目录
记录凌启科技的光流测距一体模块在px4飞控上的配置
1、光流测距一体模块的配置,详细步骤
1.1、连接
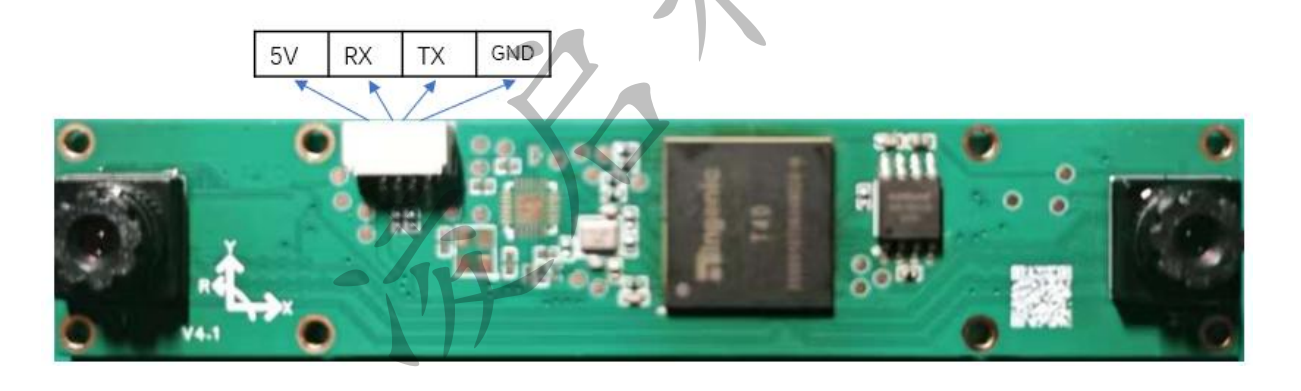
a、通过TTL转串口模块,连接光流测距模块和电脑,注意TX和RX要交叉连接。
1.2、上位机使用
b、打开上位机软件,使用的是VOFA+上位机软件,配置串口,打开上位机,将协议配置为VOFA协议(vofa协议:AA AA CD DE 04),点击发送,就会收到数据信息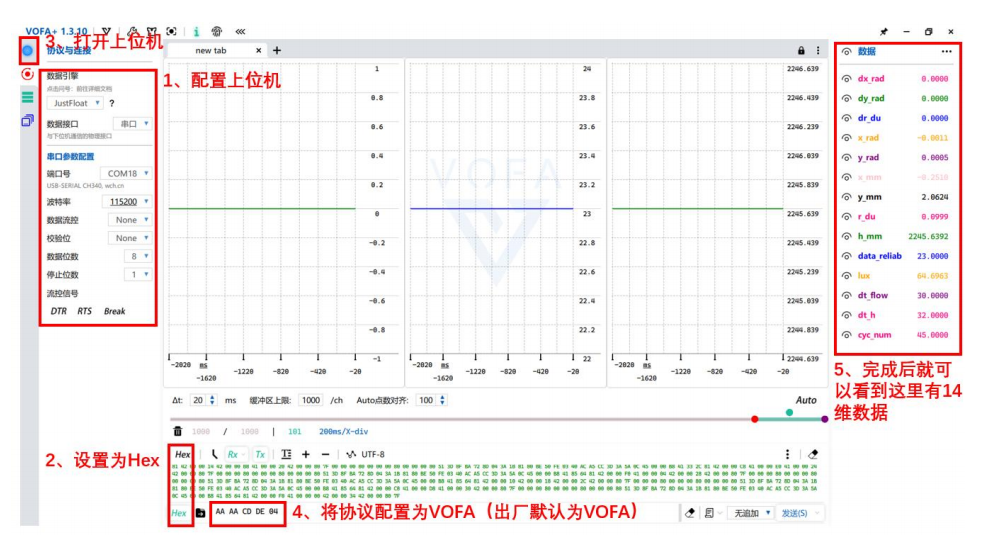
c、这里是上位机的软件操作教程:VOFA+:串口发送数据显示波形_vofa怎么显示波形-CSDN博客。。。软件操作 | VOFA-Plus上位机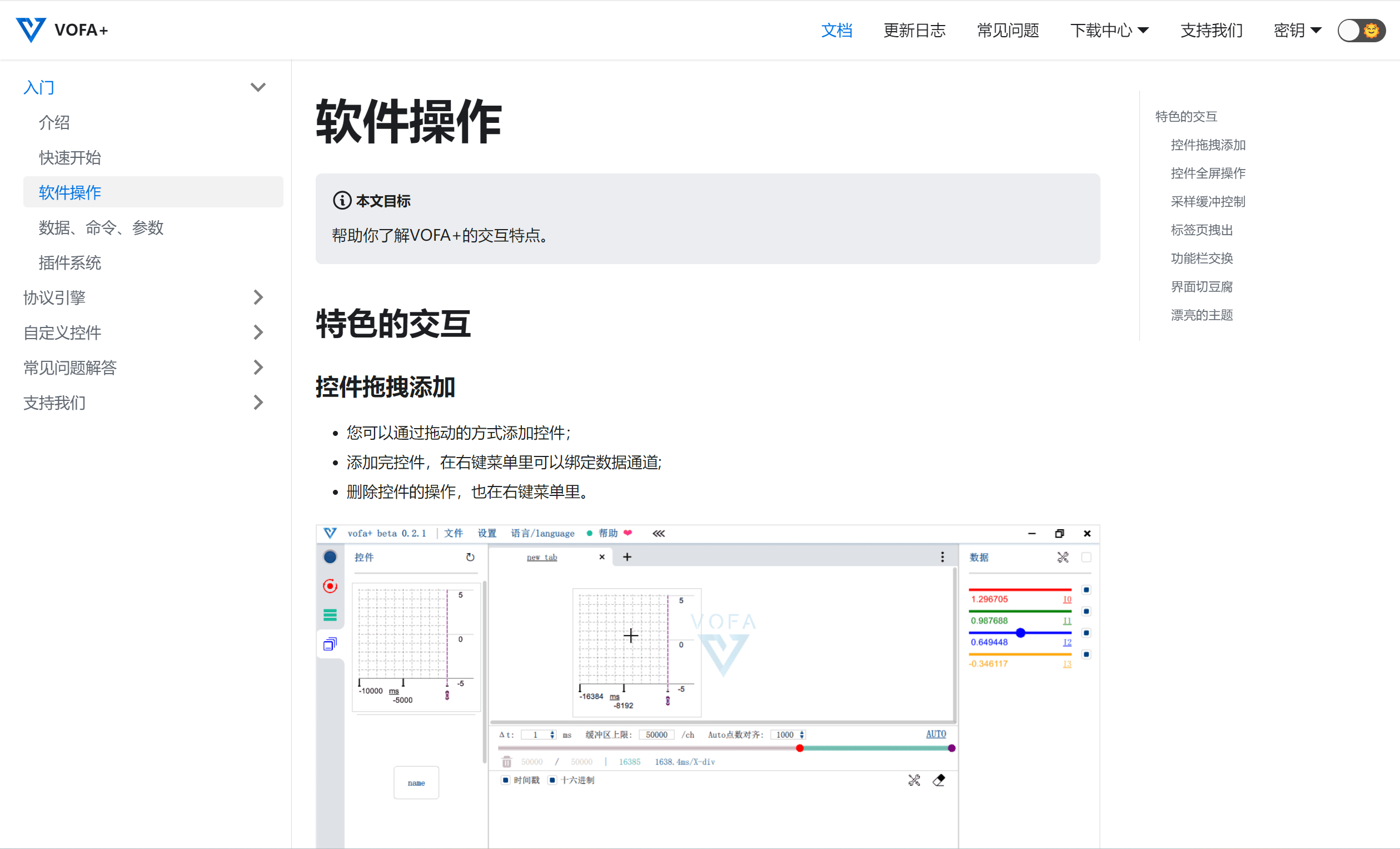
d、通过上位机,可以对光流测距一体模块进行简单的测试,比如距离信息,光流质量等。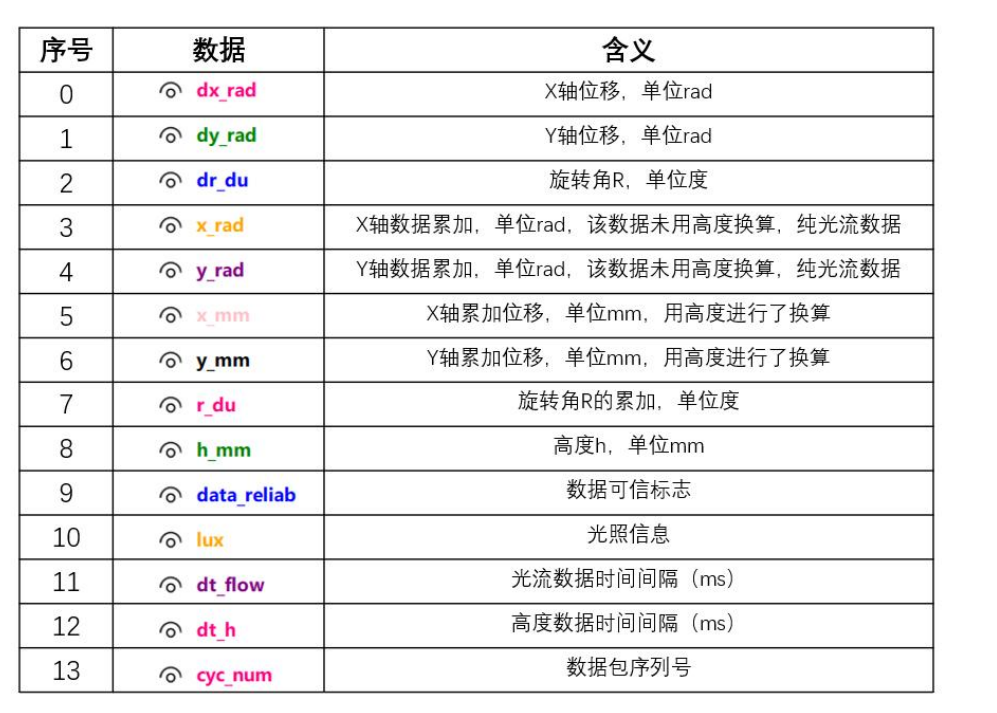
