就是用模板图 在目标图像 中不断的滑动比较,通过某种比较方法来判断是否匹配成功,找到模板图所在的位置。
-
不会 有边缘填充。
-
类似于卷积,滑动比较,挨个比较象素。
-
返回结果res 大小是:目标图大小-模板图大小+1**(H-h+1,W-w+1)**。
一.匹配方法
res=cv2.matchTemplate(image, templ, method)
-
image:原图像,这是一个灰度图像或彩色图像(在这种情况下,匹配将在每个通道上独立进行)。
-
templ:模板图像,也是灰度图像或与原图像相同通道数的彩色图像。
-
method:匹配方法,可以是以下之一:
-
cv2.TM_CCOEFF
-
cv2.TM_CCOEFF_NORMED
-
cv2.TM_CCORR
-
cv2.TM_CCORR_NORMED
-
cv2.TM_SQDIFF
-
cv2.TM_SQDIFF_NORMED
-
返回值res ,每个元素 表示原图像中相应位置与模板图像匹配的相似度 ,而每个元素的位置 其实就是对应匹配位置 的左上角元素位置。匹配方法不同,返回矩阵的值的含义也会有所区别。以下是几种常用的匹配方法及其返回值含义:
- cv2.TM_SQDIFF 或 cv2.TM_SQDIFF_NORMED:
返回值越接近0 ,表示匹配程度越好。最小值对应的最佳匹配位置。
- cv2.TM_CCORR 或 cv2.TM_CCORR_NORMED:
返回值越大 ,表示匹配程度越好。最大值对应的最佳匹配位置。
- cv2.TM_CCOEFF 或 cv2.TM_CCOEFF_NORMED:
返回值越大 ,表示匹配程度越好。最大值对应的最佳匹配位置。
1.1 平方差匹配(cv2.TM_SQDIFF)
以模板图与目标图所对应的像素值使用平方差公式 来计算,其结果越小 ,代表匹配程度越高。如图:
1.2 归一化平方差匹配(cv2.TM_SQDIFF_NORMED)
