一、原理介绍
在SPMSM开环I/f控制结构的基础上引入瞬时功率反馈调节算法,通过电机的瞬时有功功率调节电流矢量的转速,在电磁转矩中增加阻尼特性分量,改善电机的转速收敛特性;通过瞬时无功功率调节电流矢量的幅值,使 SPMSM运行在最大转矩/电流比状态,提高电机的效率和稳定性。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
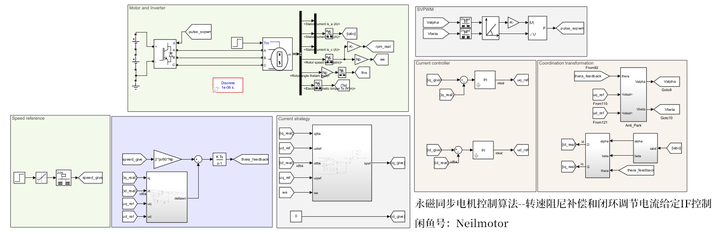
仿真工况:电机空载零速启动,给定转速为斜坡信号,0.25s到达给定转速500rpm,1.5s施加阶跃负载
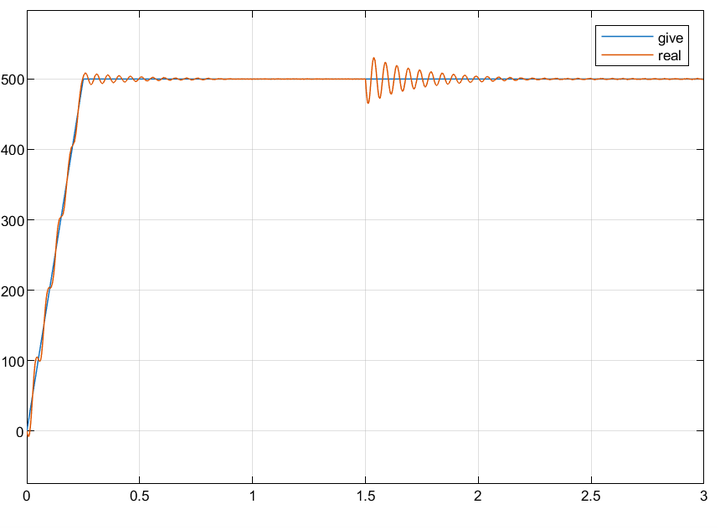