1.3、切换为PX4协议
e、切换模块协议,要把光流测距模块适配在PX4飞控上,那么就要切换光流测距模块的输出协议,切换为mavlink协议:AA AA CD DE 02,点击发送,这样,光流测距模块的配置就完成了。
f、下面是一些命令,在输入框输入点击发送即可:vofa协议:AA AA CD DE 04
mavlink协议:AA AA CD DE 02
高度校准10米:AA AA AA BC 00 27 10
高度校准3米:AA AA AA BC 00 0B B8
2、适配PX4飞控,QGC上参数配置
这里使用的是最新版本的PX4飞控固件,1.15
在QGC中找到以下参数并更改
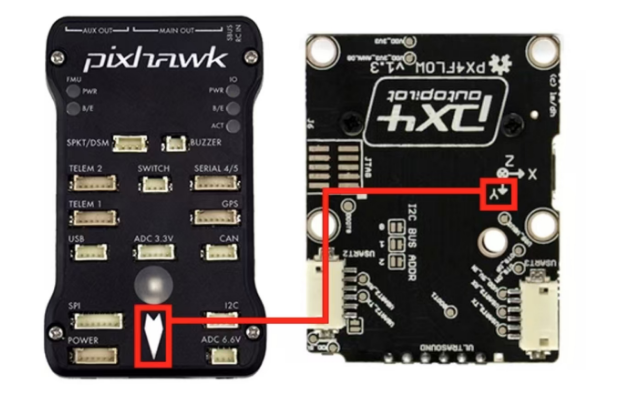
2.0、安装连接
保持光流测距模块的Y轴方向与飞控机头方向一致。
选择一个未被占用的飞控串口,连接光流测距模块,注意注意TX和RX要交叉连接。
2.1、串口配置:
MAV_1_CONFIG TELEM n :(光流测距模块连接哪个串口就配置哪个)
重启飞控