与平方差匹配类似,只不过需要将值统一到0到1 ,计算结果越小 ,代表匹配程度越高。如图:
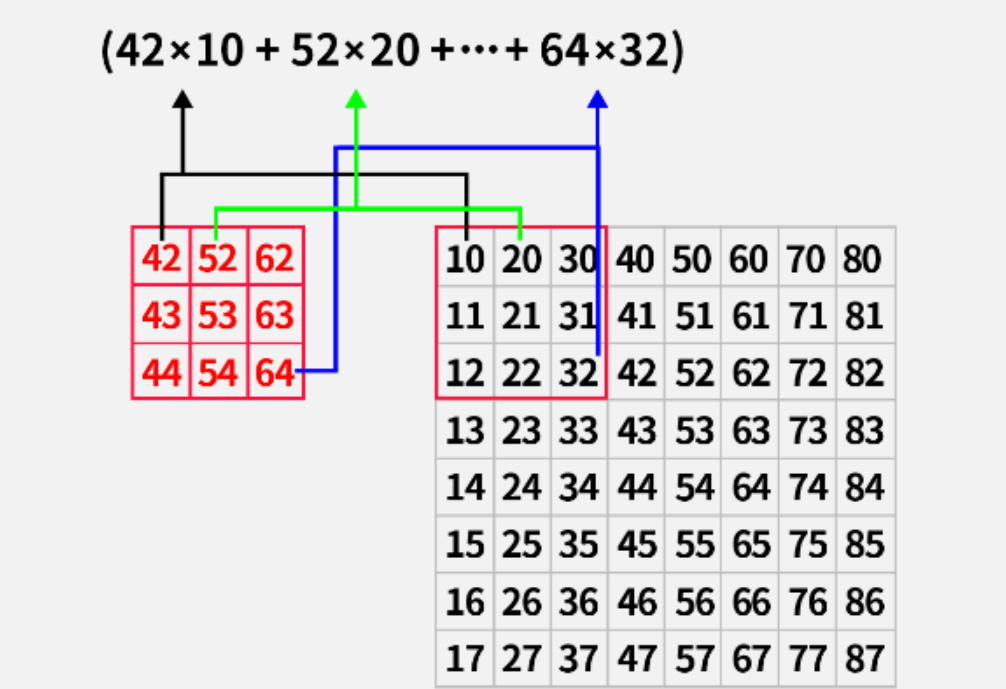
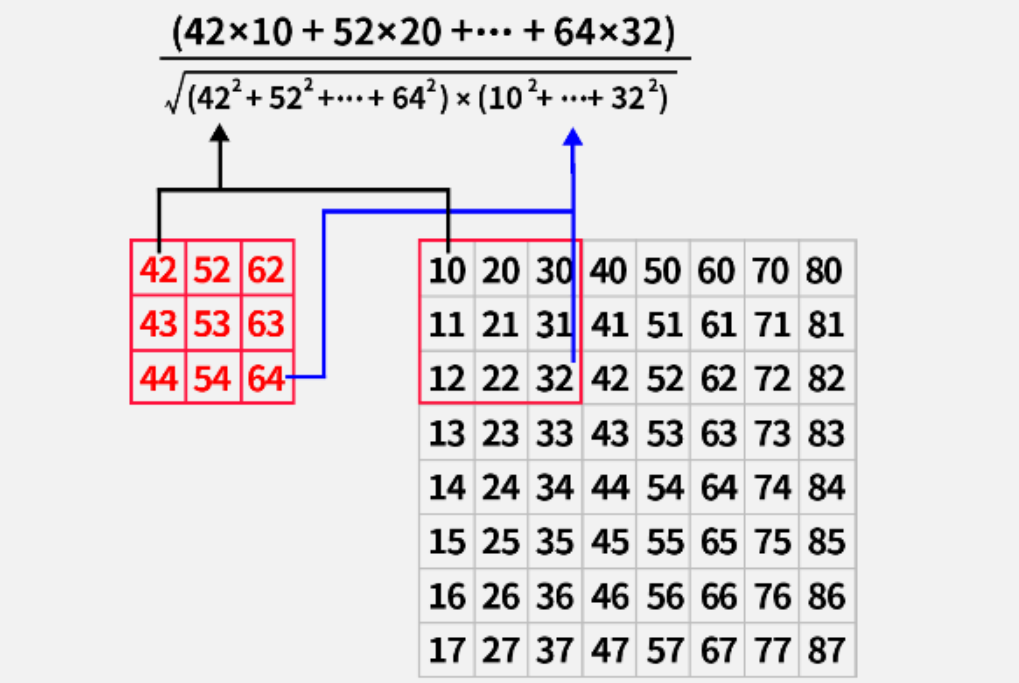
1.3 相关匹配(cv2.TM_CCORR)
使用对应像素的乘积 进行匹配,乘积的结果越大 其匹配程度越高。如图:
1.4 归一化相关匹配(cv2.TM_CCORR_NORMED)
与相关匹配类似,只不过是将其值统一到0到1 之间,值越大 ,代表匹配程度越高。如图:
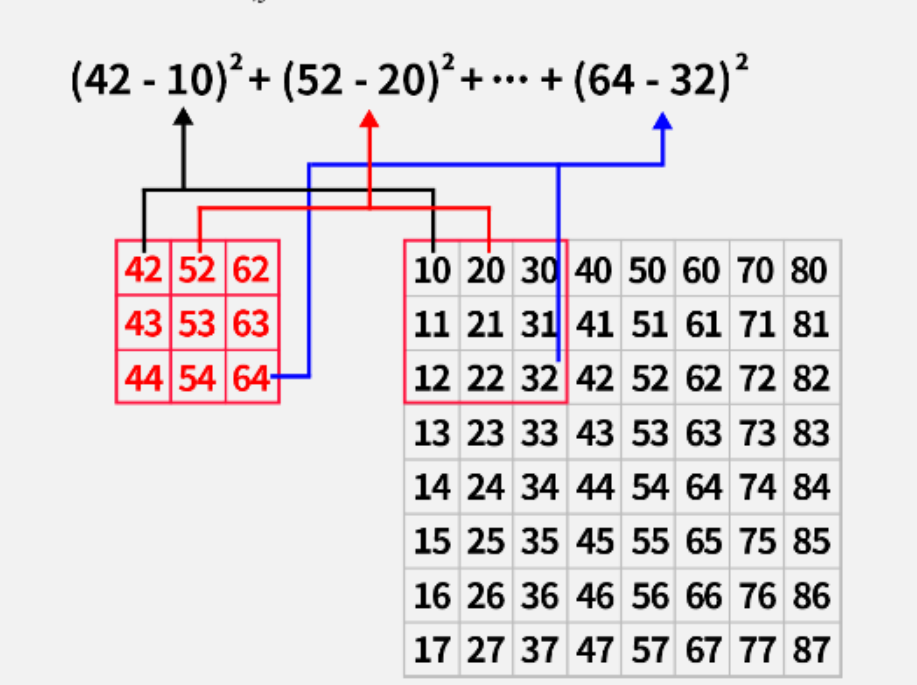
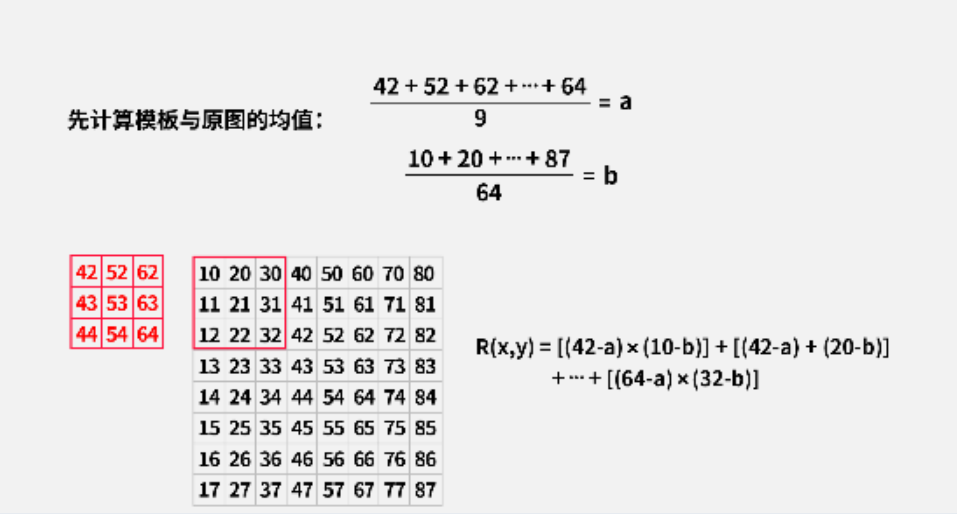
1.5 相关系数匹配(cv2.TM_CCOEFF)
先计算模板 与目标图像 的均值 ,然后通过每个像素与均值之间的差的乘积 再求和 来表示其匹配程度,1表示完美 的匹配,-1表示最差的匹配。如图:
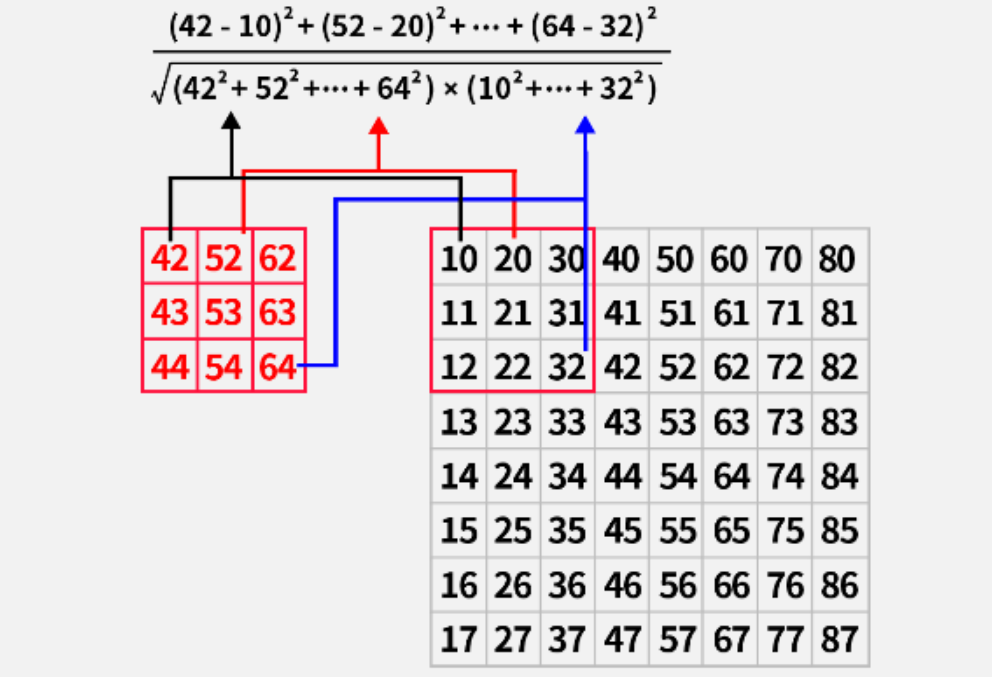
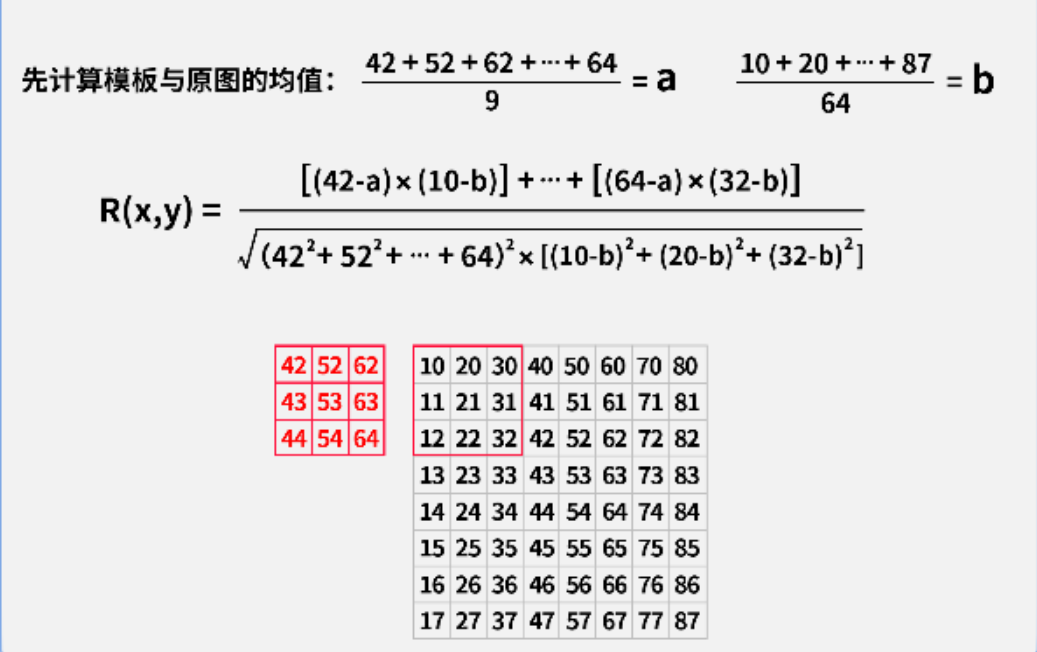
1.6 归一化相关系数匹配(cv2.TM_CCOEFF_NORMED)
将相关系数匹配的结果统一到0到1 之间,值越接近1 代表匹配程度越高。如图:
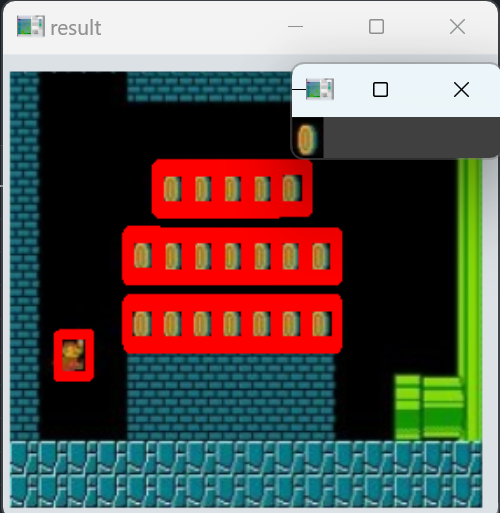
二.绘制轮廓
设定一个匹配阈值 来筛选出多个匹配程度高的区域,找出数组中所有大于0.8的元素索引:
loc=np.where(array > 0.8)
获取轮廓点:
zip(*loc)
-
*loc 是解包操作,将 loc 中的多个数组拆开,作为单独的参数传递给 zip。
-
zip 将这些数组 按元素一一配对,生成一个迭代器 ,每个元素是一个元组 ,表示一个坐标点。
python
import cv2 as cv
