GNSS 干扰导航套件:POLAR-300 和 VNS01 在恶劣环境下实现精确导航

在恶劣环境下进行精确导航
介绍
随着技术进步和地缘政治挑战的出现,对无人机系统(UAS)可靠、安全导航的需求日益增长。确保民用和国防领域的运行完整性至关重要。旨在干扰无线电电子导航和通信的系统的出现,更加凸显了这一需求。由于全球导航卫星系统(GNSS)信号日益受到无意和有意干扰的威胁,传统导航系统的不足之处也显露无疑。
由POLAR-300和视觉导航系统(VNS01)组成的导航套件,为应对这些挑战提供了一种突破性的解决方案。VNS01不受外部干扰,代表了自主导航的未来。本白皮书深入探讨了该套件无与伦比的功能,重点介绍了即使在传统系统失效的情况下,它也能精准导航的实际应用场景。
全球导航卫星系统(GNSS)信号中断可能源于多种因素,包括自然现象、技术故障,以及更令人担忧的敌对势力蓄意干扰或阻塞,这些都会威胁到GNSS信号的完整性。本文将重点讨论后者,其攻击方式可分为两类:干扰,即故意抑制GNSS信号;以及欺骗,后者更为危险,敌方会模拟GNSS信号来欺骗飞机,导致其坠毁或偏离预定航线。
面对此类干扰,对于完全依赖这些信号进行导航的行动而言,其后果可能是毁灭性的。在分秒必争的情况下,例如时间紧迫的军事行动或紧急响应,即使是偏离计划路线的轻微偏差或短暂的导航中断都可能导致灾难性后果。全球导航卫星系统(GNSS)信号中断事件的日益增多凸显了这一弱点,因此迫切需要一种更具弹性的导航解决方案。
干扰是指故意中断或干扰全球导航卫星系统(GNSS)信号。这种干扰会用噪声或其他干扰信号淹没真实的GNSS频率,使接收原始信号变得困难,并常常导致连接丢失或数据不准确。干扰的危害非常严重。严重依赖GNSS的系统可能会失去导航能力,偏离航线,危及任务完成,或使资产面临风险。
另一方面,欺骗攻击涉及创建和传输虚假的GNSS信号。与干扰仅仅扰乱信号不同,欺骗攻击会欺骗GNSS接收器,使其误以为接收到的是合法信号。这种欺骗会产生完全错误的定位数据,导致用户导航不准确。欺骗攻击的风险非常高。复杂的欺骗攻击可能使攻击者控制系统或车辆,进而可能导致其偏离航线或坠毁。
先进导航解决方案:克服GNSS的局限性
POLAR-300 AHRS 与 VNS01 可视导航系统集成,该系统配备机载摄像头,可在整个飞行过程中拍摄和处理图像。这使得系统能够创建内部地图,以便在 GNSS 信号不可用时使用。在处理这些图像时,VNS01 采用三种技术来确保精确确定绝对位置、姿态和相对运动。
视觉里程计:视觉导航基于"里程计"原理;换句话说,就是计算连续帧中奇异点的偏移量。它无法确定绝对位置,但可以告诉你移动了多少距离,误差范围很小,取决于行驶的距离。
模式识别:该技术基于对实时采集的图像与预先存储的地理参考数据集进行比对,从而搜索和识别特征点。一旦GNSS信号丢失,VNS01将开始搜索A点和B点之间的匹配项,以确定其绝对位置。一旦找到匹配项,导航误差将大幅降低。