MAV_1_MODE Normal (MAV_0/MAV_2都可以,看看哪个没有被占用)
SER_TELn_BAUD 115200 8N1 (配置串口的波特率)
2.2、启用光流辅助功能
EKF2_OF_CTRL Enabled 光流辅助功能。启用光流融合。
2.3、启用测距辅助功能
EKF2_RNG_CTRL Enabled 启用测距辅助模式:这里设置为直接启用
测距传感器辅助可以启用(即:始终使用)或设置为 "条件" 模式。条件模式:这允许在低速(< EKF2_RNG_A_VMAX)和低空(< EKF2_RNG_A_HMAX)操作时使用测距仪
2.4、高度参考设置
EKF2_HGT_REF Range sensor :确定 EKF 使用的高度数据参考源,选择测距仪为高度参考
2.5、重启飞控
2.6、设置光流安装旋转方向
SENS_FLOW_ROT No rotation (1.14及以后版本该参数默认值如此,无需设置)
2.7、重启飞控,设置完成
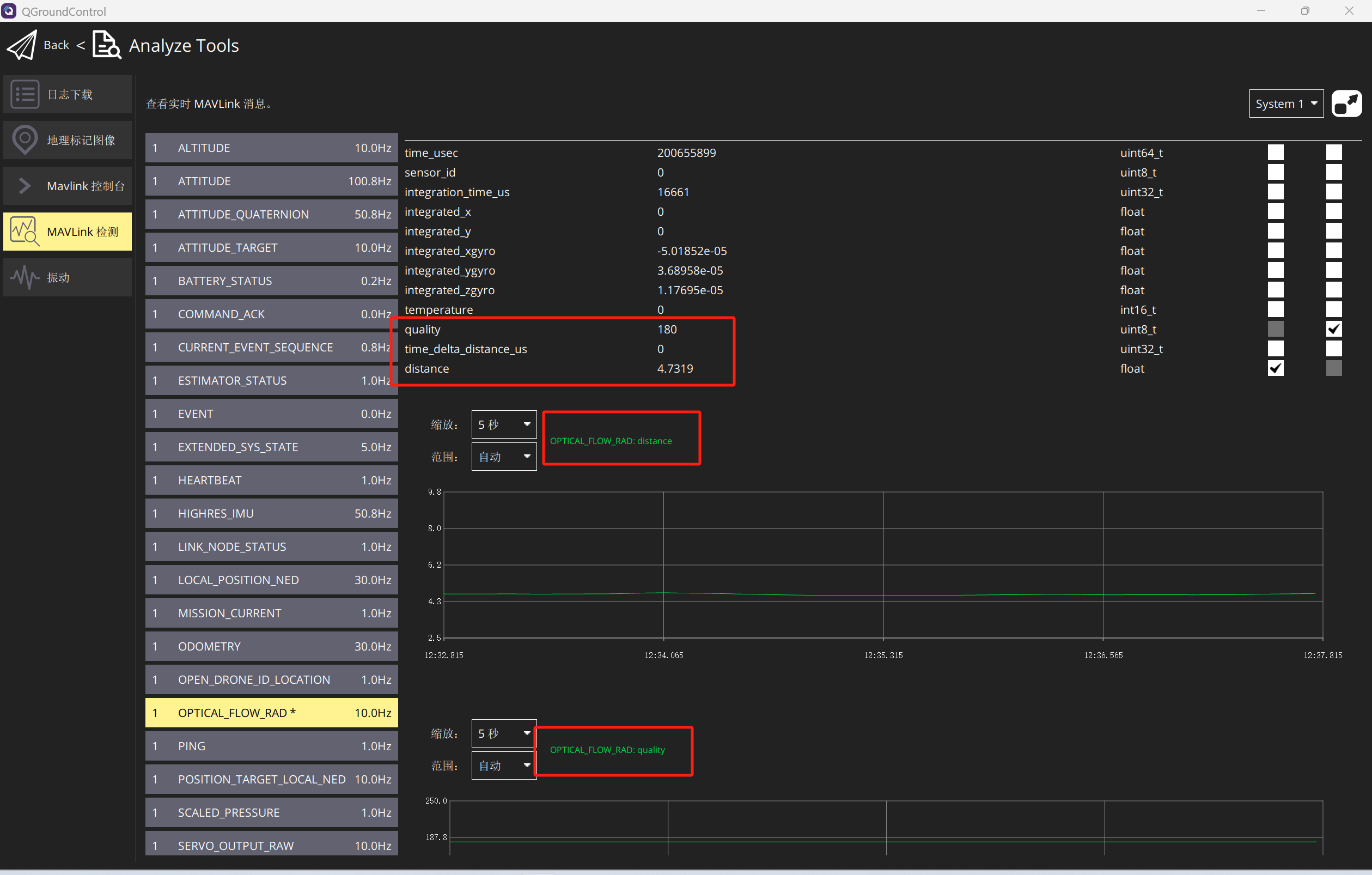
