目录
一、串口通信协议
在学习网络通信的时候,我们曾认识到两台主机想要进行通信,必须要有协议的存在,否则对方根本不知道你说了啥,因为在网络中没有信息的概念,只有二进制电平信号。如果不规定协议,对方的操作系统就不知道如何解析该二进制信号。于是演变出来OSI的7层模型,每一层都相当于一层协议,对数据包进行封装,从而让对方的同层协议可以解析提取真正想要的数据。
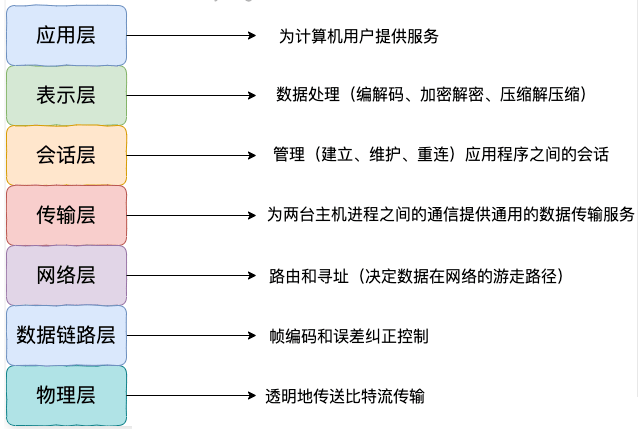
**那么我们STM32单片机自然也可以认为属于网络协议中的物理层协议。**因为他并没有经过交换机路由器等设备,仅仅只是把两台主机直连,所以他并不可能在数据链路层、或者网络层。但是也有人认为他属于数据链路层,以为他有数据帧封装,尽管这个封装十分简单。而且他没有mac地址其实是因为他没有负责的连接环境,但是本质上他这个简单的协议是可以做到传输mac地址的。其实这种理解也是有道理的,因为规定上物理层没有任何协议存在,是单纯的数据流传输。
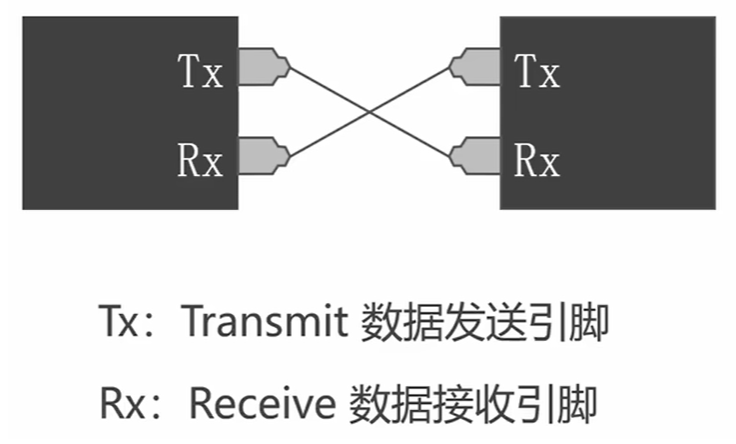
真实的物理连接图:
正是因为它属于物理层协议,那么可以预见的是他的协议必然很简单。我们来看看他的协议格式:
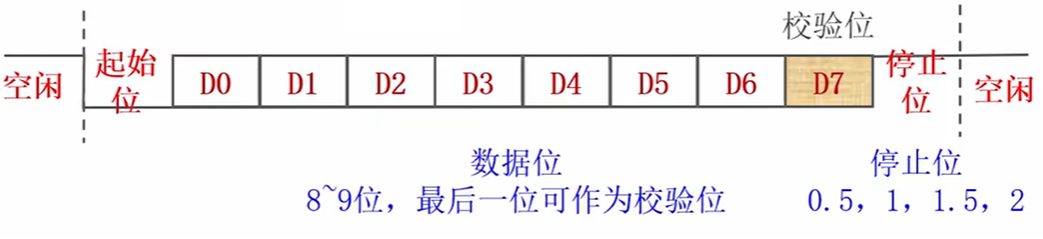
它的协议格式非常简单,由一位低电平起始位+7-8位数据位+(一位校验位)+一位高电平停止位组成。
