一、MOPSO算法核心原理
MOPSO(多目标粒子群优化算法)通过模拟鸟群觅食行为,在搜索空间中寻找满足多个冲突目标的Pareto最优解集。其核心流程包括:
- 粒子初始化:随机生成粒子群,每个粒子代表一条候选路径,包含位置(路径坐标序列)和速度(路径调整方向)信息。
- 适应度评价:计算路径的多个目标函数值(如路径长度、能耗、安全距离等)。
- 非支配排序 :构建外部档案(External Archive, EA)存储当前非支配解,通过网格密度法或拥挤距离法维护档案多样性。
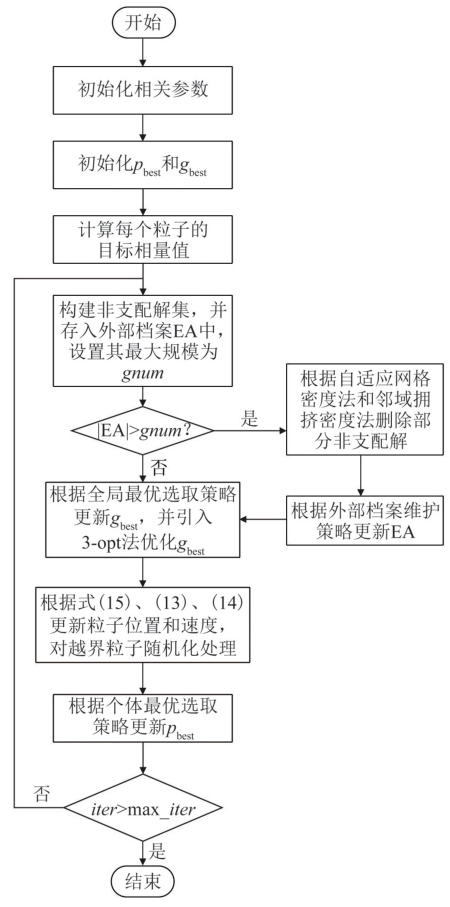
- 全局/个体最优解更新:从EA中选择引导粒子,结合3-opt局部优化策略提升解质量。
- 速度与位置更新:通过公式迭代调整粒子状态,直至满足终止条件。
二、无人机路径规划多目标建模
1. 目标函数设计
目标函数需综合考虑以下因素(以三维路径为例):
matlab
% 示例目标函数(需根据实际需求调整权重)
function [f1, f2, f3] = fitness(path)
% 目标1:路径总长度(欧氏距离累加)
f1 = sum(sqrt(diff(path.x).^2 + diff(path.y).^2 + diff(path.z).^2));
% 目标2:最小安全距离(与障碍物的最近距离)
f2 = min(calculateObstacleDistance(path));
% 目标3:能耗模型(与高度变化相关)
f3 = sum(abs(diff(path.z)) * energy_per_meter);
end- 权重法 :线性加权组合多个目标(如
F = w1*f1 + w2*f2 + w3*f3)。 - Pareto法:独立优化各目标,通过非支配解集提供多种权衡方案。
2. 关键约束条件
| 约束类型 | 处理方法 |
|---|---|
| 飞行高度 | 限制z坐标范围,超限时施加惩罚项(如penalty = γ*(h_actual - h_max)) |
| 转弯半径 | 通过Dubins曲线平滑路径,确保符合无人机机动能力 |
| 障碍物避碰 | 使用栅格法建模环境,检测路径段与障碍物相交性 |
| 能量限制 | 最大路径长度约束,超限粒子直接淘汰 |
三、障碍物建模与避障策略
1. 环境建模方法
- 栅格化处理:将三维空间离散化为立方体网格,标记障碍物栅格(0/1矩阵)。
- 不规则障碍物:采用凸化填充法将凹多边形分解为多个凸多边形,简化碰撞检测。
matlab
% 示例:障碍物栅格地图生成
map.resolution = 0.5; % 栅格粒度(km)
map.obstacles = load('obstacle_coordinates.txt');
gridMap = createGrid3D(map.obstacles, map.resolution);2. 避障检测算法
- 射线法:判断路径段是否与障碍物边界相交。
- 安全裕度:设置缓冲区(如0.4km),路径需与障碍物保持最小距离。
matlab
function isCollision = checkCollision(path, gridMap, safeMargin)