重启飞控,一切正常的话,在QGC的MAVLink Inspector页面中应该能看到DISTANCE_SENSOR和OPTICAL_FLOW_RAD消息。
注意,QGC上显示的消息由飞控发出,消息频率并不等同于传感器的数据频率,这个频率由飞控的设置和数据链路的速度决定,主要用于观察,消息频率多少并不重要。
如果地面站是通过某些数传连接飞控时,由于数据链路速率较低,飞控会选择性发出数据,导致在QGC有可能看不到某些消息帧比如OPTICAL_FLOW_RAD,因此这一步建议使用USB连接飞控。
也有的模块测距数据和光流数据都显示在OPTICAL_FLOW_RAD一栏。
其他参数设置:
了解即可,可以根据需要进行设置
- EKF2_RNG_POS_X、EKF2_RNG_POS_Y、EKF2_RNG_POS_Z - 测距仪在 X、Y、Z 方向上相对于飞行器重心的偏移量。
- EKF2_OF_POS_X、EKF2_OF_POS_Y 和 EKF2_OF_POS_Z 可用于设置 光流 相对于飞行器重心的偏移量。
- EKF2_RNG_PITCH - 值为 0 度(默认)时,表示测距仪与飞行器垂直轴完全对齐(即垂直向下),而 90 度表示测距仪指向前方。如果使用非零的俯仰角,则使用简单的三角函数来计算到地面的距离。
- EKF2_RNG_DELAY - 数据从传感器到达估计器的大致延迟时间。
- EKF2_RNG_SFE - 与测距仪测距范围相关的噪声缩放因子。
- EKF2_RNG_NOISE - 用于测距仪数据融合的测量噪声。
- EKF2_MIN_RNG(FLOAT):地面时预期的测距仪读数。测距仪返回无效数据或无数据,则地形估计器将使用 EKF2_MIN_RNG 作为假定的测距值
参考:【无人机】无人机光流模块Optical Flow设置,PX4使用手册光流模块详细配置_px4怎么添加光流传感器-CSDN博客
【无人机】无人机测距仪测距模块的配置,PX4使用手册的详细介绍_卫星用微波测距仪 500米-CSDN博客
【无人机】无人机光流模块Optical Flow设置(二),光流测距一体传感器的配置。微空MTF-01光流测距一体传感器在px4飞控上的配置_无人机光流传感器-CSDN博客