Baumer相机如何通过YoloV8深度学习模型实现工厂自动化产线牛奶瓶盖实时装配的检测识别(C#代码UI界面版)
- 工业相机使用YoloV8模型实现工厂自动化产线牛奶瓶盖实时装配的检测识别
- 工业相机通过YoloV8模型实现工厂自动化产线牛奶瓶盖实时装配的检测识别的技术背景
- 在相机SDK中获取图像转换图像的代码分析
- 源码下载链接
- 工业相机通过YoloV8模型实现工厂自动化产线牛奶瓶盖实时装配的检测识别的行业应用
- 关键技术细节
工业相机使用YoloV8模型实现工厂自动化产线牛奶瓶盖实时装配的检测识别
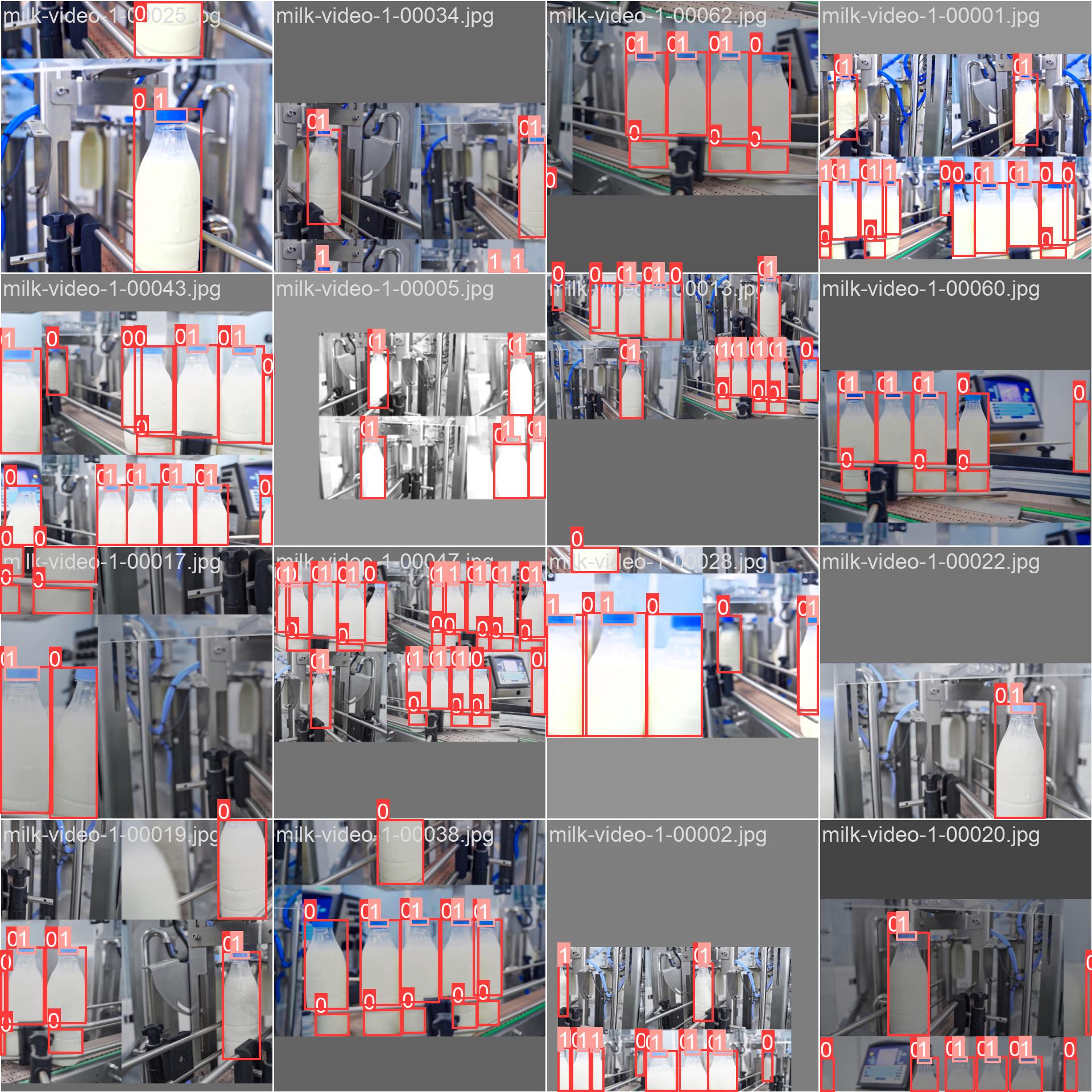
本项目集成了 YOLOv8 检测模型 与 C#图形界面工具,实现了包括图片、文件夹、视频与摄像头等多种输入方式的实现工厂自动化产线牛奶瓶盖实时装配的检测识别。
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有快速数据传输、低功耗、易于集成以及高度可扩展性等特点。
Baumer工业相机由于其性能和质量的优越和稳定,常用于高速同步采集领域,通常使用各种图像算法来提高其捕获的图像的质量。
本文以Baumer工业相机作为案例进行演示,实现将工业相机的图像或者本地图像夹导入Yolo模型从而实现工厂自动化产线牛奶瓶盖实时装配的检测识别等功能。
工业相机通过YoloV8模型实现工厂自动化产线牛奶瓶盖实时装配的检测识别的技术背景
本文通过C#中实现一个简单的UI界面,用于将YoloV8模型实现工厂自动化产线牛奶瓶盖实时装配的检测识别。
生产作业流程合规检测算法通过引入yolov8视觉数据智能分析技术,生产作业流程合规检测算法对生产操作流程进行实时监测和合规性检测,通过与预设标准进行比对,系统能够检测出不合规的操作或异常情况,并及时发出警报提示相关人员采取措施。
用户可以通过该界面执行以下操作:
-
转换相机图像为Mat图像:通过YoloV8模型实现工厂自动化产线牛奶瓶盖实时装配的检测识别
-
转换本地图像为mat图像:通过YoloV8模型实现工厂自动化产线牛奶瓶盖实时装配的检测识别
通过这个UI界面,用户能够在实时应用机器视觉数据处理时快速有效地进行操作,无需深入了解图像数据的底层处理过程。这个简单的介绍旨在为开发人员提供一个明确的方向,以便开始构建此类应用程序,并且该程序主要用于演示目的。
在相机SDK中获取图像转换图像的代码分析
本文介绍使用Baumer工业相机,实现将图像转换为Bitmap图像,再转换Mat图像,导入到Yolo模型进行推理,输出实现工厂自动化产线牛奶瓶盖实时装配的检测识别的结果。
工业相机图像转换Bitmap图像格式和Mat图像重要核心代码
csharp
//将相机内部图像内存数据转为bitmap数据
System.Drawing.Bitmap bitmap = new System.Drawing.Bitmap((int)mBufferFilled.Width, (int)mBufferFilled.Height,(int)mBufferFilled.Width,System.Drawing.Imaging.PixelFormat.Format8bppIndexed, (IntPtr)((ulong)mBufferFilled.MemPtr + mBufferFilled.ImageOffset));
#region//Mono图像数据转换。彩色图像数据转换于此不同
System.Drawing.Imaging.ColorPalette palette = bitmap.Palette;
int nColors = 256;
for (int ix = 0; ix < nColors; ix++)
{
uint Alpha = 0xFF;
uint Intensity = (uint)(ix * 0xFF / (nColors - 1));
palette.Entries[ix] = System.Drawing.Color.FromArgb((int)Alpha, (int)Intensity,(int)Intensity, (int)Intensity);
}
bitmap.Palette = palette;
#endregion
string strtime = DateTime.Now.ToString("yyyyMMddhhmmssfff");
string saveimagepath = pImgFileDir + "\\" + strtime + ".brw";
//使用Bitmap格式保存
bitmap.Save(saveimagepath, System.Drawing.Imaging.ImageFormat.Bmp);
//用bitmap转换为mat
OpenCvSharp.Mat Matgray1 = OpenCvSharp.Extensions.BitmapConverter.ToMat(bitmap);本地文件图像转换Bitmap图像格式和Mat图像重要核心代码
C#环境下代码如下所示:
csharp
if (imagePaths.Count() == 0)
