paper:LSKNet: A Foundation Lightweight Backbone for Remote Sensing
大型选择性内核块 (LSK Block)
功能
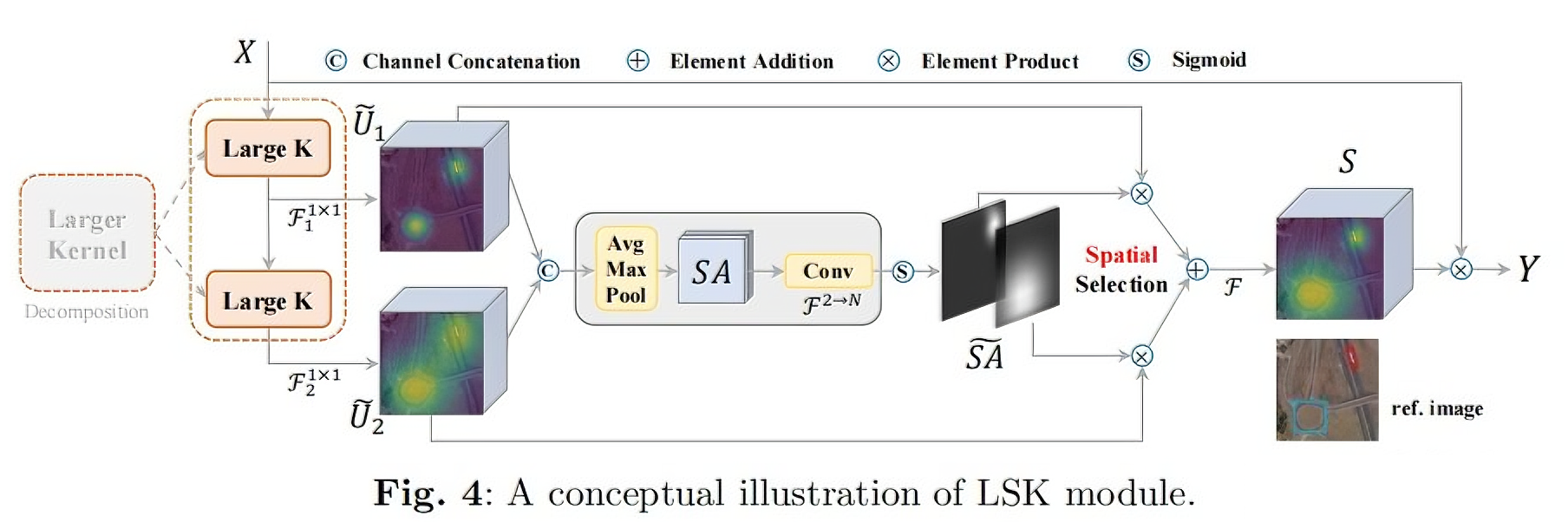
通过动态调整感受野,自适应提取遥感图像中目标的上下文信息,增强目标与环境关联的建模能力,适用于外观相似但环境差异显著的场景。
实现流程
-
大型内核卷积分解
:对输入 ( X X X ) 应用深度可分离卷积,生成多尺度特征图序列 ( U U U )。
-
通道混合
:将 ( U U U ) 拼接,通过 1x1 卷积生成特征图 ( e e e )。
-
空间内核选择
:对 ( e ) 进行平均池化和最大池化,生成描述符 ( A_{avg} ) 和 ( A_{max} )。
拼接后通过卷积生成空间注意力图 ( SA )。
应用 sigmoid 生成选择掩码 ( S A i SA_i SAi ),加权融合生成注意力特征 ( S )。
-
元素级乘法
:将 ( X ) 与 ( S ) 相乘,生成输出 ( Y )。
优势
- 动态调整感受野,适应不同目标的上下文需求。
- 深度可分离卷积降低计算复杂度。
- 增强目标与环境的特征关联,提升识别精度。
Large Selective Kernel Block结构图:
2、代码实现
python
import torch
import torch.nn as nn
class LSKblock(nn.Module):
def __init__(self, dim):
super().__init__()
self.conv0 = nn.Conv2d(dim, dim, 5, padding=2, groups=dim)
self.conv_spatial = nn.Conv2d(dim, dim, 7, stride=1, padding=9, groups=dim, dilation=3)
self.conv1 = nn.Conv2d(dim, dim // 2, 1)
self.conv2 = nn.Conv2d(dim, dim // 2, 1)
self.conv_squeeze = nn.Conv2d(2, 2, 7, padding=3)
self.conv = nn.Conv2d(dim // 2, dim, 1)
def forward(self, x):
attn1 = self.conv0(x)
attn2 = self.conv_spatial(attn1)
attn1 = self.conv1(attn1)
attn2 = self.conv2(attn2)
attn = torch.cat([attn1, attn2], dim=1)
avg_attn = torch.mean(attn, dim=1, keepdim=True)
max_attn, _ = torch.max(attn, dim=1, keepdim=True)
agg = torch.cat([avg_attn, max_attn], dim=1)
sig = self.conv_squeeze(agg).sigmoid()
attn = attn1 * sig[:, 0, :, :].unsqueeze(1) + attn2 * sig[:, 1, :, :].unsqueeze(1)
attn = self.conv(attn)
return x * attn
if __name__ == '__main__':
x = torch.randn(4, 64, 128, 128).cuda()
model = LSKblock(64).cuda()
out = model(x)
print(out.shape)
).cuda()
model = LSKblock(64).cuda()
out = model(x)
print(out.shape)