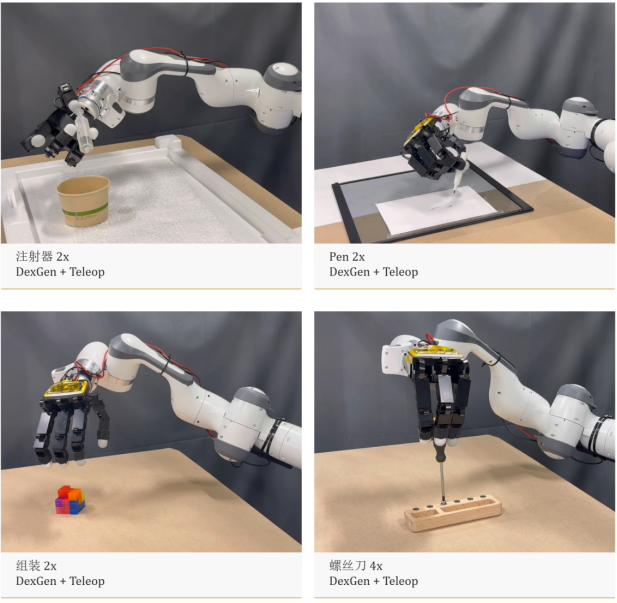
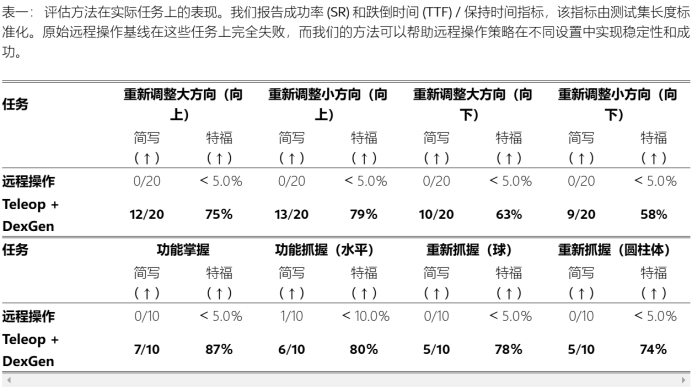
实验证明:
使用普通的遥操作系统几乎没法完成那些任务。在实际操作里,操作硬件很容易打滑,把物体给弄掉了。但用DexGen不一样,跟普通系统比起来,它能稳定,灵活的完整任务操作,帮用户搞定各种有挑战性的任务。
以上实验均使用Franka Research 3机械臂为实验硬件载体,该7自由度协作机器人可通过BFT机器人平台获取
Franka技术优势
精准灵活操作:Franka 精准拟人操作,远程操控灵活。
安全人机协作:实时力反馈与碰撞检测,人机协作更安全。
低本易维护:部署成本低,远程监控与维护简便。
Franka广泛应用场景
科研:仿生触觉模拟、人机神经机制研究。
工业:精密电子装配、柔性材料质检。
医疗:肝脏超声波扫描辅助、康复外骨骼阻抗调节。