其中这里的数据位为7-8位是可以选择的,不过我们一般都是要传递一个字节,所以一般情况下只会选择8位数据位,至于校验位,如果你的精确度要求高可以选择,通常来说并无较大差异。
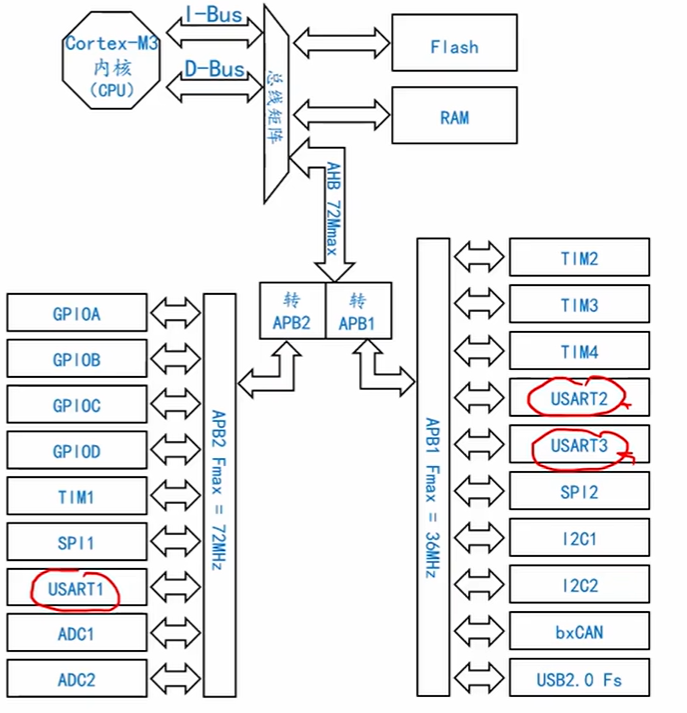
二、USART模块介绍
在结构图中可以看到UART有三个,APB1和APB2线上都存在。可以根据你对时钟频率的不同选取。
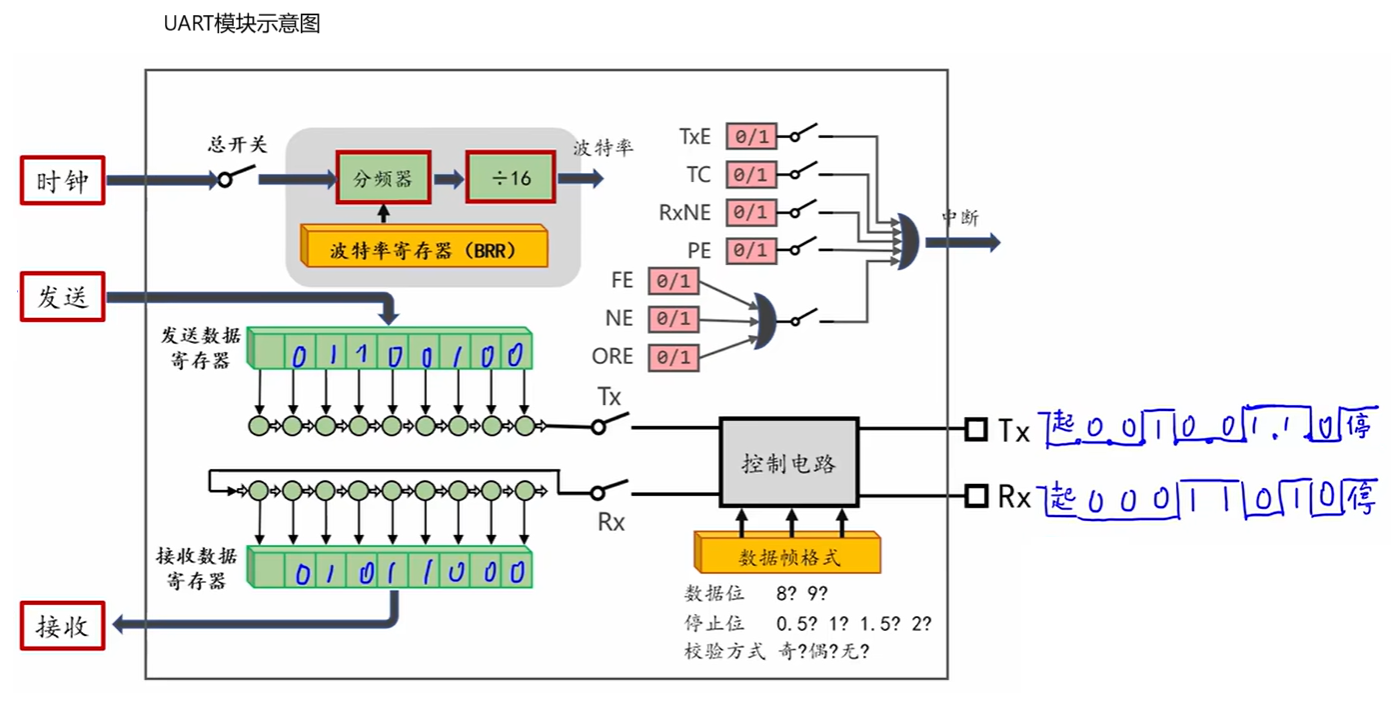
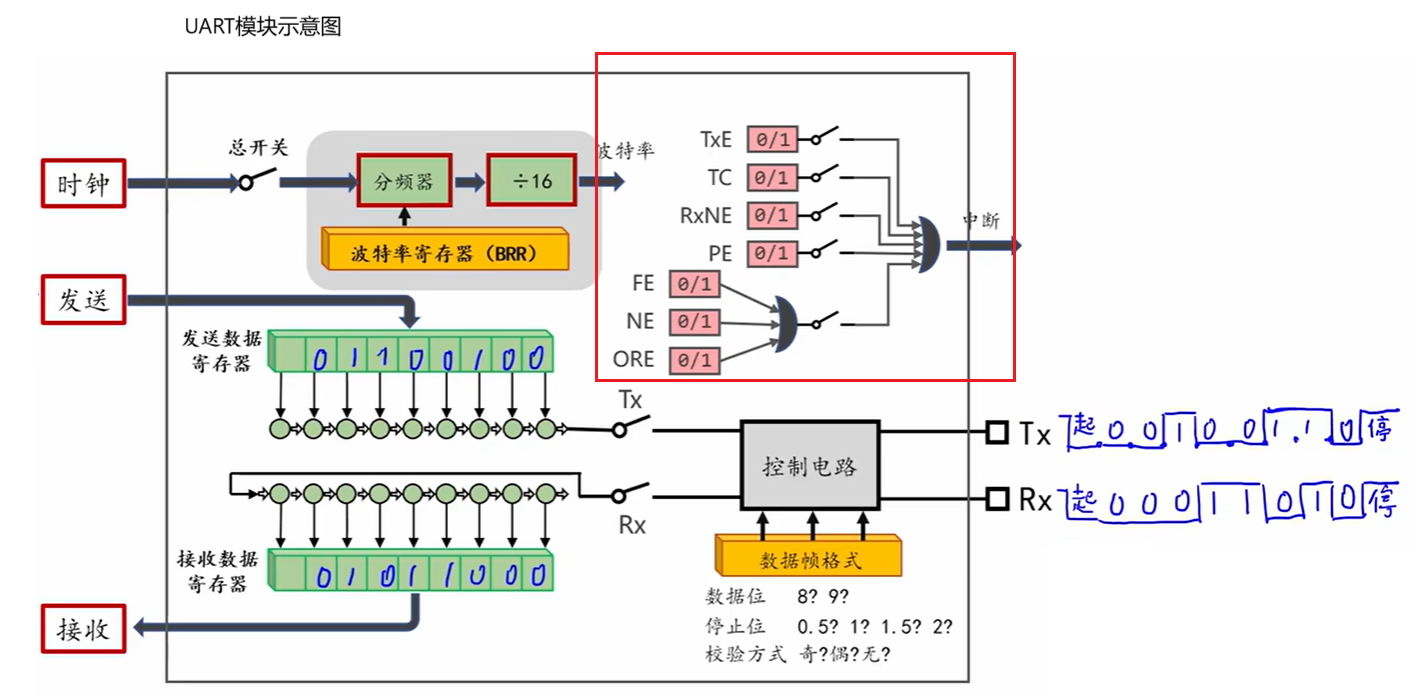
(1)移位寄存器
在这幅图中有两个移位寄存器,他的作用就是接收和发送数据。
当我们想要发送数据的时候,就把值填入发送寄存器。之后该模块会自动把该寄存器的数据在时钟的频率下,一位位得把数据的二进制流交给控制电路。
反过来,接收数据的时候,是先交给到了控制电路,控制电路对接收到的数据帧,进行解包(去除起始位、停止位、并检验校验位是否正确),把数据取出交给接收寄存器,然后由该寄存器把数据向上传递即可。
在这个过程中两个寄存器的作用主要是串转并、并转串。因为在物理线路中的传递都是二进制流的串行数据,而用户想看到的则是8位一起的并行数据。
(2)控制电路
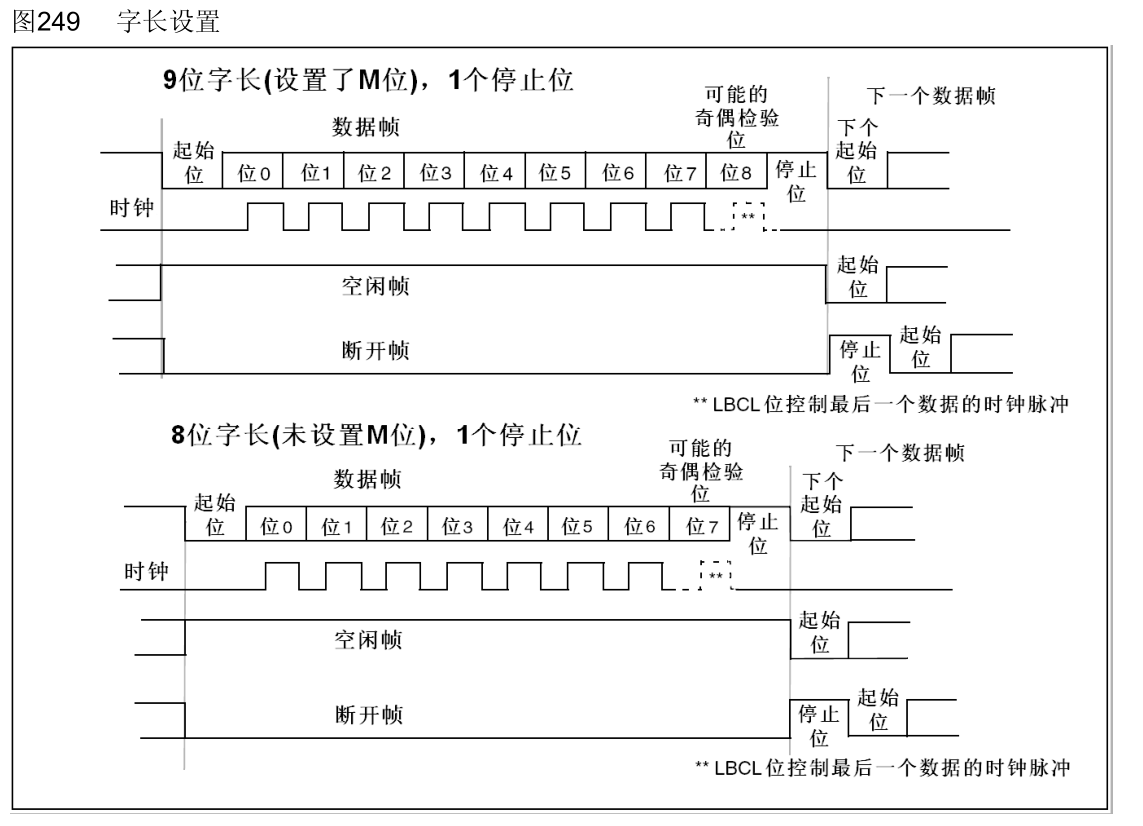
控制电路主要就是进行封包和解包分用的。在这里可以通过配置寄存器来决定数据包的格式:数据位是7位还是8位?有没有校验位?、停止位是多少个时钟周期的高电平?