{
LoadImagePaths("test_img");
}
string currentImagePath = imagePaths[currentImageIndex];
// 显示到pictureBoxA
pictureBoxA.Image.Dispose(); // 释放上一张图片资源,避免内存泄漏
pictureBoxA.Image = new Bitmap(currentImagePath);
image_path = currentImagePath;
currentImageIndex = (currentImageIndex + 1) % imagePaths.Count;
OnNotifyShowRecieveMsg("检测中,请稍等......");
//textBox1.Text = "检测中,请稍等......";
//pictureBox2.Image = null;
Application.DoEvents();
image = new Mat(image_path);
float ratio = Math.Min(1.0f * inpHeight / image.Rows, 1.0f * inpWidth / image.Cols);
int neww = (int)(image.Cols * ratio);
int newh = (int)(image.Rows * ratio);
Mat dstimg = new Mat();
Cv2.Resize(image, dstimg, new OpenCvSharp.Size(neww, newh));
Cv2.CopyMakeBorder(dstimg, dstimg, 0, inpHeight - newh, 0, inpWidth - neww, BorderTypes.Constant);Mat图像导入YoloV8模型重要核心代码
C#环境下代码如下所示:
csharp
// 定义 ONNX 模型的路径
string onnxModelPath = "model/BottleCap_detection.onnx";
// 定义输入图像的形状
OpenCvSharp.Size inputShape = new OpenCvSharp.Size(640, 640);
// 从 ONNX 模型文件加载网络
if(net==null)
net = CvDnn.ReadNetFromOnnx(onnxModelPath);
string[] modelClassify = {"Bottle","NO_Bottle_Cap"};
if (imagePaths.Count() == 0)
{
LoadImagePaths("test_img");
}
string currentImagePath = imagePaths[currentImageIndex];
// 显示到pictureBoxA
pictureBoxA.Image.Dispose(); // 释放上一张图片资源,避免内存泄漏
pictureBoxA.Image = new Bitmap(currentImagePath);
image_path = currentImagePath;
if (pictureBoxA.Image == null)
{
return;
}
currentImageIndex = (currentImageIndex + 1) % imagePaths.Count;
OnNotifyShowRecieveMsg("检测中,请稍等......");
Application.DoEvents();
image = new Mat(image_path);
dt1 = DateTime.Now;
// 调用识别图像的函数,并传入图像路径、阈值、网络、输入形状和分类类别列表
//result_image = Recognize(image, 0.35, net, inputShape, modelClassify);
result_image = RecognizeMat(image, 0.35, net, inputShape, modelClassify);
// 获取计算结束时间
dt2 = DateTime.Now;
// 显示输出的图像
pictureBoxA.Image = new Bitmap(result_image.ToMemoryStream());
// 显示推理耗时时间
OnNotifyShowRecieveMsg("推理耗时:" + (dt2 - dt1).TotalMilliseconds + "ms");
csharp
static Mat RecognizeMat(Mat imgInput, double threshold, Net net, OpenCvSharp.Size inputShape, string[] modelClassify)
{
using (Mat img = imgInput)
{
int inpHeight = inputShape.Height; // 输入图像的高度