利用 POLAR-300 进行航位推算:在 VNS01 信号不可用的情况下,例如飞越云层或海洋时,POLAR-300 仍可实现无 GNSS 导航。POLAR-300 配备了先进的惯性测量单元 (IMU),可进行航位推算导航。虽然该技术基于估算,并且会随时间累积误差,但 POLAR-300 中的 IMU 精度极高,可提供比传统解决方案更可靠的数据。
超越航位推算:Grupo Oesía 在 GNSS 受限环境下的自适应无人机导航方法
当传统导航系统失去全球导航卫星系统(GNSS)信号时,它们只能依靠航位推算进行导航。然而,由于使用了精度较低的传感器以及此类飞机固有的振动,误差会不断累积。随着时间的推移,这些误差会导致飞机偏离预定飞行区域数十公里。幸运的是,VNS01 解决了这一难题。它的摄像头能够持续拍摄实时图像,从而精确地确定自身位置和飞行轨迹。
每次任务中,系统都会学习和适应,从而提高精度和可靠性,进而降低对航位推算导航的依赖性及其相关风险。
真实世界评估
飞越已知区域:当飞越先前已覆盖的区域时,VNS01 会使用之前生成的内部地图。即使 GNSS 信号丢失,该预先存在的地图也能确保系统有效导航。在采用先进欺骗和干扰技术进行的实际测试中,该系统在此类情况下几乎没有定位误差。
飞越已知和未知区域:另一种常见情况是,飞机在未开启全球导航卫星系统 (GNSS) 的情况下,从之前已飞越且地图已存储的区域起飞。同时,这些飞机也可能飞往从未飞越过的区域,这意味着没有可用的地图。根据测试结果,在这种情况下,飞机的误差约为总飞行距离的 1%。
飞越未知区域:最严苛的测试是在完全未知的区域进行飞行,从始至终没有任何内部地图和GNSS信号,并且还要持续遭受欺骗攻击。在如此严峻的条件下,该系统仍能将定位误差控制在总飞行距离的1%左右。
未知区域盘旋:为了验证VNS01在陌生地形的学习和适应能力,测试目标是在没有GNSS信号的情况下,对未知区域进行盘旋飞行。为了在没有地图和GNSS的情况下保持最小误差,VNS01必须适应运行环境并记住其飞越区域。即使无法生成高质量地图,它也必须确保误差不会随时间增加。在这些测试中,经过长时间飞行后,误差仅为总飞行距离的0.5%。
利用 POLAR-300 进行航位推算:最后,最终测试是在不使用 VNS01 的情况下进行的飞行,完全依靠 POLAR-300 的惯性传感器进行航位推算导航。在这些不使用 GNSS 的飞行中,累积误差为总航程的 10%。
结论
这款导航套件在GNSS干扰导航解决方案领域实现了重大飞跃。它与市场上其他替代方案(例如被动式解决方案和抗干扰天线)有着明显的区别,后者主要依赖GNSS信号及其自身抵御攻击的能力。与这些替代方案不同,VNS01并不专注于直接对抗攻击,而是利用其内部功能在任何条件下都能实现精准导航。