(3)波特率
波特率指的是一分钟的时间,比特位传输的数量。比如你的串口选择的波特率是9600,那么他一分钟能传递的比特位就是9600个,即9600/8=1200个字节。大多数情况下波特率都会被配置成9600、115200、921600,这个和时钟的频率有关,尽可能选择可以由时钟频率直接分频得到的,精确度较高。
在这幅图中,波特率是由时钟经过波特率寄存器BRR和一个16分频的分频器得到的。因为STM32的时钟频率往往是36、72MHz比较大,经过这些分频降低频率更好用。不过如果你对数据的传输时间限制很短,可以尝试较高的频率。
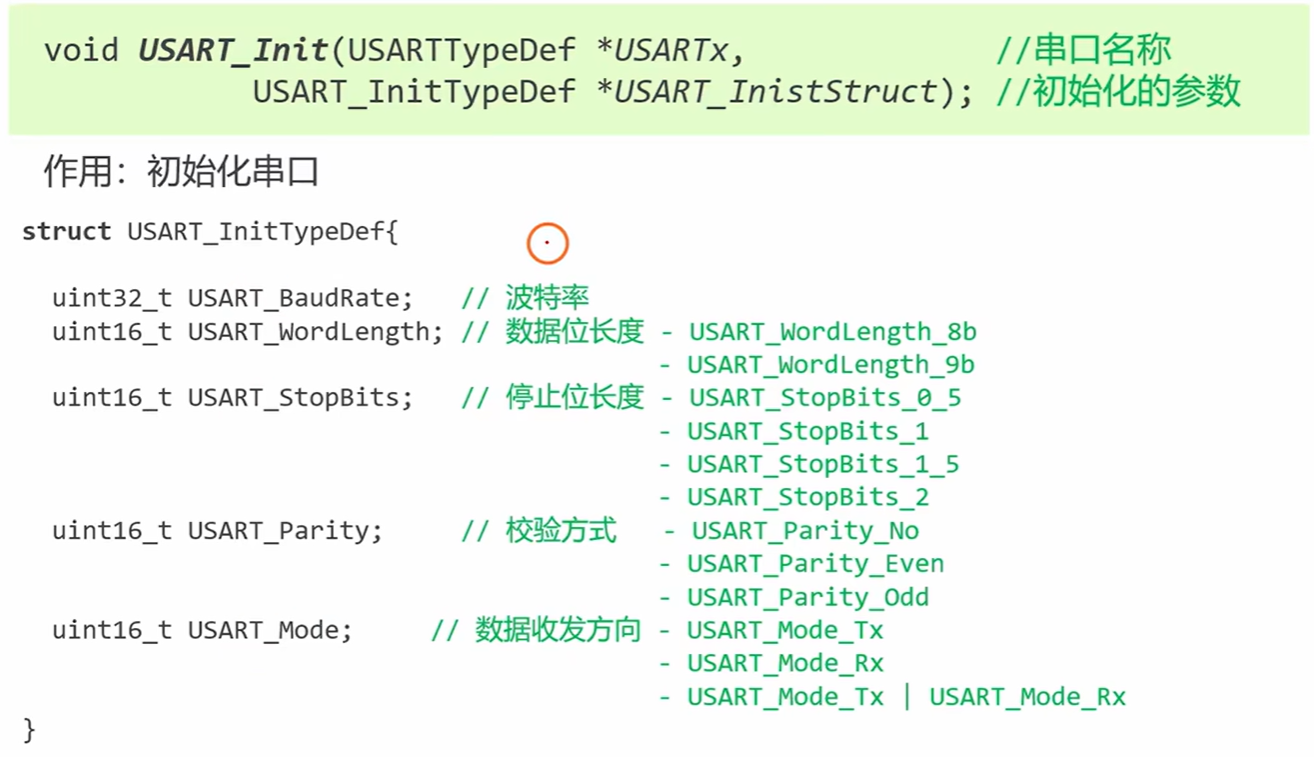
(4)C语言接口
在库函数中可以找到一个USART_Init,他就是用来配置UART(上述)模块的函数。可以在这里设置波特率、数据位长度、校验方式、接收还是发送数据等。
当然还需要一个时钟总开关使能
cpp
USART_Cmd(USART1,ENABLE);//使能USART模块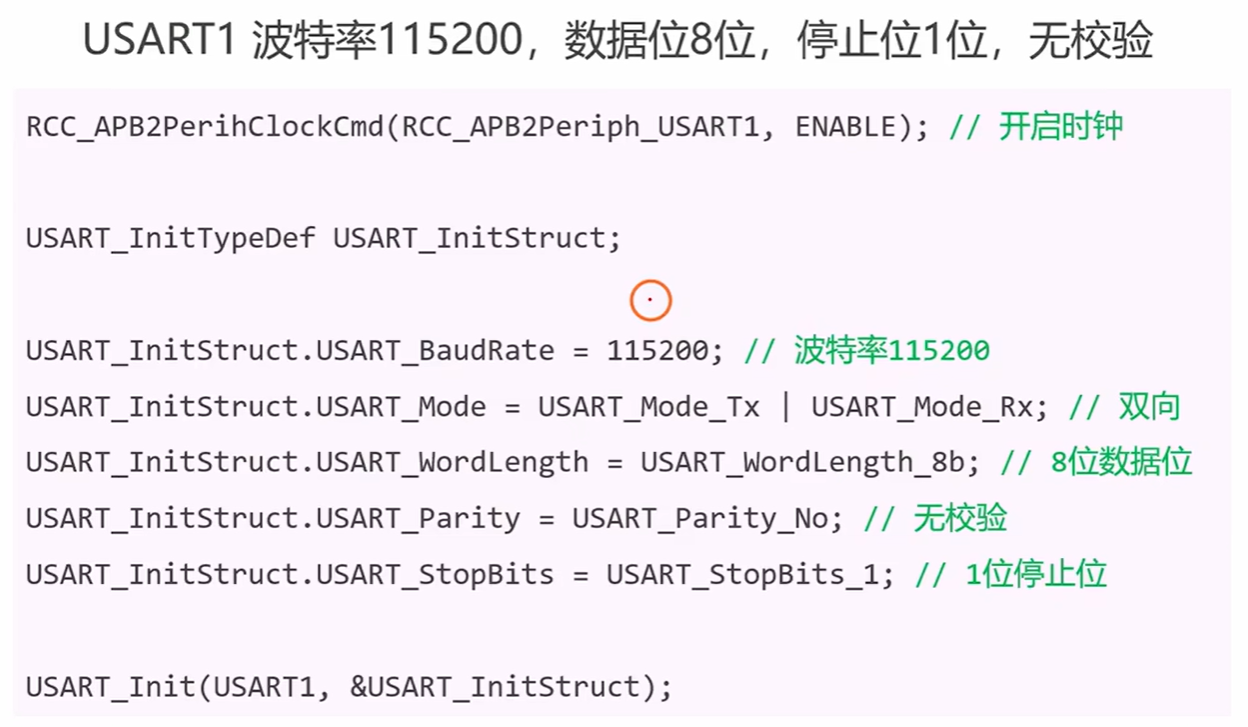
三、串口的引脚初始化
我们在上面已经了解了UART模块的配置方法。那么既然要向外传输数据,必然会有引脚暴露出来供我们使用,那么他们是谁呢?
