目录
[#4、确定 GPS 精度差](#4、确定 GPS 精度差)
[#5、确定 GPS 数据丢失](#5、确定 GPS 数据丢失)
#0、原因分析
位置背离的最常见原因是:
参考:Using the ECL EKF | PX4 Guide (v1.15)
- 高振动水平 。
- 通过改进 Autopilot 的机械隔离来修复。
- 增加 EKF2_ACC_NOISE 和 EKF2_GYR_NOISE 的值可能会有所帮助,但确实会使 EKF 更容易受到 GPS 故障的影响。
- 较大的陀螺仪偏置偏移 。
- 通过重新校准陀螺仪来修复。 检查冷启动预热期间是否过高的温度灵敏度 (> 3 度/秒的偏置变化,如果受绝缘影响,请更换传感器以减慢温度变化速率。
- 偏航对齐不良
- 检查磁力计校准和对准。
- 检查显示的航向 QGC 是否在 15 度以内
- GPS 精度差
- 检查干扰
- 改善分离和屏蔽
- 检查飞行位置是否有 GPS 信号障碍物和反射器(附近的高楼大厦)
- GPS 丢失
确定其中哪一个是主要原因需要一种有条不紊的方法来分析 EKF 日志数据:
- 绘制速度新息测试比率 -EstimatorStatus (打开新窗口).vel_test_ratio
- 绘制水平位置新息测试比率 -EstimatorStatus (打开新窗口).pos_test_ratio
- 绘制身高新息检验比率 -EstimatorStatus (打开新窗口).hgt_test_ratio
- 绘制磁力计新息测试比率 -EstimatorStatus (打开新窗口).mag_test_ratio
- 绘制 GPS 接收器报告的速度精度 -SensorGps.msg (打开新窗口).s_variance_m_s
- 绘制 IMU delta 角度状态估计值 -EstimatorStatus (打开新窗口).states10、states11 和 states12
- 绘制 EKF 内部高频振动指标:
- 三角角圆锥振动 -EstimatorStatus (打开新窗口).vibe0
- 高频 delta 角振动 -EstimatorStatus (打开新窗口).vibe1
- 高频 delta 速度振动 -EstimatorStatus (打开新窗口).vibe2
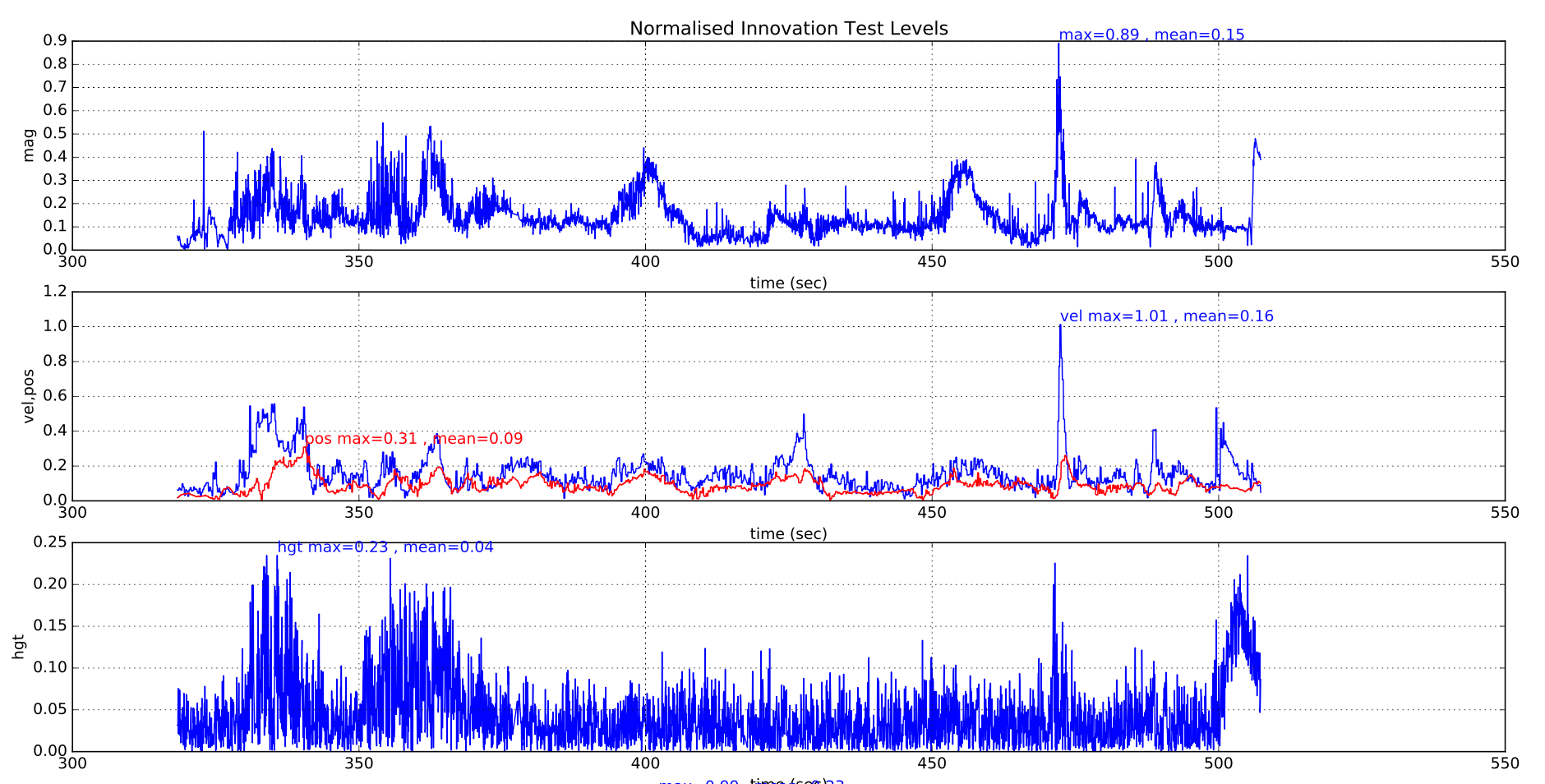
在正常作期间,所有测试比率都应保持在 0.5 以下,只有偶尔会出现高于 0.5 的峰值,如以下示例所示,成功飞行:
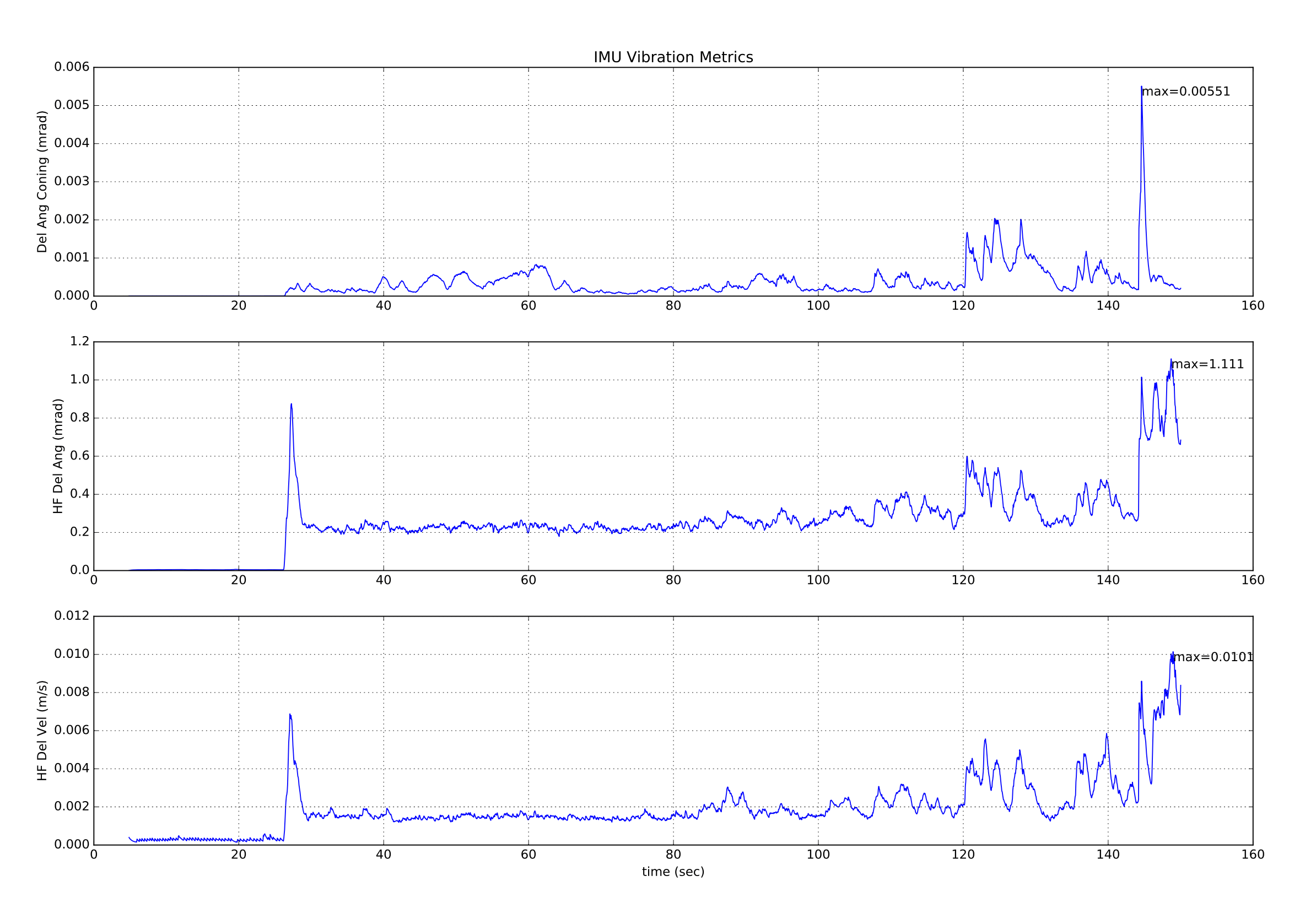
下图显示了具有良好隔离的多旋翼的 EKF 振动指标。 可以看到着陆冲击和起飞和着陆过程中增加的振动。 使用这些指标收集的数据不足,无法提供有关最大阈值的具体建议。
上述振动指标的价值有限,因为在接近 IMU 采样频率(大多数电路板为 1 kHz)的频率下存在振动将导致数据中出现偏移,而这些偏移不会显示在高频振动指标中。 检测混叠误差的唯一方法是它们对惯性导航精度和创新水平提升的影响。
