一、编码器接口简介
- Encoder Interface 编码器接口
- 编码器接口可接收增量(正交)编码器的信号,根据编码器旋转产生的正交信号脉冲,自动控制CNT自增或自减,从而指示编码器的位置、旋转方向和旋转速度
- 每个高级定时器和通用定时器都拥有1个编码器接口
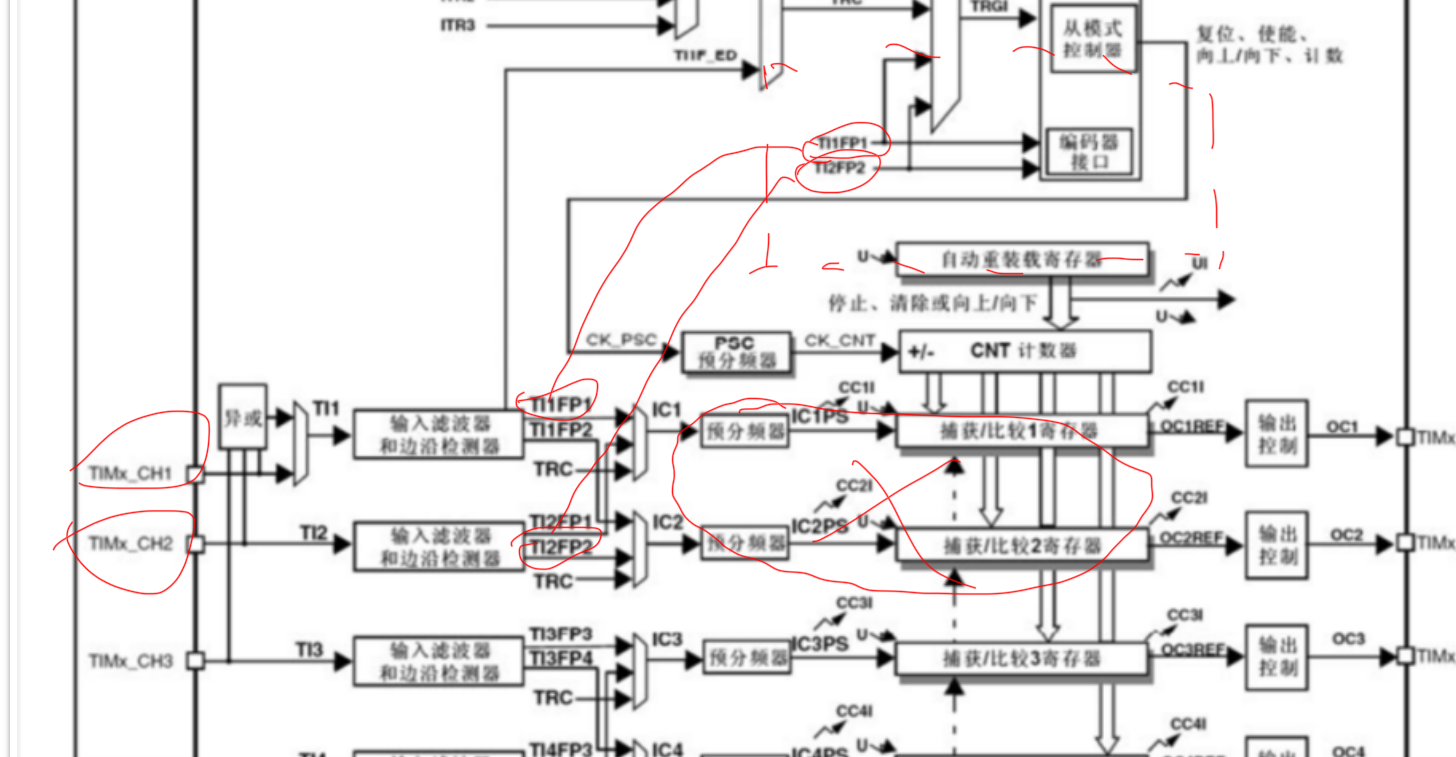
- 两个输入引脚借用了输入捕获的通道1和通道2
使用场景:使用定时器的编码器接口,再配合编码器,就可以测量旋转速度和旋转方向。一般应用于电机控制的项目上,使用PWM驱动电机,再使用编码器测量电机的速度,再用PID算法进行闭环控制。一般电机旋转速度比较高,会使用无接触的霍尔传感器或者光栅进行测速。(本人使用触点式旋钮编码器,电机是手动旋转)。
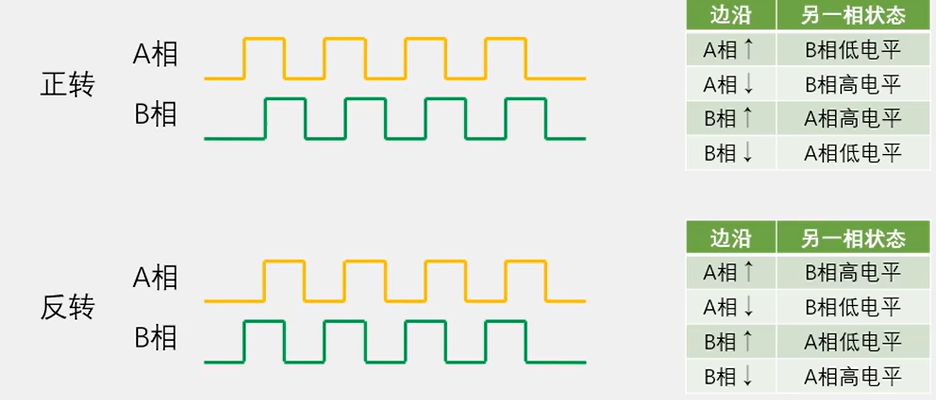
二、正交编码器
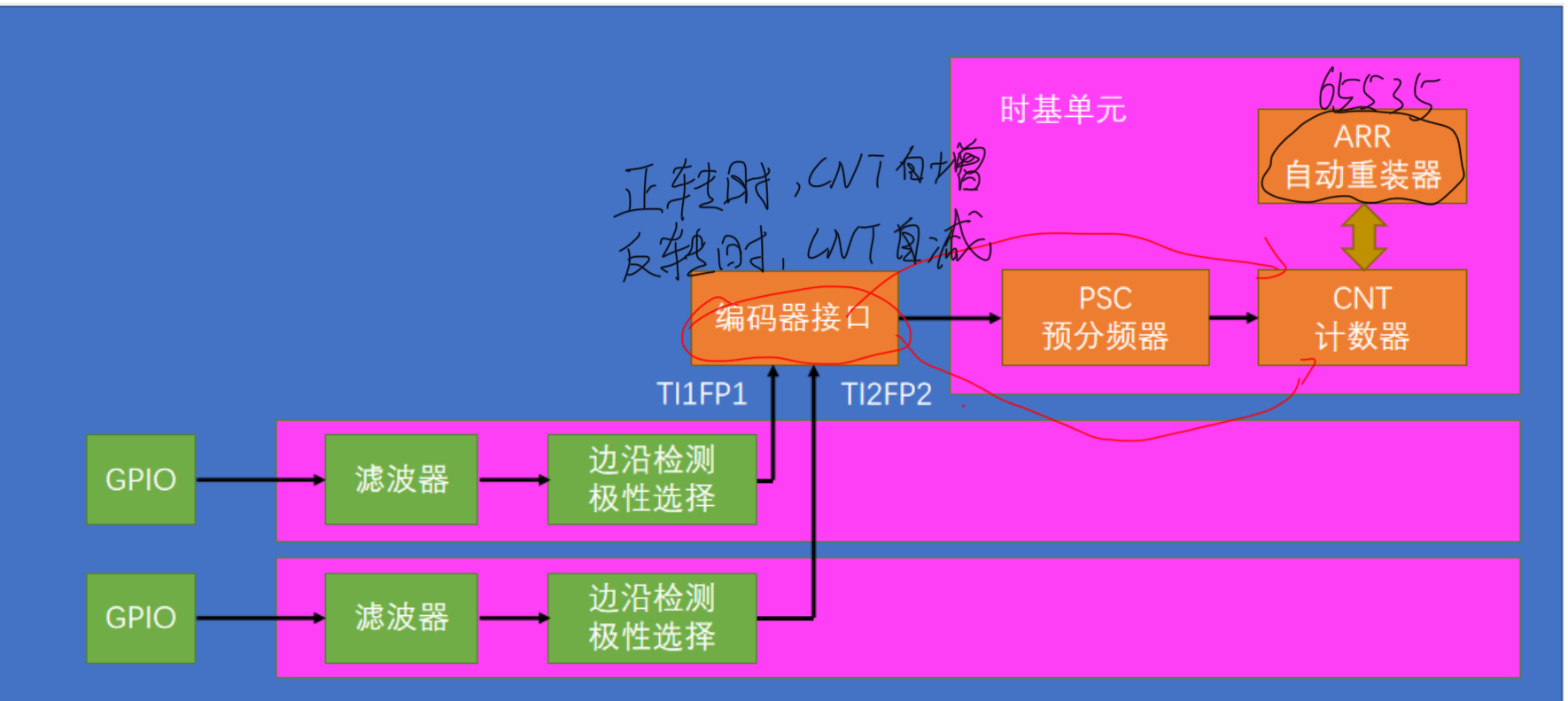
三、工作原理
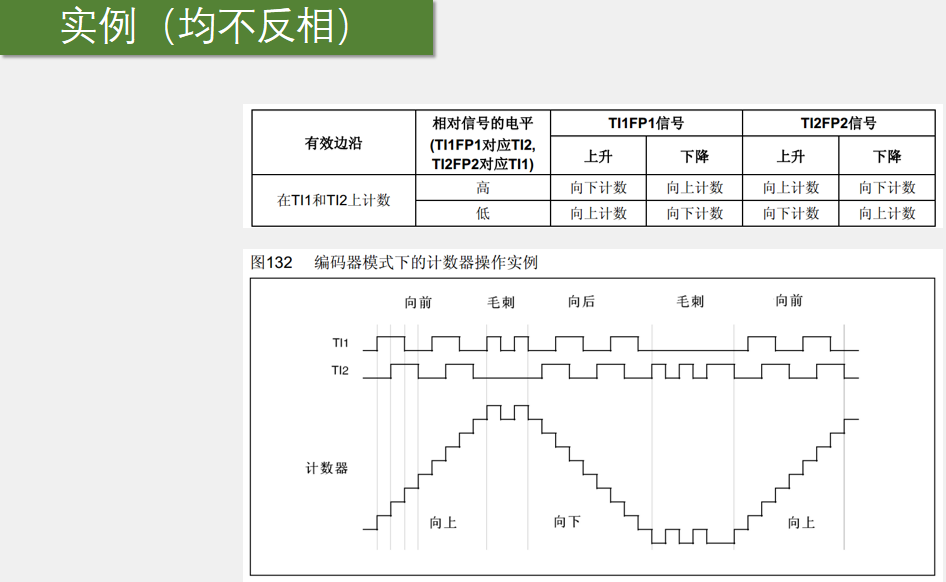
四、工作模式
五、代码
cpp
void TIM_EncoderInterfaceConfig(TIM_TypeDef* TIMx, uint16_t TIM_EncoderMode,
uint16_t TIM_IC1Polarity, uint16_t TIM_IC2Polarity);
//定时器编码器接口配置(1:定时器, 2:编码器模式 ,3:通道1的电平极性 ,4:通道2的电平极性)整体代码:
cpp
#include "stm32f10x.h" // Device header
void Encoder_init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3 ,ENABLE );