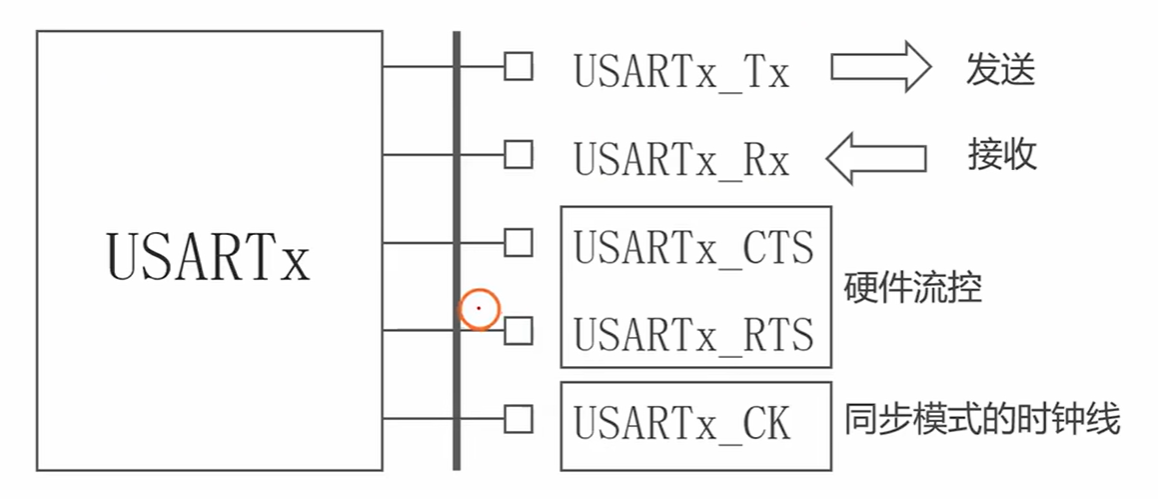
USART的引脚有这5个,其中Tx和Rx最为熟悉,是用来传输数据的。而硬件流控我们暂时并不会涉及到,也不过多讲解。同步模式的时钟线,则是如果你想让两个STM32单片机进行数据交流,则可以用这个时钟线把两台主机连接到一起,让他们都遵循一个时钟,在该时钟的指导下进行串口通信,保证数据的准确性。
(1)引脚分布表
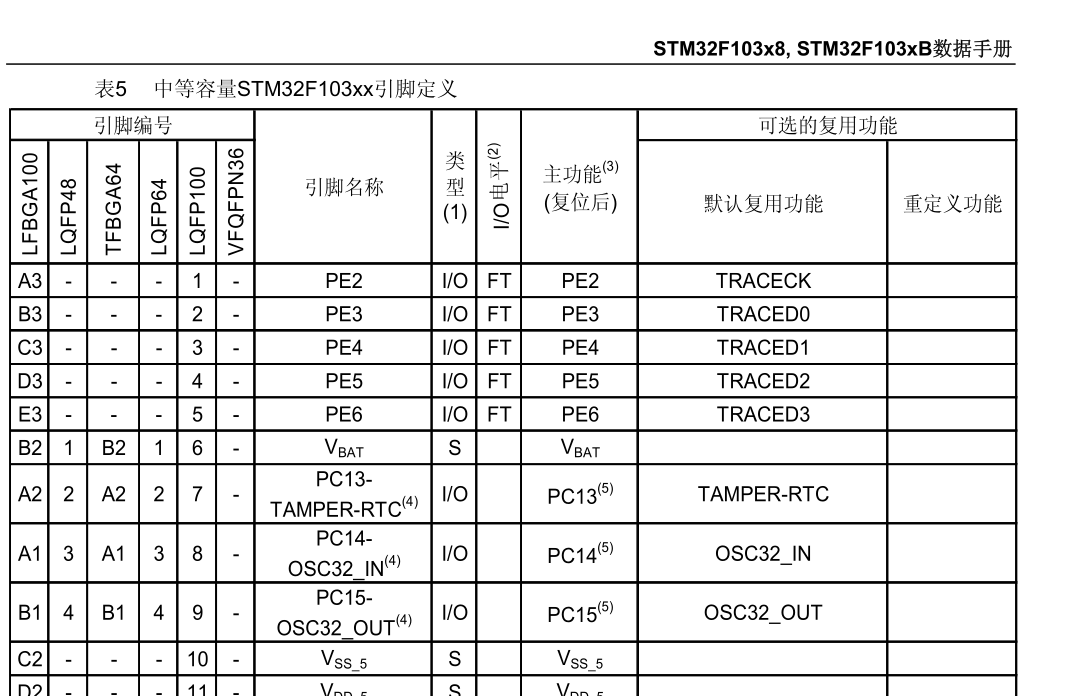
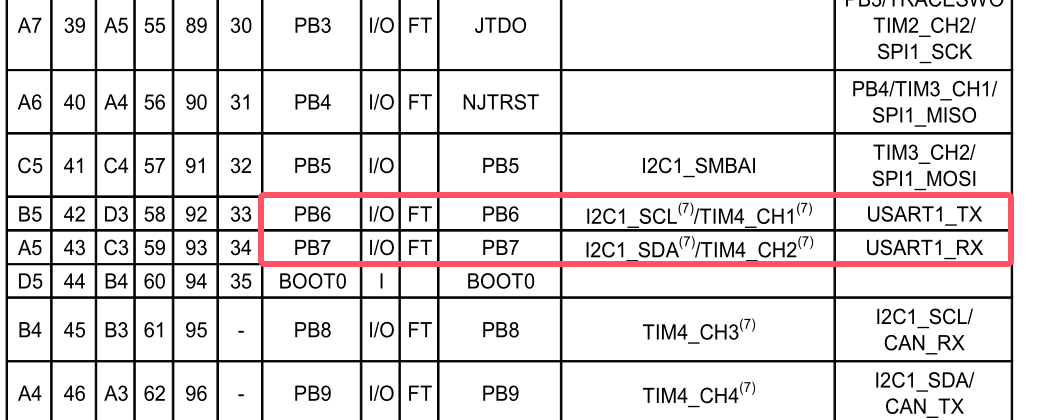
在数据手册中有这样两幅图,他们表示了当前芯片的封装情况、重映射情况。
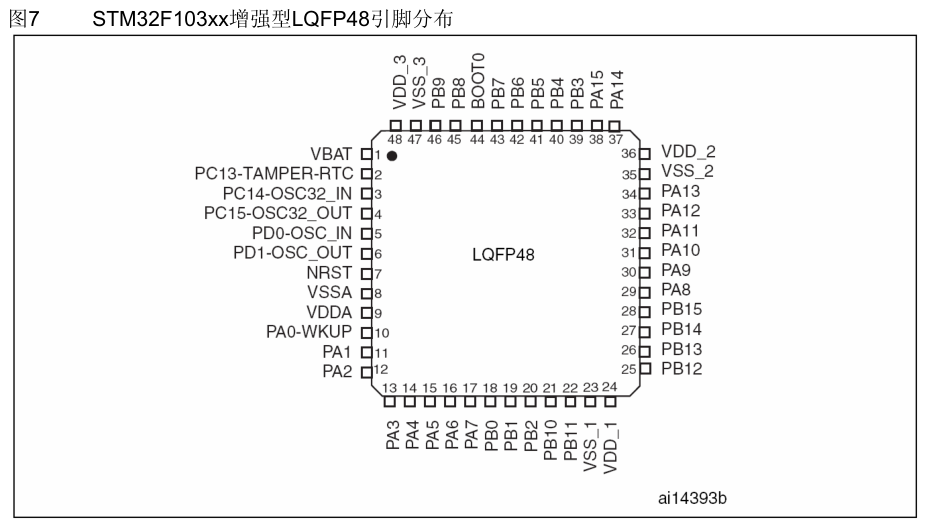
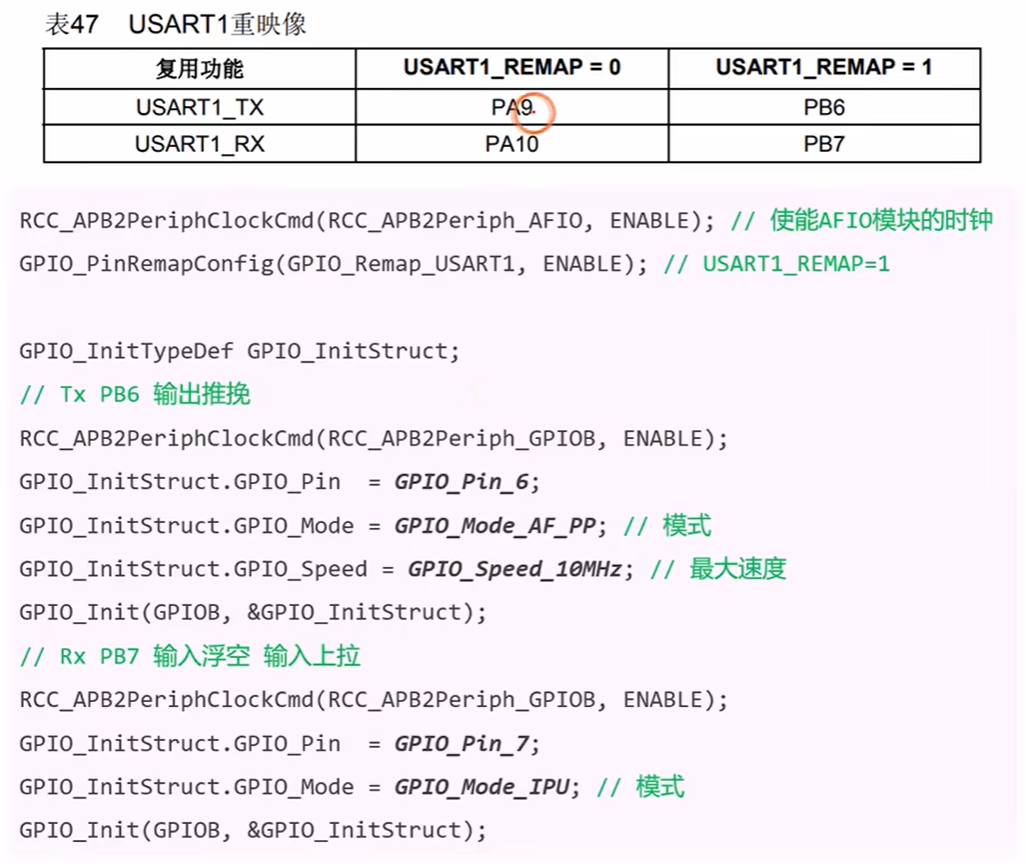
由于他比较多,我直接把和UASRT相关的引脚内容挑出来看,所以知道了我们在不使用重映射的情况下USART的输入输出引脚是接在PA9和PA10上面的。如果你就想使用默认情况,则直接配置PA9和PA10两个引脚即可。
