我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。
老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:
周末洗了一个澡,换了一身衣服,出了门却不知道去哪儿,不知道去找谁,漫无目的走着,大概这就是成年人最深的孤独吧!
旧人不知我近况,新人不知我过往,近况不该旧人知,过往不与新人讲。纵你阅人何其多,再无一人恰似我。
时间不知不觉中,来到新的一年。2025开始新的忙碌。成年人的我也不知道去哪里渡自己的灵魂,独自敲击一些文字算是对这段时间做一个记录。

一、ECUs
与实际传感器和执行器具有紧密物理控制关联的实时且与安全相关的关键功能。
在汽车电子电气架构(E/E Architecture)中,与实际传感器和执行器紧密关联的实时安全关键功能必须满足严格的确定性、可靠性和容错性要求。这类功能通常部署在底层电子控制单元(ECUs)或区域控制器(ZCUs)的专用安全分区中,以确保毫秒级响应和ASIL-D级功能安全。以下是其技术实现与设计准则的详细分析:
1、典型安全关键功能清单
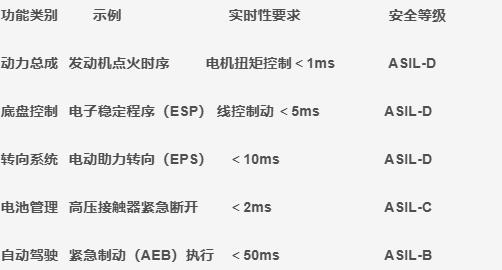
2、硬件部署策略
-> 专用ECU方案(高安全保障)
适用场景:适配ASIL-D级功能安全需求(典型应用如制动系统、转向控制等关键领域)。
硬件核心特性:
双核冗余校验架构:搭载锁步核MCU(如英飞凌TC397),通过双核同步运行与交叉校验机制,实时监测并纠正潜在计算偏差,确保控制逻辑零差错。
独立供电冗余设计:采用双电源回路(主电源+12V备用电源),主电源失效时无缝切换至备用电源,保障系统持续稳定运行。
物理隔离通信协议:集成物理隔离型通信接口(如FlexRay总线),通过硬件隔离层阻断电磁干扰与信号串扰,实现高速、低延迟且高可靠性的数据传输。
典型应用案例:
博世ESP® Hev II系统:该系统作为独立液压制动控制单元,通过本地化决策闭环完成制动指令的精准执行,同时经由CAN FD总线与中央控制单元(CCU)进行状态同步与信息交互,兼顾功能安全与系统协同效率。
方案价值:
通过冗余硬件架构、电源安全备份及物理隔离通信技术,构建覆盖全生命周期的失效防护体系,满足ASIL-D级功能安全标准,为自动驾驶、底盘线控等高安全需求场景提供可信赖的底层支撑。
-> ZCU安全分区方案(成本优化)
适用场景:适配ASIL-B/C级功能安全需求(典型应用如车门防夹、车窗防误触、座椅位置记忆等非致死性安全场景,需平衡功能可靠性与开发成本)。
关键实现技术:
硬件级任务隔离机制
ARM TrustZone虚拟化架构:基于硬件安全扩展技术,构建"安全世界"与"非安全世界"双域隔离环境,将安全关键任务(如传感器信号校验、执行器驱动逻辑)与舒适性功能(如用户界面交互)物理分区,避免低优先级任务干扰安全核心逻辑。
安全资源独占分配:通过硬件MPU(内存保护单元)为安全任务分配独立内存区域,并配置中断隔离策略,防止因资源争用导致任务阻塞或越权访问。
确定性调度控制体系
时间触发架构(TTA)设计:采用静态优先级调度算法,为安全关键任务分配固定时隙与超时阈值,确保防夹信号处理、执行器响应等操作在毫秒级时序窗口内完成,避免非确定性事件(如任务抢占、总线冲突)引发功能延迟。
冗余时序校验机制:部署硬件看门狗与周期性时间戳校验,实时监测任务执行时序是否偏离预期,若检测到异常则触发系统复位或安全状态切换。
典型应用案例:
特斯拉Model 3车门控制系统:
集成化域控架构:将车门控制功能集成于左前区域控制单元(ZCU),通过HSM(硬件安全模块)对车门传感器数据(如霍尔电流、电机转速)进行端到端加密传输,防止信号篡改。
QNX实时操作系统支撑:基于微内核架构的QNX RTOS提供硬实时调度能力,结合TrustZone安全分区,实现安全关键代码(如防夹算法)与舒适性代码(如无钥匙进入逻辑)的零冲突并行运行。
功能安全闭环验证:通过静态代码分析工具(如LDRA)与硬件在环测试(HIL),确保系统满足ISO 26262 ASIL-C级安全目标,在200万次防夹测试中实现零误触发与零漏检。
方案价值:
通过硬件虚拟化隔离、确定性时序保障与安全操作系统协同,以轻量化架构实现ASIL-B/C级功能安全,在降低系统复杂度与开发成本的同时,为车身控制、动力域扩展等场景提供可复用的安全中间件方案,助力主机厂快速落地差异化安全功能。
3、软件架构设计准则
A:实时性保障机制
中断延迟精准控制
超低延迟RTOS内核:采用QNX Neutrino等硬实时操作系统,通过微内核架构与中断优先级固化机制,实现中断响应时间<5μs(典型工况下可达1-3μs),确保安全关键信号(如防夹触发、碰撞预警)的即时捕获与处理。
确定性内存管理策略:
禁用动态内存分配:系统运行期间完全规避malloc/free等动态内存操作,通过静态内存池预分配技术,为任务栈、消息队列等资源分配固定内存区域,彻底消除垃圾回收或内存碎片化导致的不可预测延迟。
内存访问隔离:结合MPU(内存保护单元)划分安全内存域与非安全内存域,禁止跨域访问,避免因非法内存操作引发的任务阻塞或系统崩溃。
B:通信链路实时性优化
硬件加速通信协议栈:
优先级仲裁与带宽预留:针对关键数据(如防夹传感器信号、执行器控制指令)配置CAN FD/FlexRay总线的高优先级标识符(ID),并通过硬件过滤器(如CAN控制器ID掩码)屏蔽低优先级报文,确保关键帧传输零延迟。
确定性时序同步:在时间触发网络(TTA)架构中,通过全局时间基准(如IEEE 802.1AS精确时间协议)实现ECU间纳秒级时序同步,保障通信帧的周期性发送与接收,避免因总线竞争或时钟漂移导致的数据抖动。
C:零拷贝通信中间件:
共享内存加速:基于QNX的IPC(进程间通信)机制,通过共享内存区域(Shared Memory)直接传递传感器数据与控制指令,规避消息队列的序列化/反序列化开销,将通信延迟压缩至μs级。
信号-槽模式优化:采用静态绑定的信号-槽连接(Signal-Slot),在编译期固化通信双方地址,避免运行时动态查找导致的延迟,同时启用信号预取(Signal Prefetch)技术,减少缓存未命中对实时性的影响。
D:冗余路径与容错设计
多通道通信冗余:
双总线热备份:在关键ECU(如车门控制模块)中部署双CAN FD/FlexRay接口,主总线故障时自动切换至备用总线,切换时间<100μs,确保通信链路零中断。
看门狗监控:为通信任务配置独立硬件看门狗(如NXP S32K系列MCU集成WDOG),若总线响应超时(如200μs内未收到心跳帧),则触发系统复位或安全状态切换。
数据一致性校验:
端到端CRC校验:在通信帧中嵌入32位CRC校验码,接收端通过硬件CRC单元(如Infineon AURIX TC3xx系列)并行计算校验值,若检测到数据错误则立即丢弃并请求重传,重传超时阈值设置为50μs。
dart
// CAN FD报文发送的优先级配置(示例)
CAN_TxHeader.Priority = 0; // 最高优先级(制动信号)
HAL_CAN_AddTxMessage(&hcan, &CAN_TxHeader, data, &mailbox);功能安全实现
故障检测机制:
信号范围校验(Plausibility Check)
心跳包监控(Watchdog)
硬件自检(如MCU的RAM/FLASH CRC校验)
冗余设计:
双路传感器输入(如制动踏板位置双电位计)
执行器驱动冗余(如EPS双绕组电机)
安全通信协议
CAN FD加密:AES-128加速引擎(如NXP S32K3 MCU)
信号认证:

4、行业实践对比

ZCUs
在汽车电子电气架构(E/E Architecture)向区域化(Zonal)演进的过程中,区域控制器(ZCU)在车身与底盘功能中的部署策略需要兼顾实时性、安全性和成本效益。对于部分功能,保持与底层ECU及传感器/执行器的近距离交互,能够显著提升系统响应速度、降低通信延迟,并增强功能可靠性。
1、ZCU在车身/底盘功能中的核心优势
信号本地聚合,降低通信负载
传统架构:每个传感器/执行器直接连接至独立ECU,导致线束复杂(如传统车门模块需20+线缆)。
ZCU优化:
区域内的传感器信号(如车门开关、座椅占用检测)在ZCU本地预处理,仅上传有效数据至中央计算单元(CCU)。
数据压缩率:CAN FD信号聚合后可减少70%冗余报文(如多个车门状态合并为1条消息)。
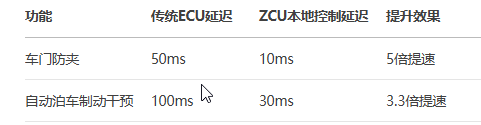
实时控制闭环,提升响应速度
硬件资源复用,降低成本
案例:特斯拉Model Y左前ZCU集成:
车门控制(LIN总线)
前雷达信号采集(LVDS)
大灯驱动(PWM)
BOM节省:减少3个独立ECU,线束成本降低15%。
2、典型功能部署策略
适合ZCU本地化的功能