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode= GPIO_Mode_IPU; //选择复用推挽输出
GPIO_InitStruct.GPIO_Pin= GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStruct.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//不需要开启内部时钟,编码器接口就是一个带方向控制的外部时钟
//配置定时器时基单元
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.TIM_ClockDivision= TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode= TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period= 65536 - 1; //ARR自动重装器的值
TIM_TimeBaseInitStruct.TIM_Prescaler=1-1; //PSC预分频器的值,给0,不分频,编码器的时钟直接驱动计数器
TIM_TimeBaseInitStruct.TIM_RepetitionCounter= 0; //重复计数器的值
TIM_TimeBaseInit (TIM3 ,&TIM_TimeBaseInitStruct );
//编码器接口基本配置,输入捕获不需要全部用到只需要用到 : 滤波器,通道,极性方向
TIM_ICInitTypeDef TIM_ICInitStruct; //定义一个结构体变量
TIM_ICStructInit(&TIM_ICInitStruct); //给结构体赋一个初始值
TIM_ICInitStruct.TIM_Channel =TIM_Channel_1 ; //指定定时器输入捕获所使用的通道。
TIM_ICInitStruct.TIM_ICFilter = 0xF; //设置输入捕获滤波器的值,数值越大,滤波效果越强
TIM_ICInit(TIM3,&TIM_ICInitStruct); //相当于写入
TIM_ICInitStruct.TIM_Channel =TIM_Channel_2 ; //指定定时器输入捕获所使用的通道。
TIM_ICInitStruct.TIM_ICFilter = 0xF; //设置输入捕获滤波器的值,数值越大,滤波效果越强
TIM_ICInit(TIM3,&TIM_ICInitStruct); //相当于写入
TIM_EncoderInterfaceConfig(TIM3,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);
//定时器的编码器接口配置函数
//(1:定时器几,2:编码器模式选择TI1和TI2都计数,3:Rising是不反向,Falling是反向(反向就是往哪转是正,是相对的))
TIM_Cmd(TIM3,ENABLE); //开启定时器3
}
int16_t Encoder_Get(void)
{
return TIM_GetCounter(TIM3);
}
//如果用编码器测速的话,需要将上面的Get函数改一下,在固定的闸门时间读一次CNT,然后把CNT清零
//在主循环里,每间隔一段时间,Get一次,也就是delay_ms(1000);这是手转的延时,电机的话可以给短一点
//int16_t Encoder_Get(void)
//{
// int16_t Temp;
// Temp = TIM_GetCounter(TIM3);
// TIM_SetCounter(TIM3,0);
// return Temp;
//}