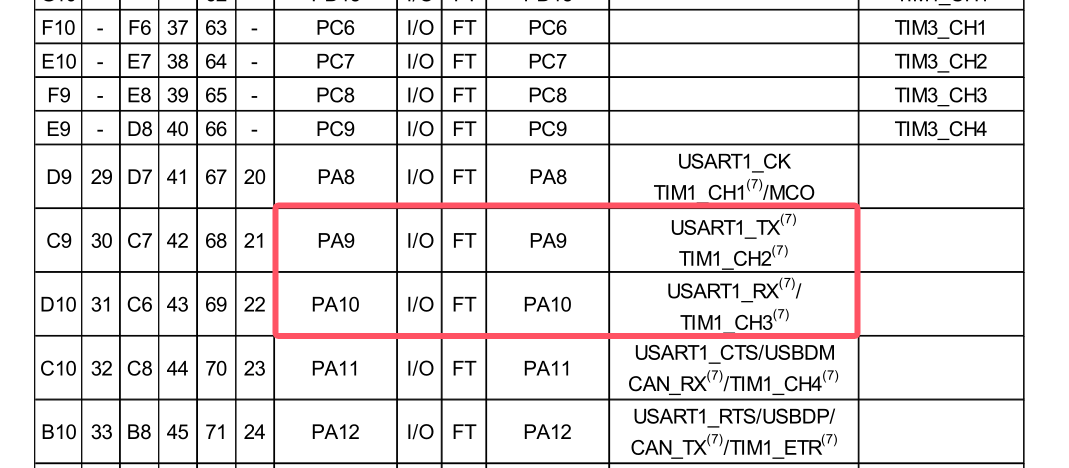
当然,在重映射后他们的位置则变为了PB6和PB7。注意你如果把他们配置成了USART的引脚,则原本的GPIO功能是无法使用的。
(2)重映射表
在上面直接看引脚分布表比较麻烦,可以直接到使用手册中查看。内容是一样的。

(3)GPIO配置表
我们已经找到了其引脚,配置成什么模式呢?
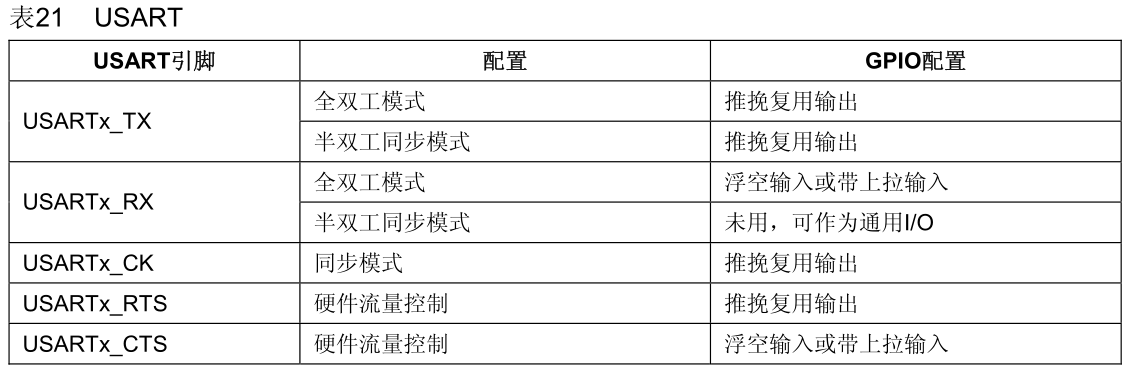
在使用手册中同样有一个表格,明确说明了各种外设在使用GPIO的时候,应当被配置为什么模式。
在这里我们看到全双工模式下,Tx要配置成推挽复用输出、Rx要配置成上拉输入。
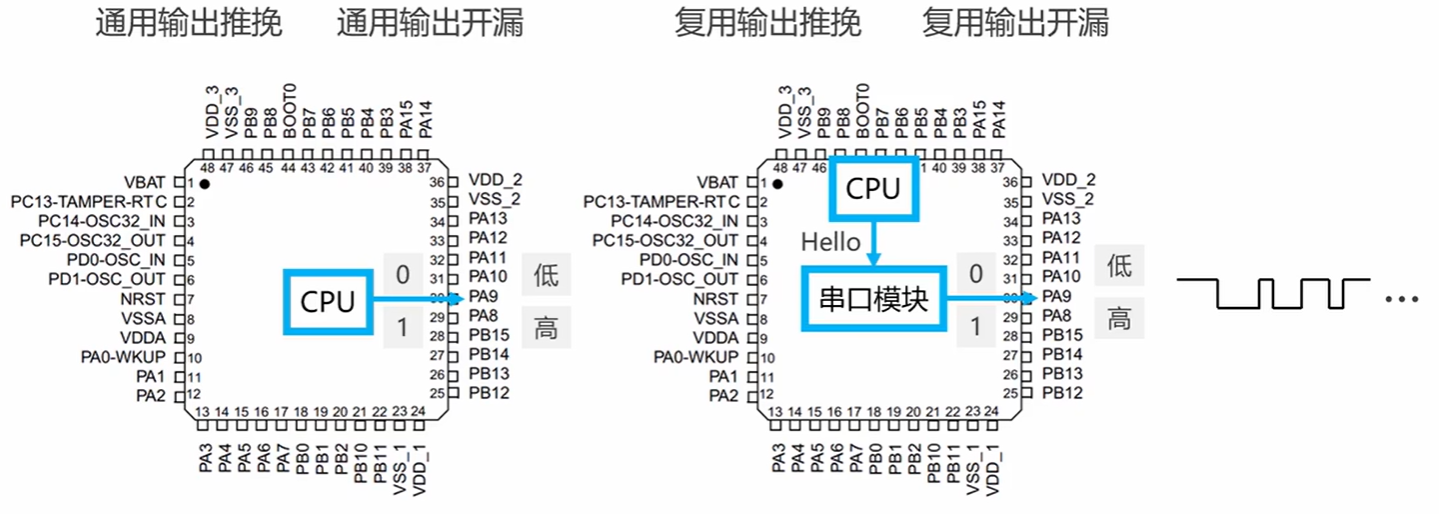
复用推挽输出和通用推挽输出的区别就是:一个是由CPU直接控制引脚的电平高低,另一个把引脚电平的控制权交给外设模块自己操作,更加方便。
