成像
成像过程:三维空间坐标到二维图像坐标的变换
相机矩阵:建立三维到二维的投影关系
相机的使用步骤(模型-视图变换):
(1)视图变换
(2)模型变换
(3)投影变换
(4)视口变换
相机的参数:含内参(intrinsics)、外参(extrinsics)、畸变系数(distortion coefficients)
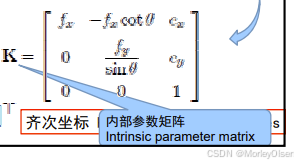
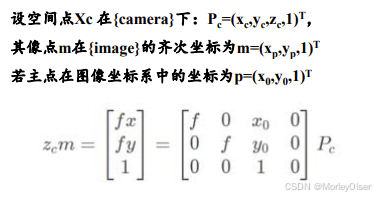
相机内参矩阵
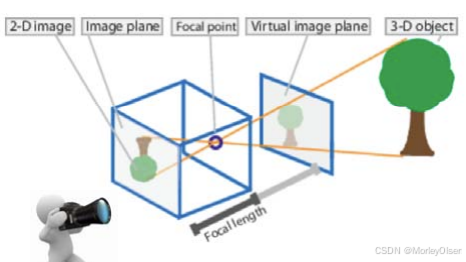
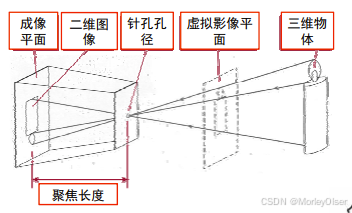
【1】针孔成像
障碍物滤除大多数的辐射线后,通过小孔成像。
即通过光圈孔径成像。
【2】相机模型基础
•针孔成像模型(Pinhole camera model)
•正射投影(Orthographic projection)
•缩放投影(Scaled orthographic projection)
•平行透视(Paraperspective projection)
•透视投影(Perspective projection)
【3】相机内参推演
内参矩阵:将3D相机坐标变换到2D齐次图像坐标
【4】相机内参矩阵计算
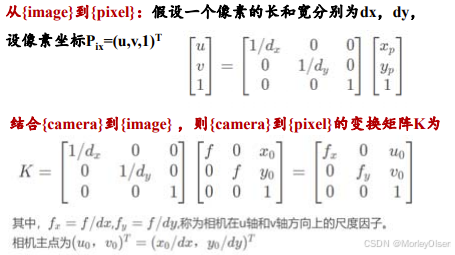
(1)焦距:从像素到世界单元
内参矩阵只关心相机坐标和图像坐标之间的关系,与相机的绝对尺寸无关
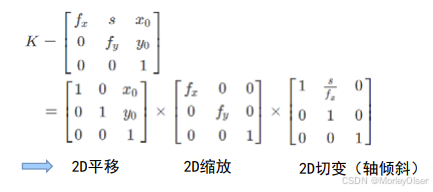
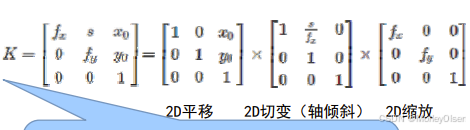
(2)2D变换中的相机内参的计算
方式一:将内参矩阵分解分别对应焦距、主点偏移、轴倾斜
方式二:将内参矩阵分解分别对应主点偏移、轴倾斜、焦距
内参不影响可见性------阻隔对象
在图像空间中无法通过简单的2D变换显示出来
相机外参矩阵
【1】相机外参导论
透视投影或立体投影
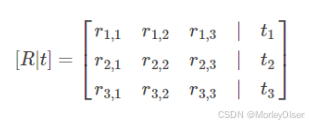
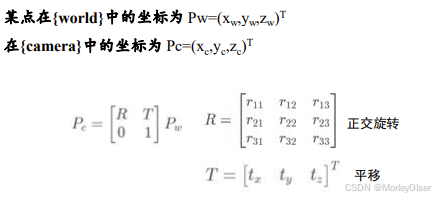
相机外参矩阵:世界坐标系到相机坐标系的刚体变换
旋转和平移来描述物体相对于相机坐标系统的相对姿态
世界坐标系与相机坐标系之间的关系可以用旋转矩阵 R 和平移向量 t来描述
(1)平移矩阵
(2)旋转矩阵
外参矩阵以刚体变换矩阵的形式:旋转矩阵 + 平移列向量
【2】相机外参求解
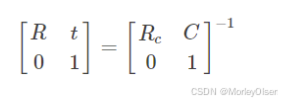
相机姿态的变换矩阵 (Rc |C)
描述相机中心在世界坐标系中的位置的 向量 C
相机在世界坐标系旋转到当前姿态需要的 旋转矩阵 Rc
外参矩阵 是 相机姿态矩阵的逆
结合相机内参+外参:
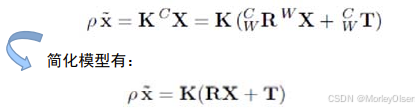
镜头畸变
镜头畸变:透镜由于制造精度以及组装工艺的偏差会引入畸变,导致原始图像的失真
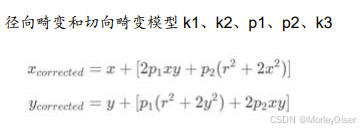
分类:径向畸变和切向畸变
一共有5个畸变参数:k1、k2、k3、p1、p2
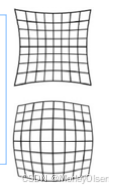
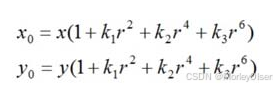
(1)径向畸变
沿着透镜半径方向分布的畸变
主要包括:枕形畸变和桶形畸变
调节公式:
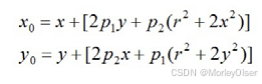
(2)切向畸变
透镜本身与相机传感器平面(成像平面)或 图像平面不平行
相机模型参数归纳
相机中四个坐标系:{world},{camera},{image},{pixel}
【1】从{world}到{camera}
【2】从{camera}到{image}
【3】从{image}到{pixel}
【4】从{world}到{pixel}四个坐标系的变换过程

镜头畸变:
16个单目相机的参数:
(1)10个内部参数

(2)6个外部参数