文章目录
前言
在深度学习项目中,特别是在使用卷积神经网络(CNN)处理计算机视觉任务时,模型保存策略是影响最终效果的关键因素。
一、最优模型
1、什么是保存最优模型?
保存最优模型指的是在训练过程中,根据某个指标(如验证集准确率或损失函数值)的表现,选择最好的模型参数并将其保存下来,然后形成一个文件,后缀名为pt\ppt\t7
在深度学习中,模型的训练过程通常是通过迭代优化算法(如梯度下降)来不断调整模型的参数,以最小化目标函数(如损失函数)。在每个训练周期结束后,会使用验证集或测试集对模型进行评估,计算模型在该指标上的性能。
二、代码实现
1、接上篇文章数据代码
链接: link
该篇讲述如何使用数据增强对代码进行优化。
2.定义CNN模型(前提:先进行数据增强)
代码如下(示例):
python
from torch import nn
class CNN(nn.Module):
def __init__(self): # 翰入大小 (3,256,256)
super(CNN,self).__init__()
self.conv1 = nn.Sequential( # 将多个层组合成一起。
nn.Conv2d( # 2d一般用于图像,3d用于视频数据(多一个时间维度),1d一般用于结构化的序
in_channels=3, # 图像通道个数,1表示灰度图(确定了卷积核 组中的个数)
out_channels=16, # 要得到几多少个特征图,卷积核的个数.
kernel_size=5, # 卷积核大小,5*5
stride=1, # 步长
padding=2, # 一般希望卷积核处理后的结果大小与处理前的数据大小相同,效果会比较好。那p
), # 输出的特征图为 (16,256,256)
nn.ReLU(),
nn.MaxPool2d(kernel_size=2), # 进行池化操作(2x2 区域),输出结果为:(16,128,128)
)
self.conv2 = nn.Sequential(
nn.Conv2d(16,32,5,1,2), # 输出(32,128,128)
nn.ReLU(),
nn.MaxPool2d(2) # 输出
)
self.conv3 = nn.Sequential(
nn.Conv2d(32,128,5,1,2),
nn.ReLU(),
)
self.out = nn.Linear(128*64*64,20) # 全连接
def forward(self,x): # 前向传播
x = self.conv1(x)
x = self.conv2(x)
x = self.conv3(x) # 输出(64,128,64,64)
x = x.view(x.size(0),-1)
output = self.out(x)
return output # 返回输出结果
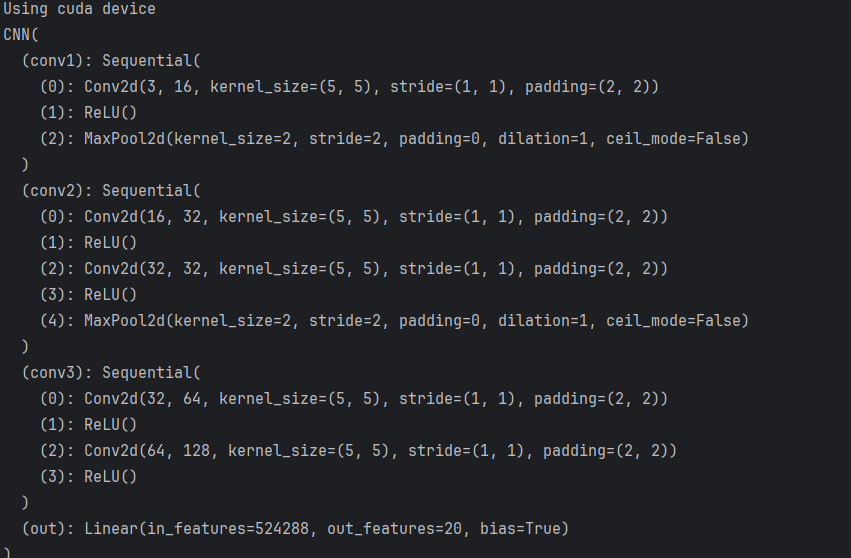
model = CNN().to(device) # 将卷积神经网络模型传入GPU
print(model) # 打印当前模型的构造打印结果:
3、设置训练模式
python
def train(dataloader, model, loss_fn, optimizer):
model.train()
#pytorch提供2种方式来切换训练和测试的模式,分别是:model.train() 和 model.eval()。
# 一般用法是:在训练开始之前写上model.trian(),在测试时写上 model.eval() 。
batch_size_num = 1
for X, y in dataloader: #其中batch为每一个数据的编号
X, y = X.to(device), y.to(device) #把训练数据集和标签传入cpu或GPU
pred = model.forward(X) #自动初始化 w权值
loss = loss_fn(pred, y) #通过交叉熵损失函数计算损失值loss
# Backpropagation 进来一个batch的数据,计算一次梯度,更新一次网络
optimizer.zero_grad() #梯度值清零
loss.backward() #反向传播计算得到每个参数的梯度值
optimizer.step() #根据梯度更新网络参数
loss = loss.item() #获取损失值