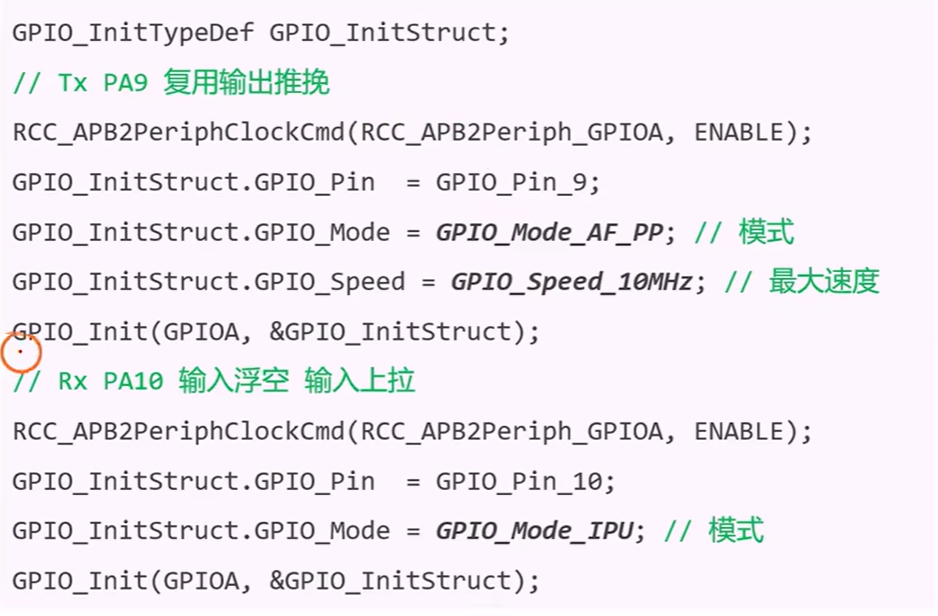
(4)C语言接口使用
默认情况:
重映射情况:
四、标志位的使用
在USART的框图中我们曾有一部分没有讲解,就是右上角的标志位。通过读取标志位,可以让我们时刻检查到USART模块的运行情况。
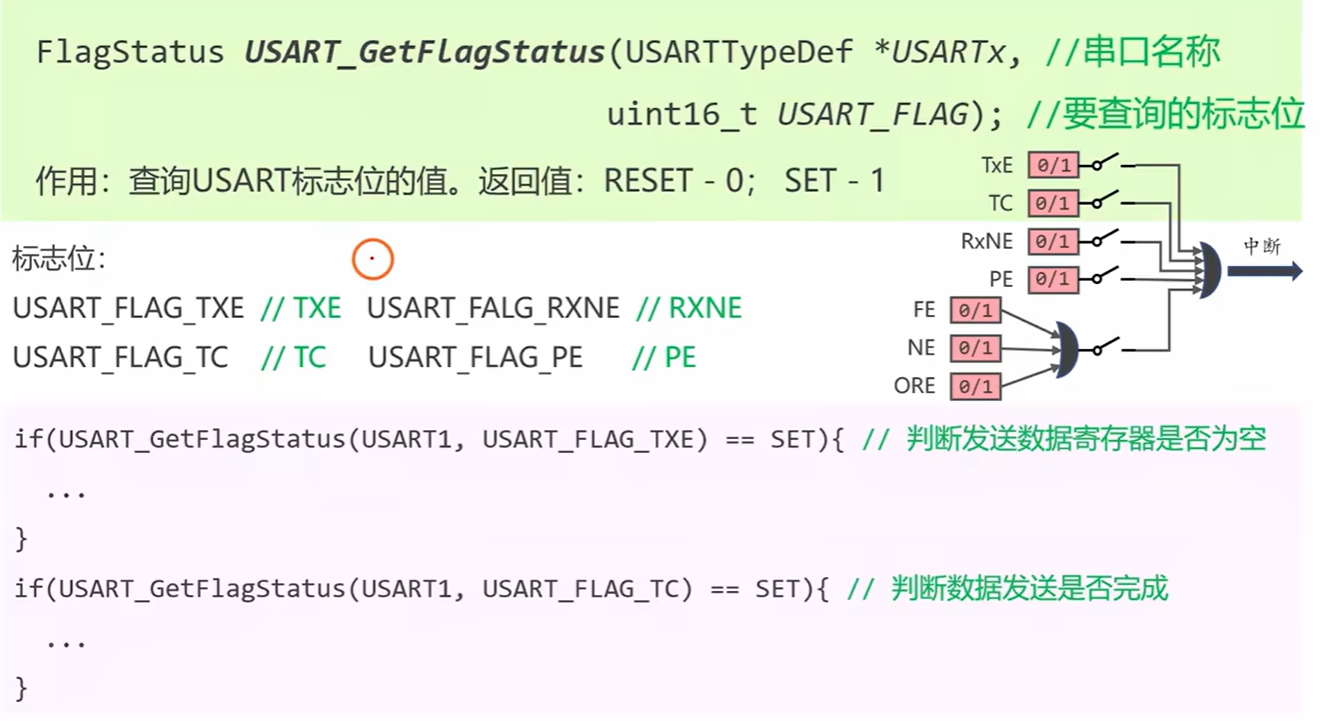
(1)读写标志位
TxE:检查能否填入数据到发送寄存器

TC:检查档次发送过程是否结束

RxNE:

(2)错误标志位
我们在通过USART协议传输数据的时候,难免会出现某些原因,使得数据的发送端和接收端并不一致,我们就认为他出错了。虽然USART的控制电路会自动检测错误,但是我们上层应用要想知道仍需要查看这些标志位来获取状态。
错误标志位是一个协议中非常重要的存在。通过检验错误标志位,你可以对不同的错误做出不同的处理,比如:如果接受数据错误,你可以选择向对端发送消息,告诉他你的数据错了,请重新发。有没有回想到我们之前学习TCP也是这样的!