import numpy as np
# 导入目标图
img = cv.imread('../images/game.png')
# 导入模板图
temp = cv.imread('../images/temp.png')
# 使用归一化相关系数匹配拿到所有匹配结果的数组
res = cv.matchTemplate(img, temp, cv.TM_CCORR_NORMED)
# 用布尔索引查找满足实际要求的匹配结果
loc = np.where(res >= 0.8)
print(loc)
# 循环获取匹配结果并绘制矩形框
for pt in zip(*loc):
# 因为where函数是对数组操作,先返回行索引再返回列索引,返回的坐标是(y,x)形式,所以需要反转
pt = pt[::-1]
# 绘制矩形框,已经知道loc中坐标是匹配区域左上角的坐标,右下角的坐标用模板图的尺寸加上左上角坐标即可
cv.rectangle(img, pt, (pt[0] + temp.shape[1], pt[1] + temp.shape[0]), (0, 0, 255), 2)
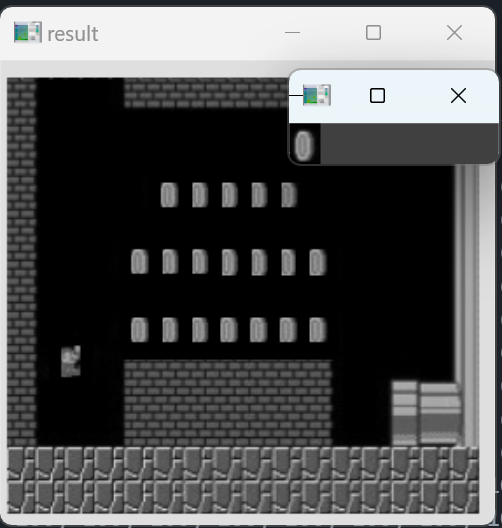
cv.imshow('result', img)
cv.imshow('temp', temp)
cv.waitKey(0)
cv.destroyAllWindows()(array([ 61, 61, 61, 61, 61, 61, 61, 61, 61, 62, 62, 62, 62, 62, 62, 62, 62, 62, 62, 62, 62, 62, 62, 62, 62, 63, 63, 63, 63, 63, 63, 63, 63, 63, 63, 63, 63, 63, 63, 63, 63, 63, 63, 63, 63, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 64, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 65, 66, 66, 66, 66, 66, 66, 66, 66, 66, 66, 66, 66, 66, 66, 66, 66, 66, 66, 66, 66, 67, 67, 67, 67, 67, 67, 67, 67, 67, 67, 67, 67, 67, 67, 68, 68, 68, 68, 99, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 100, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 101, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 102, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 103, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 104, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 105, 106, 106, 106, 106, 106, 106, 106, 106, 106, 106, 106, 106, 106, 106, 106, 138, 138, 138, 138, 138, 138, 138, 138, 138, 138, 138, 139, 139, 139, 139, 139, 139, 139, 139, 139,
...
139, 140, 154, 155, 156, 157, 171, 172, 173, 174, 70, 71, 72, 87, 88, 89, 104, 105, 106, 121, 122, 123, 138, 139, 140, 155, 156, 171, 172, 173, 71, 88, 105, 122, 138, 139, 155, 156, 172, 173, 32, 30, 31, 32, 30, 31, 32, 30, 31]))
这里有一个注意点,那就是将原图灰度化后,是不能使用(b,g,r)三通道颜色赋值的,而黑色很难看出来,所以使用白色(255,255,255)绘制矩形。
python
import cv2 as cv
import numpy as np
# 导入目标图并灰度化
img = cv.imread('../images/game.png', cv.IMREAD_GRAYSCALE)
# 导入模板图并灰度化
temp = cv.imread('../images/temp.png', cv.IMREAD_GRAYSCALE)
# 使用归一化相关系数匹配拿到所有匹配结果的数组
res = cv.matchTemplate(img, temp, cv.TM_CCORR_NORMED)
# 用布尔索引查找满足实际要求的匹配结果
loc = np.where(res >= 0.8)
# 循环获取匹配结果并绘制矩形框
for pt in zip(*loc):
# 因为where函数是对数组操作,先返回行索引再返回列索引,返回的坐标是(y,x)形式,所以需要反转
pt = pt[::-1]
# 绘制矩形框,这里使用了原来的红色框,实际显示为黑色
cv.rectangle(img, pt, (pt[0] + temp.shape[1], pt[1] + temp.shape[0]), (0, 0, 255), 2)
cv.imshow('result', img)
cv.imshow('temp', temp)
cv.waitKey(0)
cv.destroyAllWindows()