实际性能指标凸显了该套件的可靠性和稳定性,尤其是在欺骗环境下,其漂移极小。市面上大多数其他导航工具在相同挑战下都会出现显著偏差。漂移的巨大差异,尤其是在不使用 VNS01 进行航位推算的情况下,更凸显了 POLAR-300 与 VNS01 协同工作所带来的无与伦比的导航精度。
GNSS-DENIED Navigation Kit(POLAR-300 & VNS01) 白皮书
1️⃣ 系统构成
| 模块 | 角色 |
|---|---|
| POLAR-300 | 高性能 AHRS / IMU,提供姿态与惯导 |
| VNS01 | 视觉导航系统(核心) |
| GNSS | 可选输入 ,不是系统稳定性的基础 |
2️⃣ VNS01 的三层视觉能力:
(1)Visual Odometry(VO,最低层)
-
连续帧特征点位移
-
只给相对位移
-
误差随距离线性增长
(2)Pattern Recognition(中层,关键)
-
将实时图像与预存的地理参考图像库匹配
-
一旦匹配成功 → 重新锚定绝对位置
-
误差"被拉回"
👉 本质是:视觉版"地图回环 / Loop Closure + 绝对约束"
(3)在线学习 / 自适应(高层)
-
未知区域飞行 → 边飞边学
-
Loitering(盘旋)时误差不发散(0.5%)
-
虽然不是高精地图,但足以抑制惯导漂移
3️⃣ POLAR-300 的角色定位
| 模式 | 累计误差 |
|---|---|
| 仅 POLAR-300 惯导 | 10% 路径长度 |
| VNS01 + POLAR-300 | 0.5% -- 1% |
👉 说明:
-
POLAR-300 ≠ 奇迹 IMU
-
它只是一个 "不会太快炸"的惯导基座
-
真正把系统"拉住"的是 视觉闭环
三、白皮书"1%、4%、无漂移"指标解读:
✅ "1% 误差"
-
定义:累计位置误差 / 总飞行距离
-
例如:飞 10 km → 误差 ≤ 100 m
-
出现场景:
-
未知区域
-
GNSS 全程不可用
-
视觉可用
-
⚠️ "4% 误差"
-
大概率对应:
-
视觉退化(云层、海面、低纹理)
-
仅部分视觉约束
-
-
接近"可返航,但不可精准任务"的水平
❌ "无漂移"
-
不是字面意义 0 漂移
-
而是:
-
有 外部绝对约束(视觉地图匹配)
-
漂移被周期性校正
-
误差不随时间单调发散
-
UAV Navigation 的 GNSS-DENIED Kit 本质是一个"以视觉为绝对约束核心、IMU 为连续性保障"的成熟工程方案;它证明了:在没有外部定位源时,只有"可回环、可学习、可重定位"的传感器,才能把误差压在 1% 以内。
通感算控一体化AiBrainBox
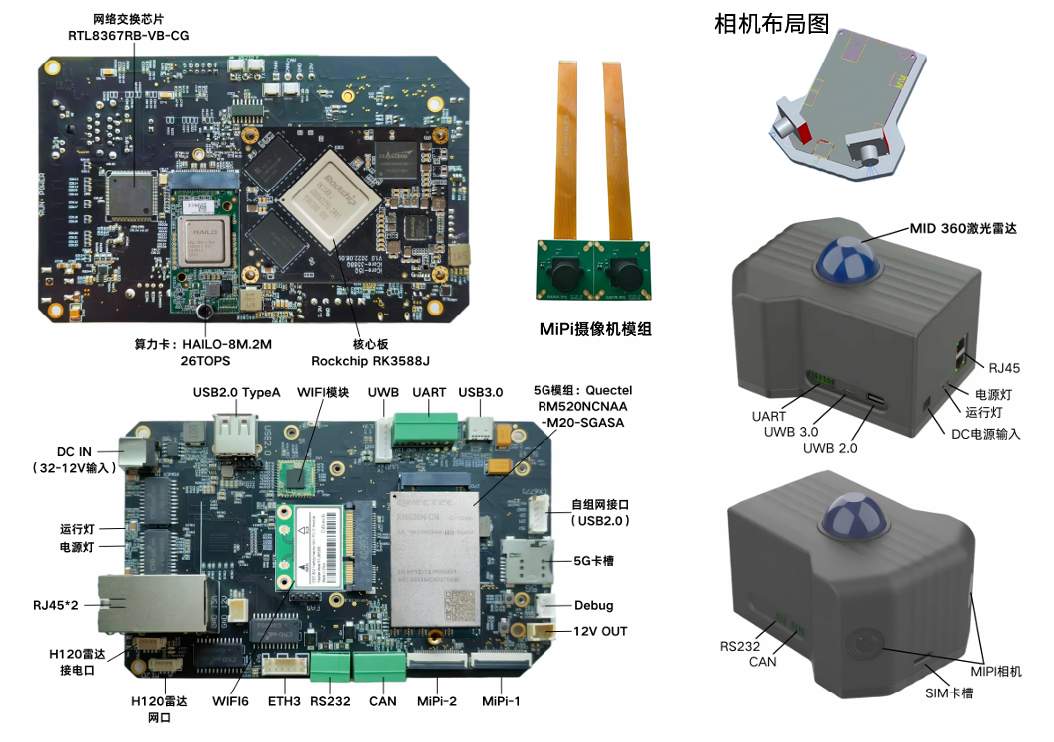
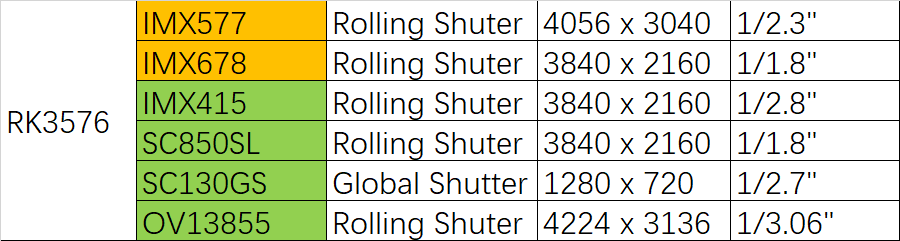
可选MIPI相机模块