PE: 

FE:

比如没有接收到停止位,就是一种帧格式错误。
NE:
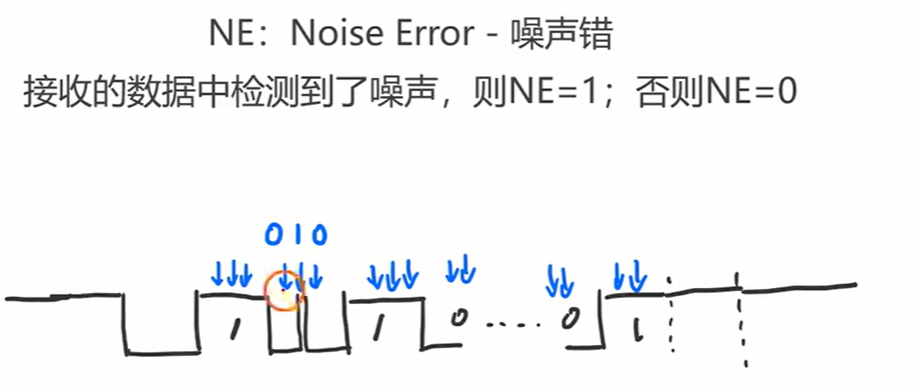
我们实际在接受一个USART协议的信号的时候,会在一个时钟周期内多次检测,看看每次检测的结果是不是一样的,如果不一样则表示有噪音,该数据不可信。
ORE:
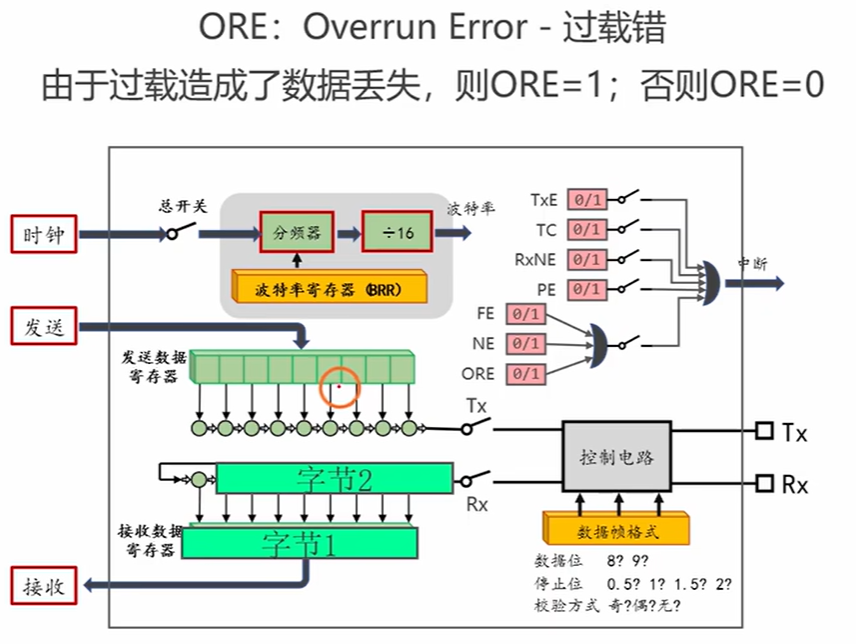
当接受寄存器中有数据没有被上层应用取走,他会停留在原地(字节1),如果有数据又来了,他就保存在了接收端的移位寄存器(字节2),此时仍然没有问题。但是如果继续来了数据(字节3),他就会覆盖掉移位寄存器中的字节2,此时控制电路就会监测到该情况,并把ORE置1。
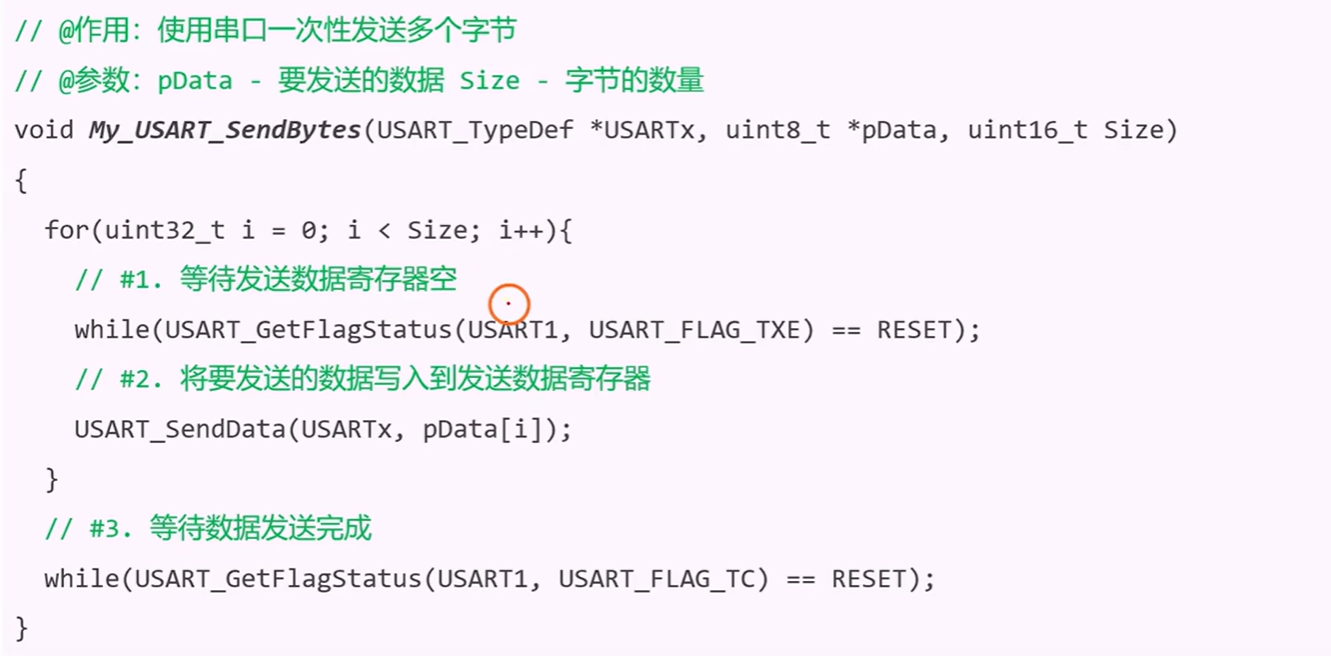
五、发送数据代码
向发送寄存器写入数据的函数

对上述代码进行封装:
cpp
void Init_USART()
{
//USART配置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate=115200;
USART_InitStruct.USART_Mode=USART_Mode_Tx | USART_Mode_Rx;
USART_InitStruct.USART_WordLength=USART_WordLength_8b;
USART_InitStruct.USART_Parity=USART_Parity_No;
USART_InitStruct.USART_StopBits=USART_StopBits_1;
USART_Init(USART1,&USART_InitStruct);
//GPIO配置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//使能USART
USART_Cmd(USART1,ENABLE);
}
void My_USART_SendBytes(USART_TypeDef* USARTx,uint8_t* pData,uint16_t Number)
{
for(uint16_t i=0;i<Number;i++)
{
//不为空的时候就在while循环中出不来
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
//走到这说明发送寄存器为空了
USART_SendData(USARTx,pData[i]);
//如果移位寄存器没有清空,就不退出这个函数
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
}
}
int main(void)
{
Init_USART();
uint8_t datas[]={10,50,90,100,66};
while(1)
{
My_USART_SendBytes(USART1,datas,5);
}
}如果你上述步骤都正确的话你是可以成功的通过STM32单片机向电脑主机发送消息的。结果如下: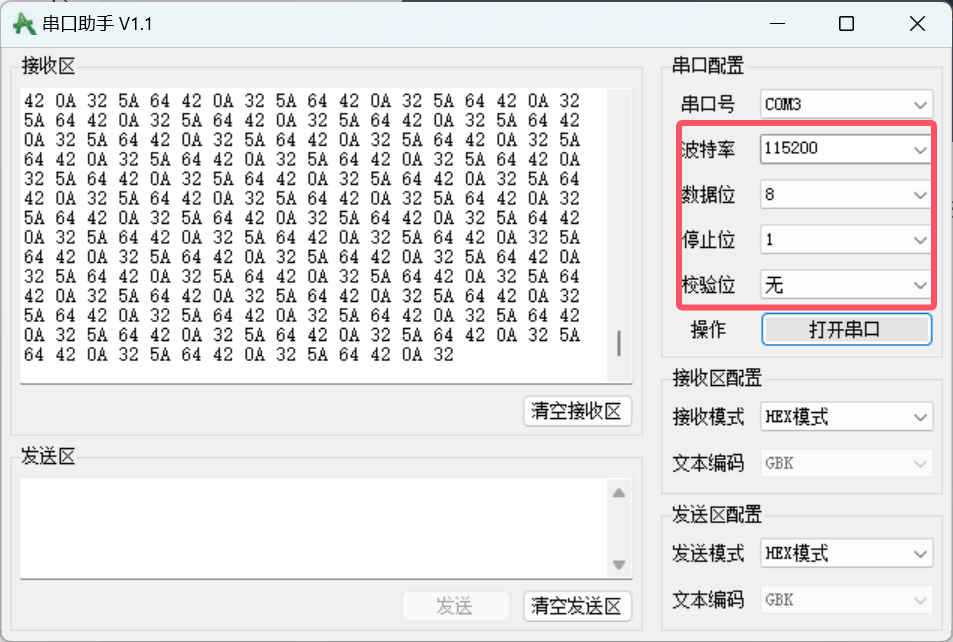
六、接收数据代码

具体使用如下:
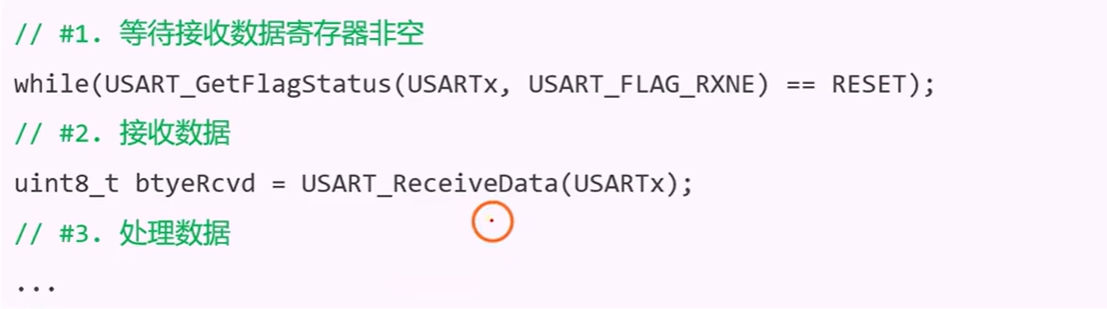
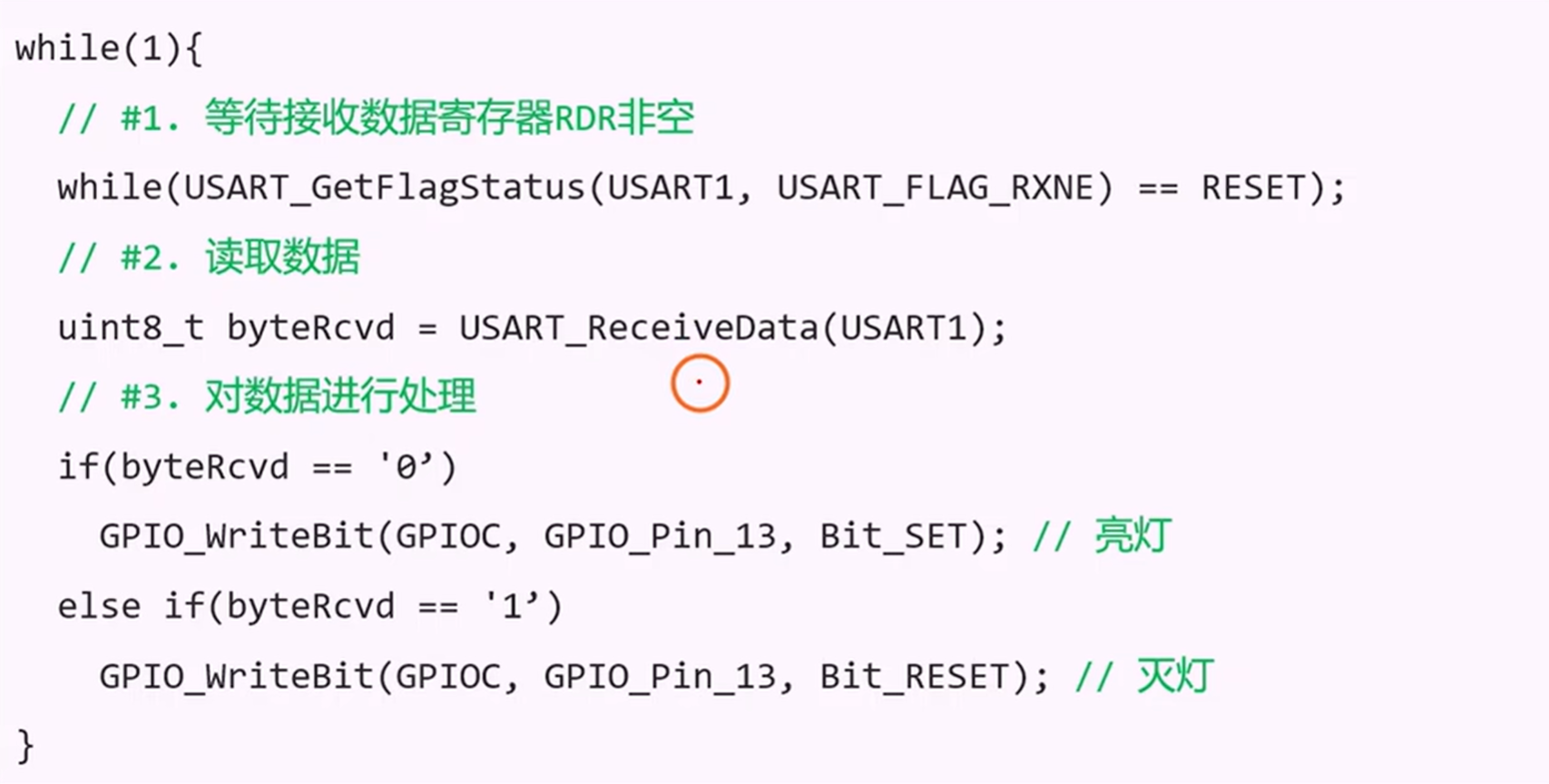
示例代码:
cpp
void Init_USART()
{
//USART配置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate=115200;