(前者为开环IF,后者为转速阻尼补偿和闭环调节电流给定IF控制)
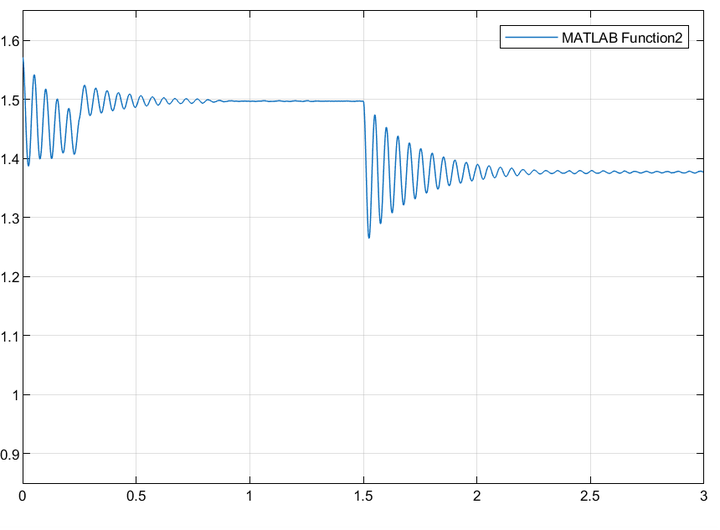
2.1转速
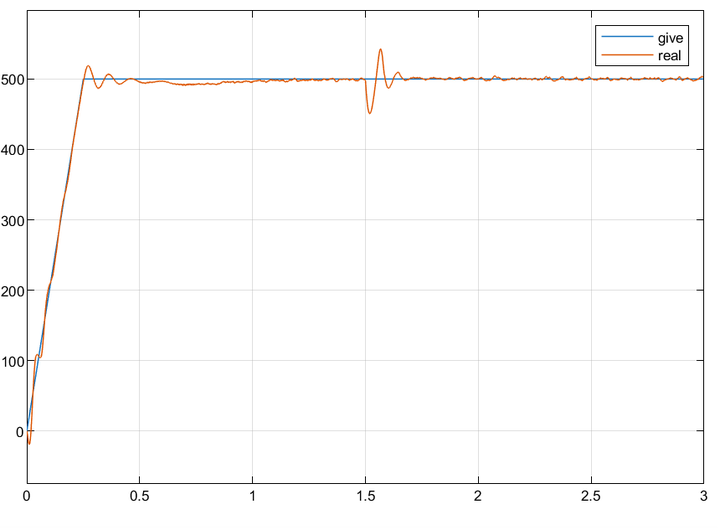
可以看出在0.5s到1s之内,转速略微有所下降,这是由于此时q轴给定电流在PI调节器作用下减小,进行自适应调节,待调节结束后,转速恢复稳定。
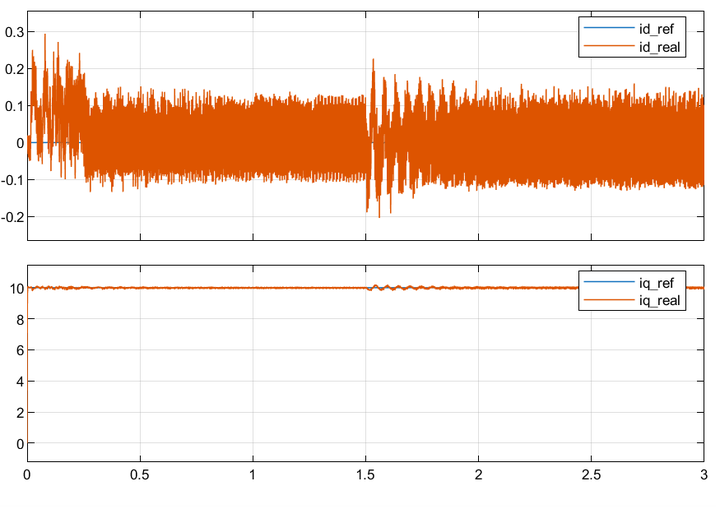
2.2dq轴电流
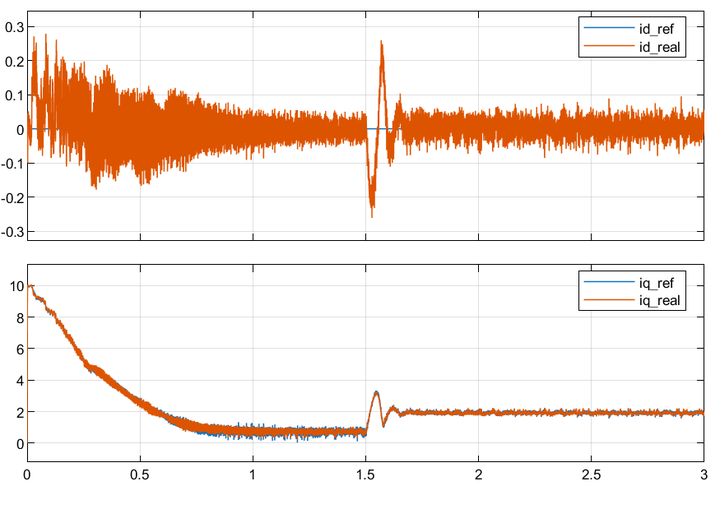
2.3虚拟坐标系与实际坐标系转角误差
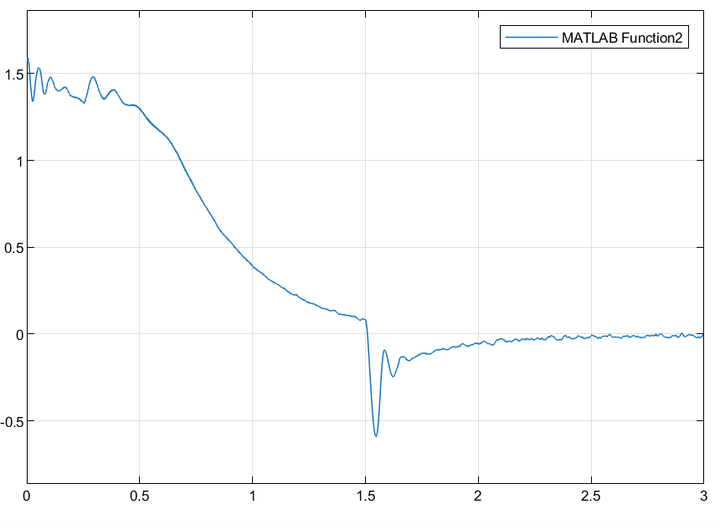