仍需保留独立ECU的功能

3、技术实现方案
硬件架构设计
混合部署:ZCU与少量关键ECU共存,平衡集成度与安全性。
软件分层处理
dart
// ZCU软件栈示例(AUTOSAR Adaptive)
void zcu_task() {
// 1. 实时层(<10ms周期)
read_sensors(); // 本地信号采集
control_actuators(); // PWM/LIN驱动
// 2. 服务层(>100ms周期)
publish_aggregated_data(); // 通过SOME/IP上传至CCU
}安全隔离机制
内存保护:MPU隔离实时任务与非关键任务(如氛围灯控制)。
通信加密:HSM模块对上传CCU的数据进行MAC签名(防止篡改)。
4、行业实践案例

未来演进方向
智能执行器(Smart Actuators):
将基础控制逻辑下放至执行器(如带MCU的电动门锁),进一步减少ZCU负载。


在车身与底盘功能中,ZCU的合理部署能够实现"去中心化但不失控制":
优势:降低线束复杂度、加速实时响应、优化成本。
边界:安全关键功能仍需独立ECU保障,形成"ZCU+ECU"混合架构。
最终目标:通过ZCU的智能化,让车辆像"生物神经系统"一样,既有局部反射(ZCU快速响应),又有大脑决策(CCU全局优化)。
三、CCUs
集中式计算单元(CCUs)的核心定位与技术实现
集中式计算单元(Central Computing Units, CCUs)是第五代汽车电子电气架构的"大脑",负责处理高计算负载、低延迟要求的智能化功能。其核心使命是整合算力、降低系统复杂度、支撑软件定义汽车(SDV),具体通过以下方式实现:
1、CCUs的核心功能与计算需求
典型高算力应用场景
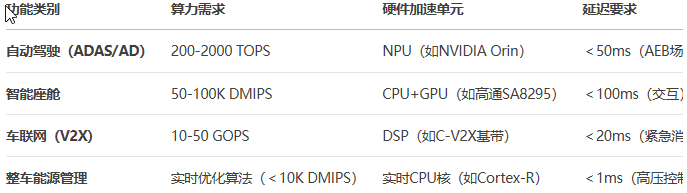
硬件架构特征
异构计算架构:
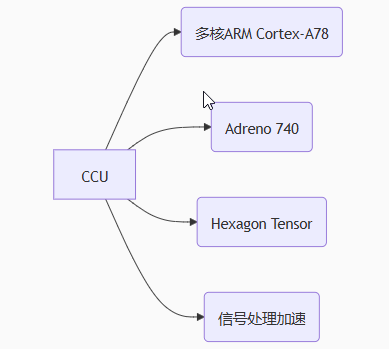
代表芯片:
特斯拉HW5.0(Dojo 2.0):集成CPU+NPU+光通信接口
英伟达Thor:2000 TOPS算力,支持舱驾一体
高速互联接口:
PCIe 5.0(32GT/s)连接区域控制器(ZCUs)
CXL 2.0协议实现内存池化(如三星HBM3堆叠)
2、CCUs的软件架构设计
分层处理模型
关键要求:
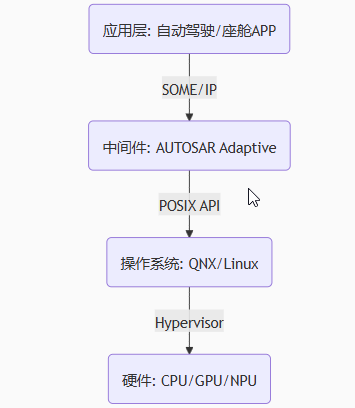
硬实时(RTOS)与非实时(GPOS)任务隔离(如QNX Hypervisor)
功能安全(ISO 26262 ASIL-D)与信息安全(TLS 1.3)双保障
典型软件栈

3、行业实践案例
特斯拉HW4.0/HW5.0
硬件:
三星Exynos-AP + AMD Navi 23 GPU + Dojo NPU
10G以太网骨干 + 光通信预留接口
功能整合:
同时运行FSD自动驾驶(144 TOPS)和Steam游戏平台(4K渲染)
蔚来NIO Adam超算平台
硬件:
4×NVIDIA Orin(1016 TOPS) + 自研NPU(图像预处理)
创新点:
通过CXL协议共享算力,动态分配资源给ADAS或座舱
高通SA9000P(2024量产)
特性:
集成5G Modem + AI加速(>100 TOPS)
支持"舱驾一体"(单芯片驱动仪表+自动驾驶)
4、关键挑战与解决方案


搁笔分享完毕!
愿你我相信时间的力量
做一个长期主义者
PS:
Hello 同行:首先谢谢您的关注!
可提供如下服务:
1、车载诊断架构、协议、数据库编辑(CDD/ODX/DBC)培训;
2、AUTOSAR软件架构理论、实践培训;
3、电子电器架构车载诊断刷写方式、网关、企业标准培训;
4、测试项目(脚本培训);
5、Bootloader demo源码、刷写上位机...