除了生成 > 1.0 的大位置和速度测试比率外,不同的误差机制还以不同的方式影响其他测试比率:
#1、过度振动的测定
高振动水平通常会影响垂直位置和速度新息以及水平分量。 磁力计测试水平仅受到很小程度的影响。
(在此处插入显示不良振动的示例图)
#2、确定过度陀螺仪偏差
较大的陀螺仪偏置偏移通常以飞行过程中增量角偏置值大于 5E-4 (相当于 ~3 度/秒)为特征,如果偏航轴受到影响,也会导致磁力计测试比率大幅增加。 除极端情况外,身高通常不受影响。 只要在飞行前给滤波器时间建立时间,就可以容忍高达 5 度/秒的接通偏置值。 如果位置发散,车长执行的飞行前检查应防止解锁。
(在此处插入显示不良陀螺仪偏差的示例图)
#3、偏航精度差的测定
不良的偏航对准会导致速度测试比在飞机开始移动时迅速增加,因为惯性导航和 GPS 测量计算的速度方向不一致。 磁力计创新受到轻微影响。 身高通常不受影响。
(在此处插入显示不良偏航对齐的示例图)
#4、确定 GPS 精度差
GPS 精度差通常伴随着接收器报告的速度误差的增加以及创新的增加。 由于多径、遮挡和干扰引起的瞬态误差是更常见的原因。 这是一个 GPS 精度暂时丢失的示例,其中多旋翼开始偏离其悬停位置,必须使用摇杆进行校正。 崛起EstimatorStatus (打开新窗口).vel_test_ratio大于 1 表示 GPs 速度与其他测量值不一致,因此被拒绝。
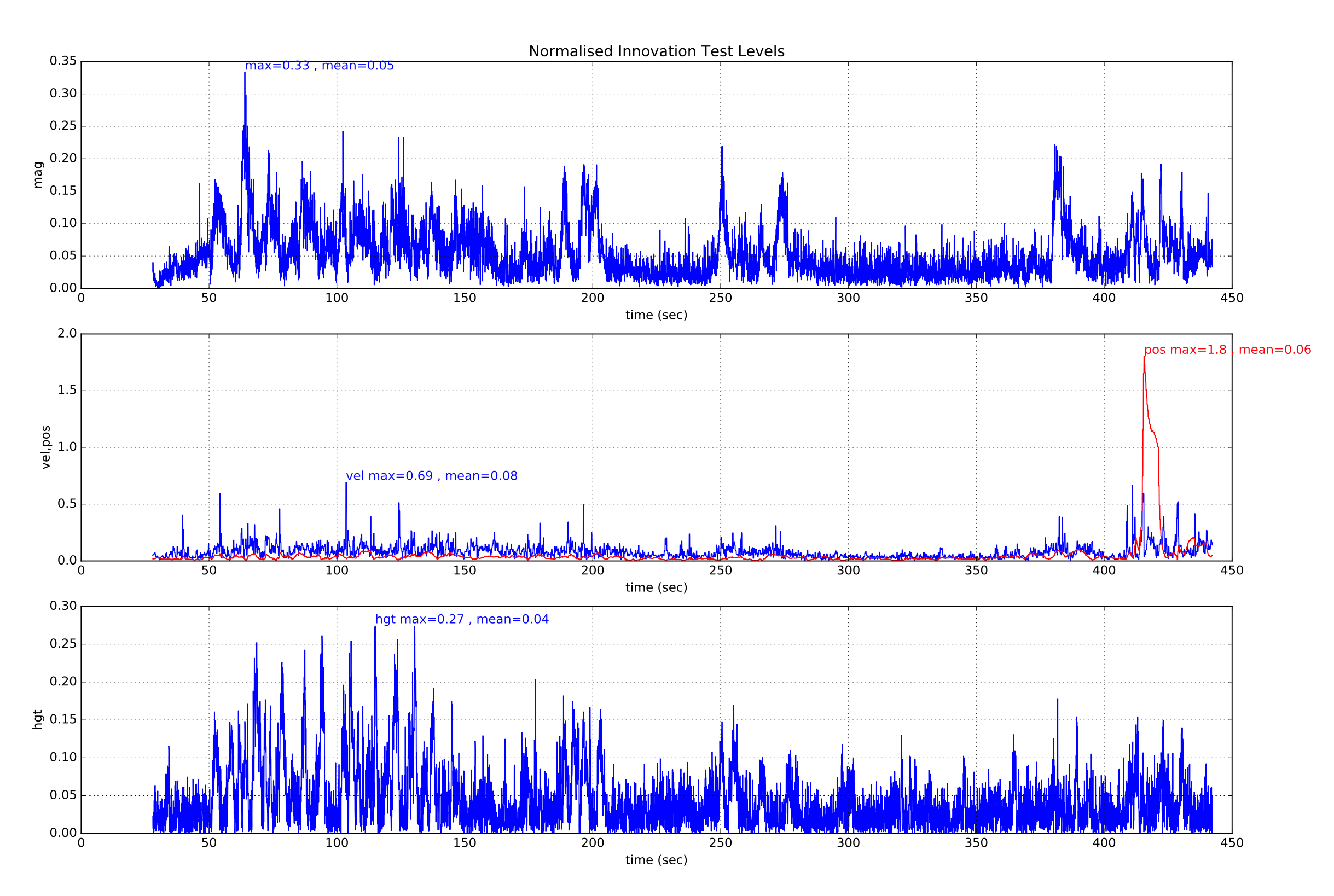
这伴随着 GPS 接收器报告的速度精度的提高,这表明这可能是 GPS 错误。

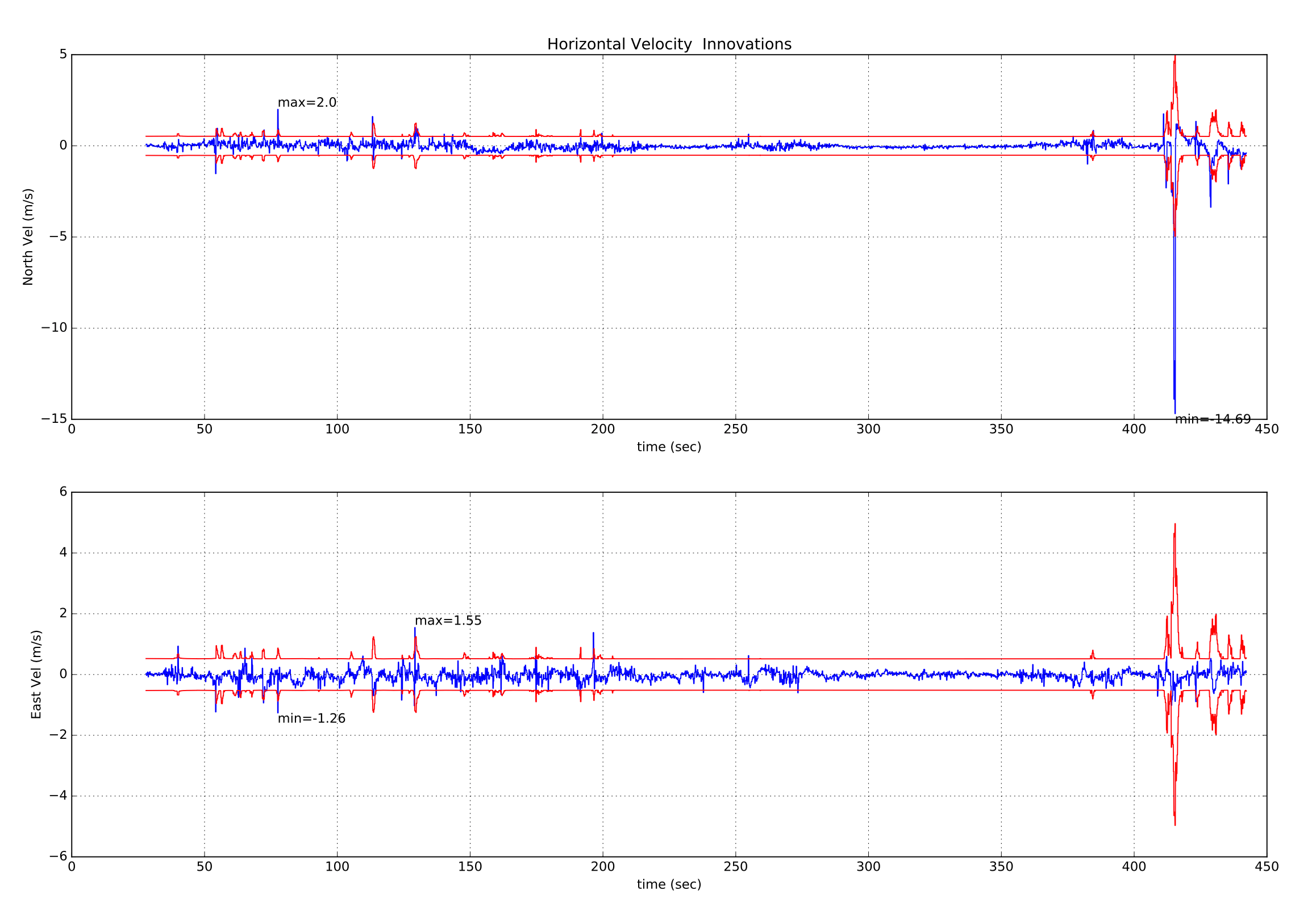
如果我们再看一下 GPS 水平速度新息和创新方差,我们可以看到伴随着这个 GPS"故障"事件而来的北速新息大幅飙升。
#5、确定 GPS 数据丢失