USART_InitStruct.USART_Mode=USART_Mode_Tx | USART_Mode_Rx;
USART_InitStruct.USART_WordLength=USART_WordLength_8b;
USART_InitStruct.USART_Parity=USART_Parity_No;
USART_InitStruct.USART_StopBits=USART_StopBits_1;
USART_Init(USART1,&USART_InitStruct);
//GPIO配置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IPU;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_10;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//使能USART
USART_Cmd(USART1,ENABLE);
}
void My_USART_SendBytes(USART_TypeDef* USARTx,uint8_t* pData,uint16_t Number)
{
for(uint16_t i=0;i<Number;i++)
{
//不为空的时候就在while循环中出不来
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
//走到这说明发送寄存器为空了
USART_SendData(USARTx,pData[i]);
//如果移位寄存器没有清空,就不退出这个函数
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
}
}
void My_Led_Init(void)
{
//GPIO配置
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_OD;
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_13;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_2MHz;
GPIO_Init(GPIOC,&GPIO_InitStruct);
//初始设置为灭,即GPIOC_Pin_13为高电平
GPIO_WriteBit(GPIOC,GPIO_Pin_13,Bit_SET);
}
int main(void)
{
My_Led_Init();
Init_USART();
uint8_t datas[]={10,50,90,100,66};
while(1)
{
// My_USART_SendBytes(USART1,datas,5);
//接收数据,并处理
while(USART_GetFlagStatus(USART1,USART_FLAG_RXNE)==RESET);
uint8_t byteEecv=USART_ReceiveData(USART1);
//处理
//0灭
if(byteEecv==0)
{
GPIO_WriteBit(GPIOC,GPIO_Pin_13,Bit_SET);
}
//1亮
else if(byteEecv==1)
{
GPIO_WriteBit(GPIOC,GPIO_Pin_13,Bit_RESET);
}
}
}如果你的操作正确,则可以看到用串口控制芯片上的LED了。