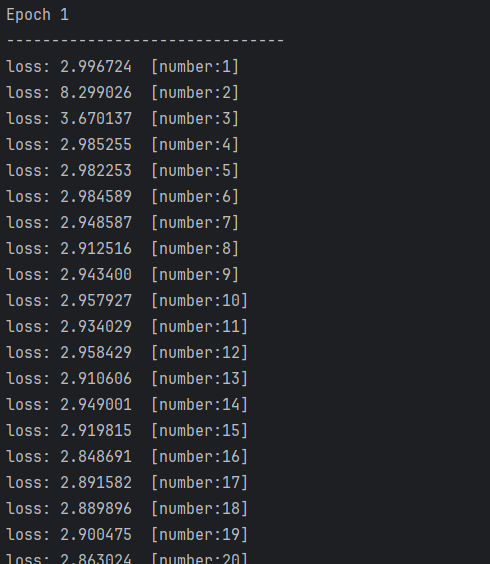
if batch_size_num %1 == 0:
print(f"loss: {loss:>7f} [number:{batch_size_num}]")
batch_size_num += 14、设置测试模式并加入最优模型best_acc
python
best_acc = 0
def test(dataloader, model, loss_fn):
global best_acc
size = len(dataloader.dataset)
num_batches = len(dataloader)
model.eval() #测试模式
test_loss, correct = 0, 0
with torch.no_grad(): #一个上下文管理器,关闭梯度计算。当你确认不会调用Tensor.backward()的时候。这可以减少计算所用内存消耗。
for X, y in dataloader:
X, y = X.to(device), y.to(device)
pred = model.forward(X)
test_loss += loss_fn(pred, y).item() #
correct += (pred.argmax(1) == y).type(torch.float).sum().item()
test_loss /= num_batches
correct /= size
if correct > best_acc:
best_acc = correct
torch.save(model,'best.pt')
print(f"Test result: \n Accuracy: {(100*correct)}%, Avg loss: {test_loss}")5、创建交叉熵损失函数以及优化器
python
loss_fn = nn.CrossEntropyLoss() #创建交叉熵损失函数对象,因为手写数字识别中一共有10个数字,输出会有10个结果
optimizer = torch.optim.Adam(model.parameters(),lr=0.001)#创建一个优化器,SGD为随机梯度下降算法
scheduler = torch.optim.lr_scheduler.StepLR(optimizer,step_size=5,gamma=0.5)
##params:要训练的参数,一般我们传入的都是model.parameters()。
##lr: learning_rate 学习率,也就是步长。
#loss表示模型训练后的输出结果与样本标签的差距。如果差距越小,就表示模型训练越好,越逼近真实的模型。6、开始训练模型
python
train_dataloader = DataLoader(training_data, batch_size=64, shuffle=True) # 创建数据加载器,将训练集和测试集图片及其标签打包
test_dataloader = DataLoader(test_data, batch_size=64, shuffle=True)
epochs = 150 # 设置模型训练的轮数,不停更新模型参数,找到最优值
acc_s = [] # 初始化了两个空列表,用于存储模型在每个epoch结束时的准确率和损失值
loss_s = []
for t in range(epochs): # 遍历轮数
print(f"Epoch {t+1}\n---------------------------") # 表示轮数展示
train(train_dataloader,model,loss_fn,optimizer) # 调用函数train传入训练集数据加载器、初始化的模型、损失函数、优化器
test(test_dataloader, model, loss_fn) # 上述训练集训练完后有了初步的模型,现传入测试集然后在对其进行测试,然后保存模型,然后进行迭代轮数,每每遇到最大准确率则重新保存新的模型7、结果
因为要遍历150次,耗费时间巨大,大家感兴趣的可以自己去实现一下!
8、生成最优模型文件
训练结束得到当前训练的最优模型,其为pt\pth\t7文件,可以直接拿过来使用。

总结
通过合理的模型保存策略,研究者可以在不增加额外计算成本的前提下,最大化卷积神经网络的潜在性能。