一、齐次坐标是什么?
齐次坐标是一种用 N+1维向量表示N维空间中的点或向量 的数学工具。例如,3D笛卡尔坐标系中的点 (x,y,z)在齐次坐标系中会被扩展为四维向量 (x,y,z,w),其中 w 是比例因子(通常设为1)。
其核心特性包括:
- 统一性 :通过引入第四维分量 w,齐次坐标可以统一表示点、向量以及无穷远点:
- 当 w=1 时,四维坐标 (x,y,z,1) 对应3D点 (x,y,z);
- 当 w=0 时,四维坐标 (x,y,z,0) 表示向量或无穷远点(如平行线的交点) 。
- 比例不变性:齐次坐标允许通过缩放所有分量表示同一个点,例如 (2,4,6,2) 和 (1,2,3,1)对应同一个3D点 (1,2,3)。
二、为什么3DGS需要将3D点转换为齐次坐标?
在3DGS等图形学应用中,齐次坐标的核心价值在于 通过4x4矩阵统一表示所有几何变换,具体原因如下:
1. 统一仿射变换的数学表达
- 笛卡尔坐标的局限性:在普通3D坐标中,平移变换需用向量加法(如 x′=x+tx),而旋转和缩放是矩阵乘法。这种混合操作无法通过单一矩阵统一描述。
- 齐次坐标的矩阵统一性 :引入齐次坐标后,平移、旋转、缩放等变换均可表示为4x4矩阵乘法:
- 平移矩阵:
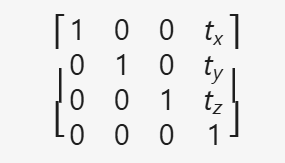
-
- 旋转/缩放矩阵:
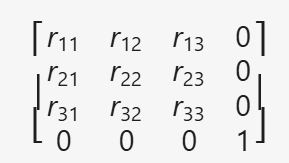
这种统一性允许通过矩阵连乘实现复杂的组合变换(如先旋转再平移)。
2. 支持透视投影与相机模型
在3DGS中,场景需要投影到2D图像平面(如渲染过程):
- 透视投影的数学需求:透视变换是非线性的(物体近大远小),而齐次坐标通过4x4矩阵可编码透视投影参数(如视场角、近远裁剪面),最终通过齐次除法(x/w,y/w,z/w)将点映射到标准化的设备坐标系。
- 相机位姿建模:相机的位置和朝向变换(如从世界坐标系到相机坐标系)可通过齐次矩阵一次性完成,无需分步计算平移和旋转。
3. 计算效率与代码简洁性
- 批量处理点云:在3DGS中,场景可能包含数百万个点(形状为P, 3),转换为齐次坐标P, 4后,所有变换操作均可通过矩阵乘法实现,便于GPU并行加速。
- 避免条件分支:齐次坐标的固定维度消除了对点和向量的特殊处理(如平移仅作用于点),简化代码逻辑。
三、实际案例:3DGS中的坐标变换流程
假设3DGS需要对场景中的点云进行旋转、平移和透视投影:
- 输入数据:原始点云为P, 3的笛卡尔坐标。
- 转换为齐次坐标:添加第四维 w=1,得到P, 4的齐次坐标。
- 应用变换矩阵 :
- 通过4x4矩阵组合旋转和平移;
- 投影矩阵将3D点映射到2D屏幕空间。
- 齐次除法:将结果坐标的 x,y,z 分量除以 w,得到最终的归一化坐标。
四、总结
齐次坐标通过 增加第四维度 和 统一矩阵运算,解决了笛卡尔坐标无法统一表示仿射变换的问题,特别是在处理平移和投影时。在3DGS中,这种表示方法能够简化数学运算,提高计算效率,并支持复杂的变换组合,使得场景重建和渲染更加高效和灵活。