📘
一、电源子系统总览
在现代Linux内核中,电源管理不仅是系统稳定性的保障,也是实现高效能与低功耗运行的核心机制。
系统中涉及电源管理的关键子系统包括:
- I2C子系统:硬件通信基础
- Regulator子系统:电源输出抽象
- PMIC驱动:芯片寄存器操作执行
- Power-domain子系统:功能域电源策略控制
- Device Model子系统:支撑所有device/bus/driver关系
它们之间层次清晰,职责分明,共同支撑了完整的电源控制体系。
🔥 整体逻辑关系图
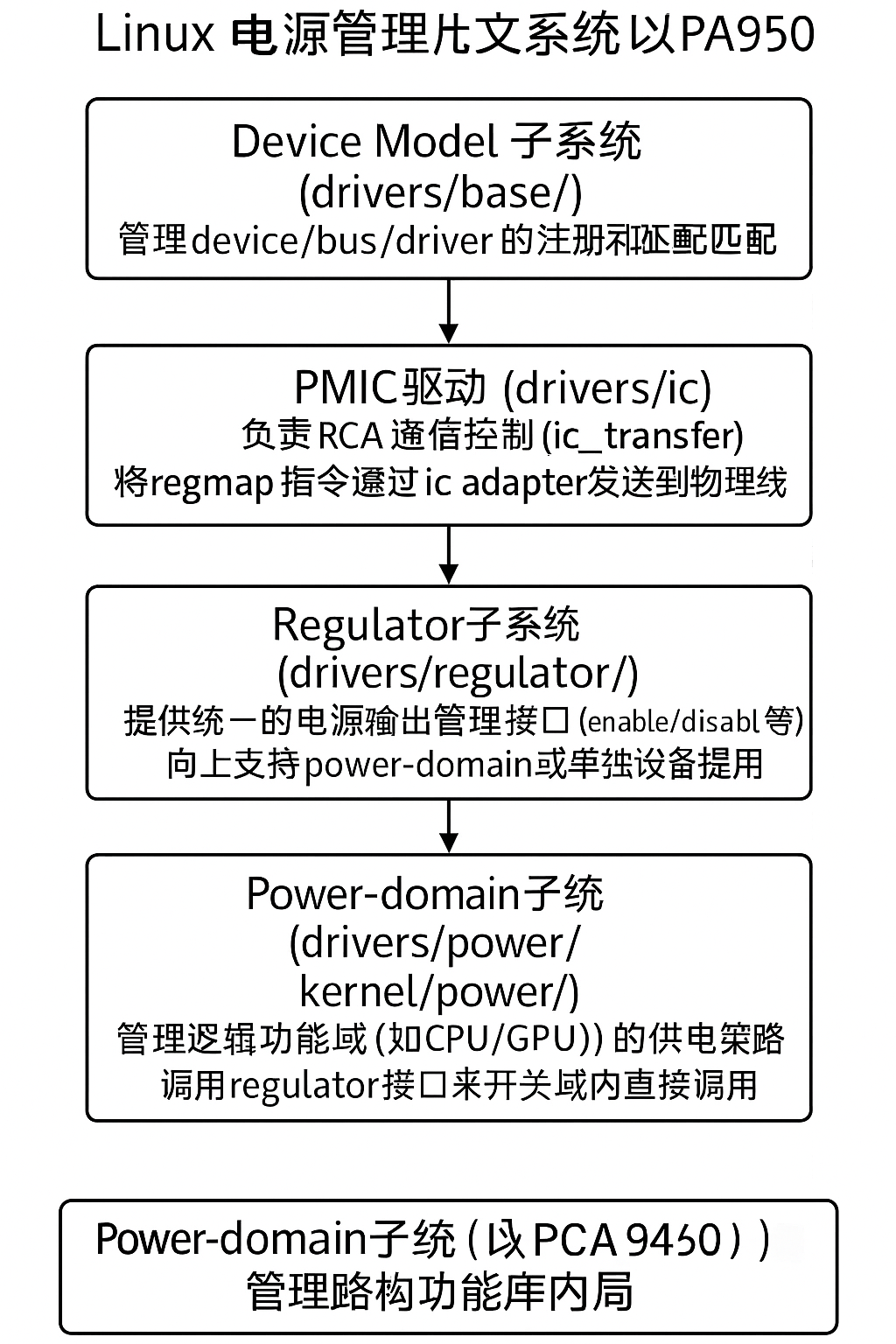
[Power-domain子系统]
↓ 调用 regulator 接口
[Regulator子系统]
↓ 调用 PMIC驱动注册的 regulator_ops
[PMIC驱动]
↓ 调用 regmap + i2c API
[I2C子系统]
↓
[I2C适配器硬件驱动]
↓
[PMIC芯片(如 PCA9450)]同时所有 device/driver 挂接由 Device Model 统一管理。
二、I2C子系统详解
✏️ 基础定义
I2C(Inter-Integrated Circuit)是一种简单而高效的串行总线协议,用于连接微控制器与外设(如PMIC、传感器等)。
🏛️ 代码结构位置
- drivers/i2c/
- drivers/i2c/busses/(适配器驱动)
🔎 核心数据结构
| 结构体 | 作用 |
|---|---|
| struct i2c_adapter | 表示I2C总线控制器(硬件控制器) |
| struct i2c_client | 表示I2C总线上一个从设备(如PMIC) |
| struct i2c_driver | 设备驱动程序,负责与i2c_client匹配 |
🛠️ 调用链示例
c
regmap_write(regmap, reg, val)
↓
i2c_transfer(adapter, msgs, num)
↓
adapter->master_xfer()
↓
发送I2C信号到总线✅ 小结:I2C子系统专注于数据可靠传输,不关心具体设备逻辑。
三、Regulator子系统详解
✏️ 基础定义
Regulator子系统统一管理系统中所有可以动态控制的电源输出,提供标准接口给上层(如power-domain、驱动程序)。
🏛️ 代码结构位置
- drivers/regulator/
🔎 核心概念与结构体
| 结构体 | 作用 |
|---|---|
| struct regulator_desc | 定义regulator属性(电压范围、步进等) |
| struct regulator_ops | 定义控制方法(enable/disable/set_voltage) |
| struct regulator_dev | 注册后的regulator实例对象 |
🔗 调用链逻辑
c
regulator_enable(dev)
↓
找到regulator_dev
↓
调用 regulator_ops->enable()
↓
PMIC驱动操作寄存器🛠️ 真实代码示例(PCA9450)
c
static const struct regulator_ops pca9450_buck_regulator_ops = {
.enable = regulator_enable_regmap,
.disable = regulator_disable_regmap,
.set_voltage_sel = regulator_set_voltage_sel_regmap,
.get_voltage_sel = regulator_get_voltage_sel_regmap,