int inpWidth = inputShape.Width; // 输入图像的宽度
// 对图像进行预处理,调整尺寸
Mat image = img;
float ratio = Math.Min(1.0f * inpHeight / image.Rows, 1.0f * inpWidth / image.Cols);
int neww = (int)(image.Cols * ratio);
int newh = (int)(image.Rows * ratio);
//// 将图像调整为模型需要的大小
//Mat dstimg = new Mat();
//Cv2.Resize(image, dstimg, new OpenCvSharp.Size(neww, newh));
//Cv2.CopyMakeBorder(dstimg, dstimg, 0, inpHeight - newh, 0, inpWidth - neww, BorderTypes.Constant);
//Mat BN_image = CvDnn.BlobFromImage(dstimg); // 将调整后的图像转换为Blob格式
//// 配置图片输入数据 // 将 blob 设置为网络的输入
//net.SetInput(BN_image);
//// 从图像生成用于网络输入的 blob
//Mat blob = CvDnn.BlobFromImage(img, 1 / 255.0, inputShape, new Scalar(0, 0, 0), false);
////Mat blob = CvDnn.BlobFromImage(img, 1.0 / 255.0, inputShape, new Scalar(0, 0, 0), true, false);
// 将 blob 设置为网络的输入
//net.SetInput(blob);
//// 从图像生成用于网络输入的 blob
Mat img0 = img;
Mat blob0 = CvDnn.BlobFromImage(img0, 1 / 255.0, new OpenCvSharp.Size(inputShape.Width, inputShape.Height), swapRB: true, crop: false);
net.SetInput(blob0);
// 执行前向传播获取输出
Mat output = net.Forward();
// 此处可能需要根据 C# 中 OpenCV 的特性来处理转置操作
output = ReshapeAndTranspose(output);
// 获取图像的行数(高度)
int height = img.Height;
// 获取图像的列数(宽度)
int width = img.Width;
// 计算宽度的缩放因子
double xFactor = (double)width / inputShape.Width;
// 计算高度的缩放因子
double yFactor = (double)height / inputShape.Height;
// 初始化分类类别、得分和检测框的列表
List<string> classifys = new List<string>();
List<float> scores = new List<float>();
List<Rect> boxes = new List<Rect>();
List<Double> maxVales = new List<Double>();
List<OpenCvSharp.Point> maxloces = new List<OpenCvSharp.Point>();
// 遍历输出的行
for (int i = 0; i < output.Rows; i++)
{
// 获取当前行的检测框数据
using (Mat box = output.Row(i))
{
// 在框数据的特定范围中找到最小值、最大值及其位置
OpenCvSharp.Point minloc, maxloc;
double minVal, maxVal;
// Mat classes_scores = box.ColRange(4, 5);//GetArray(i, 5, classes_scores);
// double curmates0 = box.At<float>(0);
double curmates1 = box.At<float>(4);
int collength = box.Cols;
int rowlength = box.Rows;
Mat curmates = box.ColRange(4, box.Cols);
//Cv2.MinMaxLoc(box.ColRange(4, box.Cols), out minVal, out maxVal, out minloc, out maxloc);
Cv2.MinMaxLoc(box.ColRange(4, box.Cols), out minVal, out maxVal, out minloc, out maxloc);
int classId = maxloc.Y;