可以看出采用此方法可以实现给定转角与实际转角基本重合,便于后续切入中高速无速度传感器算法。为保证稳定,本仿真中PI调节器控制参数较小,所以在q轴电流给定值调节过程中,需要一定的时间。
2.4三相电流
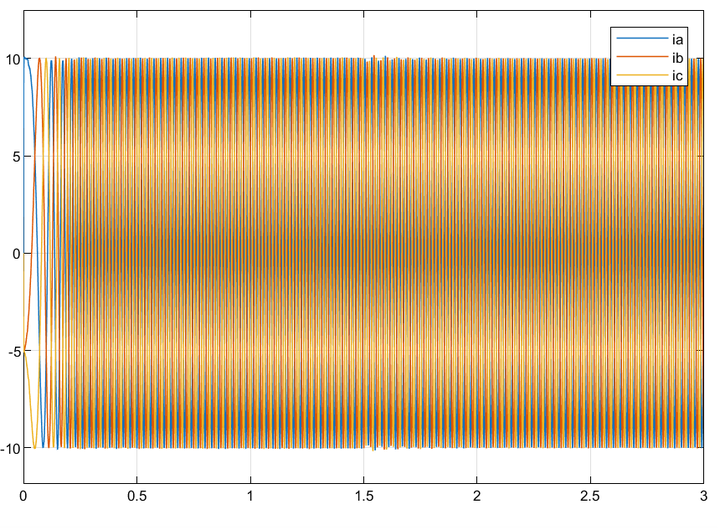
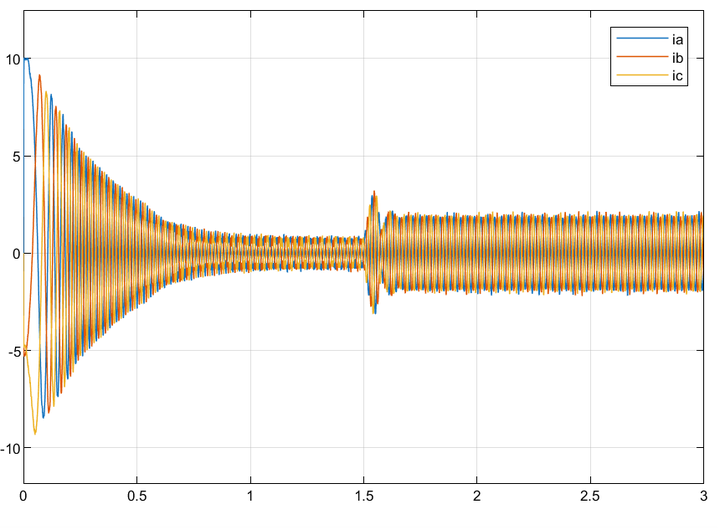
和基本的开环I/f控制方法相比,系统的性能有较大提升。通过电机的瞬时有功功率反馈调节电流矢量的转速,在电磁转矩中产生具有阻尼特性的分量,增加了系统的阻尼,使电机转速能够快速收敛至稳态。通过瞬时无功功率调节电流矢量的幅值, 使电机稳定运行在最大转矩/电流比状态,并提高了系统的鲁棒性。