for i = 1:length(path.x)-1
segment = [path.x(i:i+1), path.y(i:i+1), path.z(i:i+1)];
if rayCast(segment, gridMap, safeMargin)
isCollision = true;
return;
end
end
isCollision = false;
end四、MOPSO算法Matlab实现框架
1. 主程序结构
matlab
% MOPSO参数设置
nParticles = 100; % 粒子数量
maxIter = 200; % 最大迭代次数
w = 0.7; % 惯性权重
c1 = 1.5; c2 = 1.5; % 学习因子
gridSize = [50,50]; % 外部档案网格维度
% 初始化粒子群
particles = initializeParticles(nParticles, map);
archive = []; % 外部档案
for iter = 1:maxIter
% 计算适应度并更新非支配解
fitnessValues = evaluateFitness(particles);
[nonDominated, dominated] = fastNonDominatedSort(fitnessValues);
archive = updateArchive([archive; particles(nonDominated)], gridSize);
% 选择全局引导粒子(基于网格密度)
gBest = selectGlobalBest(archive);
% 更新粒子速度与位置
particles = updateParticles(particles, gBest, w, c1, c2);
% 应用3-opt局部优化(提升路径平滑性)
particles = apply3Opt(particles, map);
% 越界处理与约束修复
particles = repairParticles(particles, map);
end
% 输出Pareto最优解集
plotParetoFront(archive);2. 关键函数实现
- 非支配排序:采用NSGA-II的快速非支配排序算法,复杂度O(MN²)。
- 外部档案管理:使用自适应网格法维护解集多样性,删除密集区域冗余解。
- 3-opt优化:对全局最优解进行局部路径优化,减少不必要的转折点。
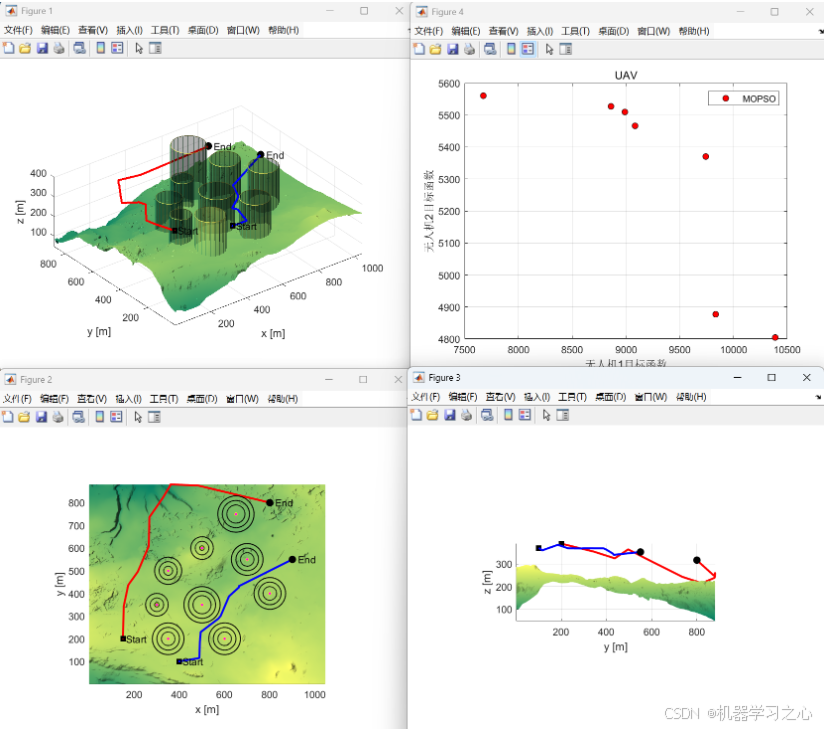
五、Pareto前沿可视化
通过Matplotlib或Matlab内置绘图工具展示多目标优化结果:
matlab
function plotParetoFront(archive)
f1 = [archive.f1];
f2 = [archive.f2];
scatter(f1, f2, 'filled');
xlabel('路径长度 (km)');
ylabel('安全距离 (m)');
title('MOPSO Pareto前沿');
grid on;
end