};✅ 小结:Regulator子系统是电源控制的标准抽象,所有开关/调压动作通过它完成。
四、PMIC驱动工作机制
✏️ 基础定义
PMIC(Power Management IC)集成多个电源模块(Buck/LDO等),PMIC驱动负责初始化芯片并注册各个电源通道到regulator子系统。
🏛️ 代码结构位置
- drivers/regulator/pca9450.c
🔎 主要工作
- 解析设备树(I2C地址、中断号、regulator属性)
- 使用
devm_regulator_register()注册regulator - 调用
regmap框架,通过i2c操作寄存器
🛠️ PCA9450代码片段
c
rdev = devm_regulator_register(dev, &pca9450a_regulators[i].desc, &config);✅ 小结:PMIC驱动是连接硬件与Regulator框架的桥梁。
五、Power-domain子系统概览
✏️ 基础定义
Power-domain(电源域)是指一个可独立控制上电/断电的功能块,比如GPU、ISP、VPU等模块。
Power-domain子系统(GENPD)统一调度各域的电源状态。
🏛️ 代码结构位置
- drivers/power/
- kernel/power/
🔎 主要机制
- 设备通过设备树绑定 power-domains 属性
- Runtime PM框架触发 suspend/resume
- Power-domain 调用 regulator 开关电源
🛠️ 设备树示例
dts
gpu: gpu@0 {
power-domains = <&gpu_pd>;
};
power-domain@1 {
compatible = "fsl,imx8mq-gpu-pd";
#power-domain-cells = <0>;
};✅ 小结:Power-domain更关注逻辑域整体电源状态,而非单个电源输出。
六、从设备树到硬件动作的完整调用链
🔥 完整逻辑图
设备树 (dts)
↓
平台设备注册 (of_platform_populate)
↓
绑定power-domains属性 (of_genpd_bind)
↓
Runtime PM 调用 pm_runtime_suspend/resume
↓
调用genpd power_off/power_on
↓
调用 regulator_disable/enable
↓
PMIC驱动执行寄存器操作 (regmap+i2c_transfer)
↓
PMIC芯片控制 Buck/LDO 模块🛠️ 真实例子小节
- PCA9450注册6个Buck+5个LDO
- GPU模块通过Power-domain统一管理供电
- 实际动作由regulator调到PMIC驱动,再经i2c传输完成
七、系统总结与思考
✏️ 层次总结
| 层次 | 内容 |
|---|---|
| 策略层 | power-domain子系统 |
| 抽象层 | regulator子系统 |
| 设备层 | PMIC驱动(如PCA9450) |
| 通信层 | I2C子系统 |
| 基础层 | Device Model(统一管理device/driver) |
🚀 工程启示
- 严格分层设计:每一层职责单一、接口标准
- 模块独立演进:I2C、Regulator、PMIC驱动可以独立修改升级
- 统一设备树描述:软硬件灵活适配,简化系统集成
✅ 当你掌握了这套体系,就能真正驾驭嵌入式Linux电源管理架构,具备解决复杂功耗优化与系统稳定性问题的能力!
📺 视频教程请关注 B 站:"嵌入式Jerry"