if (classId == 0)
{
// 获取对应类别的得分
float score = (float)maxVal;
// 如果得分大于阈值
if (score > threshold)
{
// 将得分添加到得分列表
scores.Add(score);
// 将类别添加到类别列表
classifys.Add(modelClassify[classId]);
// 获取框的原始坐标
float x = box.At<float>(0, 0);
float y = box.At<float>(0, 1);
float w = box.At<float>(0, 2);
float h = box.At<float>(0, 3);
// 计算调整后的坐标
int xInt = (int)((x - 0.5 * w) * xFactor);
int yInt = (int)((y - 0.5 * h) * yFactor);
int wInt = (int)(w * xFactor);
int hInt = (int)(h * yFactor);
// 将调整后的框坐标添加到框列表
boxes.Add(new Rect(xInt, yInt, wInt, hInt));
}
}
}
}
// 执行非极大值抑制操作
int[] indices;
CvDnn.NMSBoxes(boxes, scores, 0.25f, 0.45f, out indices);
// 遍历非极大值抑制操作后的索引
foreach (int i in indices)
{
// 获取对应的类别、得分和框
string classify = classifys[i];
float score = scores[i];
Rect box = boxes[i];
// 获取框的坐标和尺寸
// 在图像上绘制矩形框
Cv2.Rectangle(img, box, new Scalar(0, 255, 0), 3);
// 生成类别和得分的标签文本
string label = $"{classify}: {score:F2}";
// 在图像上添加标签文本
Cv2.PutText(img, label, new OpenCvSharp.Point(box.X, box.Y - 10), HersheyFonts.HersheySimplex, 0.5, new Scalar(0, 255, 0), 2);
}
// 将图像复制输出返回
Mat result_image0 = img.Clone();
return result_image0;
// 将处理后的图像保存为文件
// Cv2.ImWrite("result.jpg", img);
}
}代码实现演示(实现工厂自动化产线牛奶瓶盖实时装配的检测识别)
源码下载链接
C# WinForms工业相机+本地图像 通过YoloV8深度学习模型实现工厂自动化产线牛奶瓶盖实时装配的检测识别 源码
工业相机通过YoloV8模型实现工厂自动化产线牛奶瓶盖实时装配的检测识别的行业应用
工业相机 + YOLOv8 实现「牛奶瓶盖实时装配检测」行业应用速览
(基于 2024-2025 年公开源码、论文与项目)
| 场景 | 业务痛点 | 工业相机配置 | YOLOv8 技术方案 & 现场效果 | 一键资源 |
|---|---|---|---|---|
| ① 高速灌装线 | 瓶盖歪斜、缺盖、混色,人工抽检漏检 | 4K 全局快门 120 fps + 环形 LED | YOLOv8-FEMA(FasterNet+EMA),模型 3.2 MB,Jetson Orin Nano 15 ms/帧,NG 检出率 99.4 % | 广东省科学院论文 + 源码 |
| ② 产线零延迟闭环 | 检测结果需实时反馈 PLC 剔除 | 2 MP 工业相机 + Modbus TCP/IP | YOLOv8 + PLC 梯形图,响应延迟 < 25 ms,分拣速度提升 275 % | e-com-net 实战案例 |
| ③ 红色瓶盖专检 | 颜色误检、光照不均 | 5 MP 彩色相机 + 条形光源 | 红色瓶盖专用 YOLOv8 权重,mAP 97 %,C# WinForms UI 一键部署 | CSDN 源码 + 数据集 |
| ④ 智慧工厂监控 | 多工位同时检测,需大屏可视化 | 8 K 线阵相机阵列 + 边缘 GPU | YOLOv8 + PySide6 UI,实时画面 + 缺陷统计,零漏检 | CSDN 监控系统 |
关键技术细节
模型 :采用改进 YOLOv8-FEMA(FasterNet Block + EMA 注意力),参数量减少 27 %,检测精度提升 3 %。
部署 :INT8 量化后 3-5 MB,可跑在 Jetson Orin Nano / RK3588;X86 + RTX 3060 8 路并发 <30 W。
闭环 :检测结果通过 Modbus / OPC-UA 实时写入 PLC,驱动气吹或机械手剔除 NG 品,响应 <25 ms。
合规:原始图像 24 h 自动覆盖,仅留缺陷日志 CSV,符合《数据安全法》。