一、无人机避障技术
- 技术实现方式
传感器融合:
视觉传感(RGB/双目/红外相机):基于SLAM(同步定位与地图构建)实现环境建模,但依赖光照条件。
激光雷达(LiDAR):高精度点云建模,但成本高、功耗大,小型无人机难以集成。
超声波雷达:短距离(5-10米)低成本避障,但易受环境噪声干扰。
毫米波雷达:穿透性强(雨雾环境适用),但分辨率低于激光雷达。
算法核心:
路径规划:A、RRT(快速扩展随机树)等算法实时生成避障路径。
动态障碍物预测:结合卡尔曼滤波或深度学习模型预测运动轨迹。
- 技术难点
实时性与算力矛盾:10m/s飞行速度下需毫秒级决策,边缘计算设备(如NVIDIA Jetson)的算力与功耗平衡。
复杂环境适应性:反光表面(玻璃)、低光照、密集动态障碍物(人群)导致传感器失效。
多传感器标定与同步:时空同步误差需控制在厘米/毫秒级,否则融合数据失效。
二、目标识别技术
- 技术实现方式
基于视觉的识别:
深度学习模型:YOLO、Faster R-CNN等模型部署,需优化模型轻量化(如TensorRT加速)。
多光谱融合:红外+可见光识别热源目标(如人体搜救)。
基于信号的识别:
射频信号(RFID/UWB):UWB定位精度达10cm级,但多径效应影响稳定性。
声学信号:特定频率声呐信标,抗电磁干扰但传播距离短。
光学信标:LED编码闪烁(如MoCAP系统),需直视链路。
- 技术难点
小目标识别:30米外直径20cm目标的像素不足(如4K相机在30米处分辨率约5cm/像素)。
对抗样本攻击:恶意干扰(如对抗贴纸欺骗图像识别)。
多目标跟踪(MOT):ID切换问题(如DeepSORT算法需关联目标特征)。
三、目标发射信号方式
- 主动信号发射
射频类:
蓝牙Beacon:低功耗(BLE 5.1),但距离<100米。
LoRaWAN:10km级远距离,但传输延迟高(秒级)。
光学类:
红外信标(IR Beacon):军用级加密频段,需定制接收模组。
激光编码:高指向性,但大气散射影响接收。
声学类:
超声波脉冲编码:水下无人机常用,空气衰减严重。
- 被动信号反射
RFID无源标签:依赖无人机发射激励信号,识别距离<10米。
二维码/ArUco标记:依赖视觉识别,倾角>45°时识别率下降。
- 技术难点:
信号冲突:多目标同频段信号干扰(需TDMA/FDMA调度)。
能量效率:目标端续航(如救灾信标需工作72小时以上)。
隐蔽性:军事场景需低截获概率(LPI)信号设计。
四、系统级挑战与前沿方向
- 端到端优化
硬件异构计算:FPGA加速信号处理+GPU运行神经网络。
通信-感知一体化:5G NR的Sidelink技术实现信号传输与定位同步。
- 抗干扰技术
认知无线电:动态跳频避开干扰频段。
量子加密信标:量子密钥分发(QKD)防窃听。
- 法规与标准化
频谱合规:ISM频段(如2.4GHz)的拥塞问题。
适航认证:民航局(如FAA)对避障系统的可靠性认证(如DO-178C)。
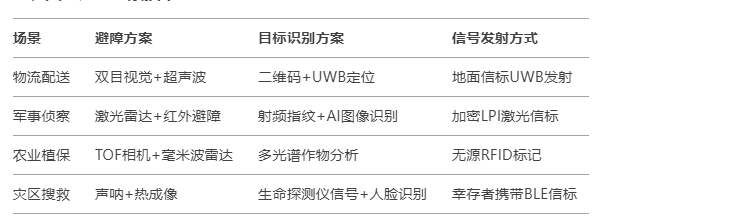
五、典型应用场景技术选型