GPS 数据的丢失将由速度和位置新息测试比率"平线"显示。 如果发生这种情况,请检查 中的其他 GPS 状态数据以获取更多信息。vehicle_gps_position
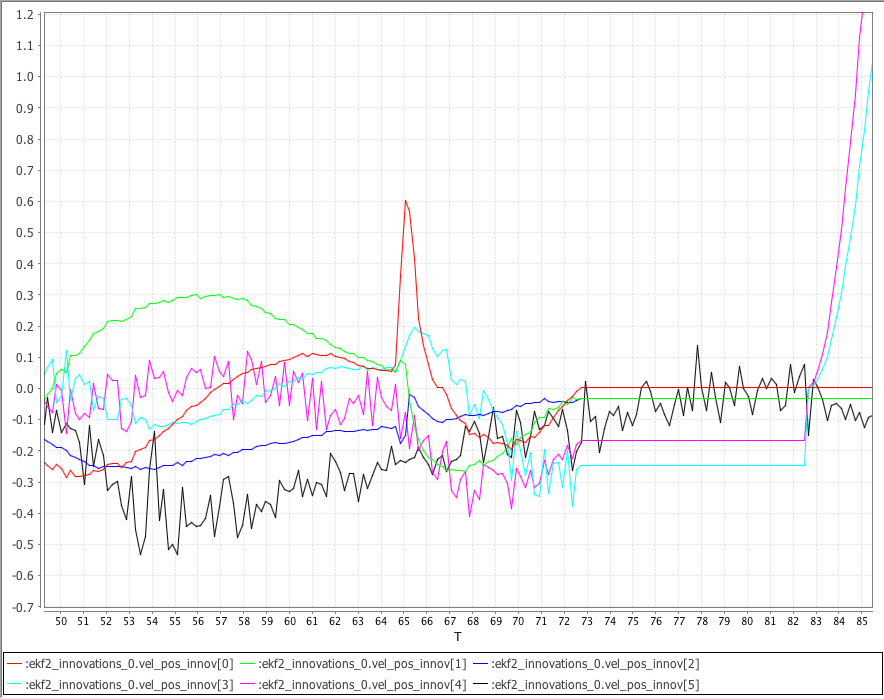
下图显示了使用 SITL Gazebo 模拟 VTOL 飞行生成的 NED GPS 速度新息、GPS NE 位置新息和 Baro 垂直位置新息。ekf2_innovations_0.vel_pos_innov[0 ... 2]``ekf2_innovations_0.vel_pos_innov[3 ... 4]``ekf2_innovations_0.vel_pos_innov[5]
模拟的 GPS 在 73 秒时失去锁定。 请注意,GPS 丢失后 NED 速度新息和 NE 位置新息是"平线"。 请注意,在没有 GPS 数据 10 秒后,EKF 使用最后一个已知位置恢复为静态位置模式,并且 NE 位置新息再次开始变化。
#6、气压计地面效应补偿
如果飞机在着陆过程中有在靠近地面时爬升回空中的趋势,最可能的原因是气压计地面效应。
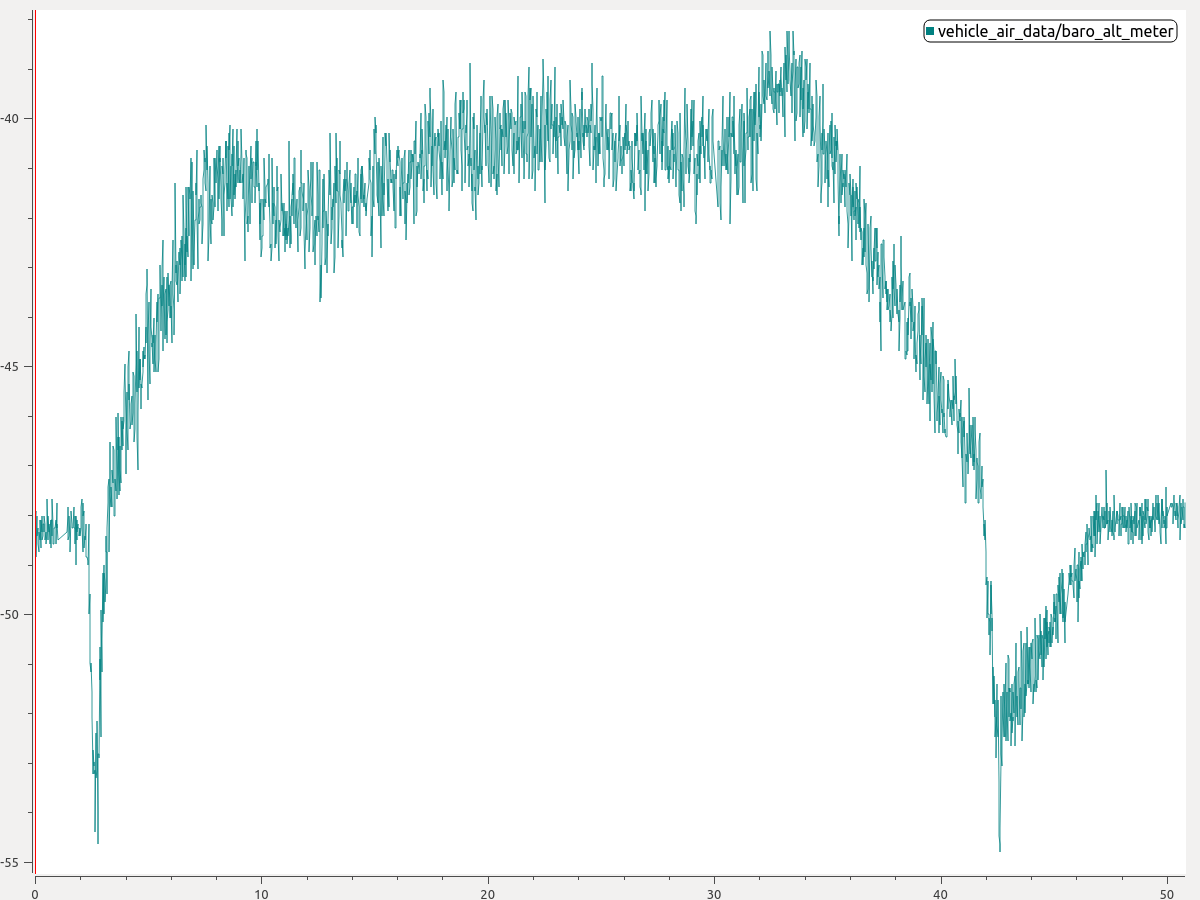
这是当螺旋桨向下推的空气撞击地面并在无人机下方形成高压区时引起的。 结果是压力高度读数较低,导致命令不必要的爬升。 下图显示了存在地面效应的典型情况。 请注意气压计信号在飞行开始和结束时是如何下降的。
您可以启用地效应补偿来解决此问题:
- 根据该图估计起飞或降落期间气压计下降的幅度。在上图中,人们可以读取着陆过程中约 6 米的气压计下降。
- 然后将参数 EKF2_GND_EFF_DZ 设置为该值并添加 10% 的边距。因此,在这种情况下,6.6 米的值将是一个很好的起点。
如果地形估计可用(例如,车辆配备了测距仪),那么您可以额外指定EKF2_GND_MAX_HGT,低于该高度应激活地面效应补偿。 如果没有可用的地形估计,则此参数将不起作用,系统将使用启发式来确定是否应激活地面效应补偿。