笔者在2022年开始学习目标检测的时候,对各种框的概念那是相当混淆,比如:
- 中文名词:边界框、锚框、真实框、预测框等
- 英文名词:BoundingBox、AnchorBox、Ground Truth等
同一个英文名词比如BoundingBox翻译成中文也有多个叫法。下面注重区分这些概念。
一、真实框Ground Truth & 边界框Bounding Box
1️⃣真实框Ground Truth与边界框Bounding Box的定义
目标检测需要识别图片中多个物体的位置与类别。
为了方便模型训练,我们人为地将图片中物体的位置与种类标注出来,这就是真实边界框Ground Truth。
- 「Ground Truth」等价于「Ground Truth Bounding Box(GT BBox)」
边界框Bounding Box则更多的是一种泛指,它可以指代各个类型的框。
2️⃣GT BBox的标注常见于两种形式:
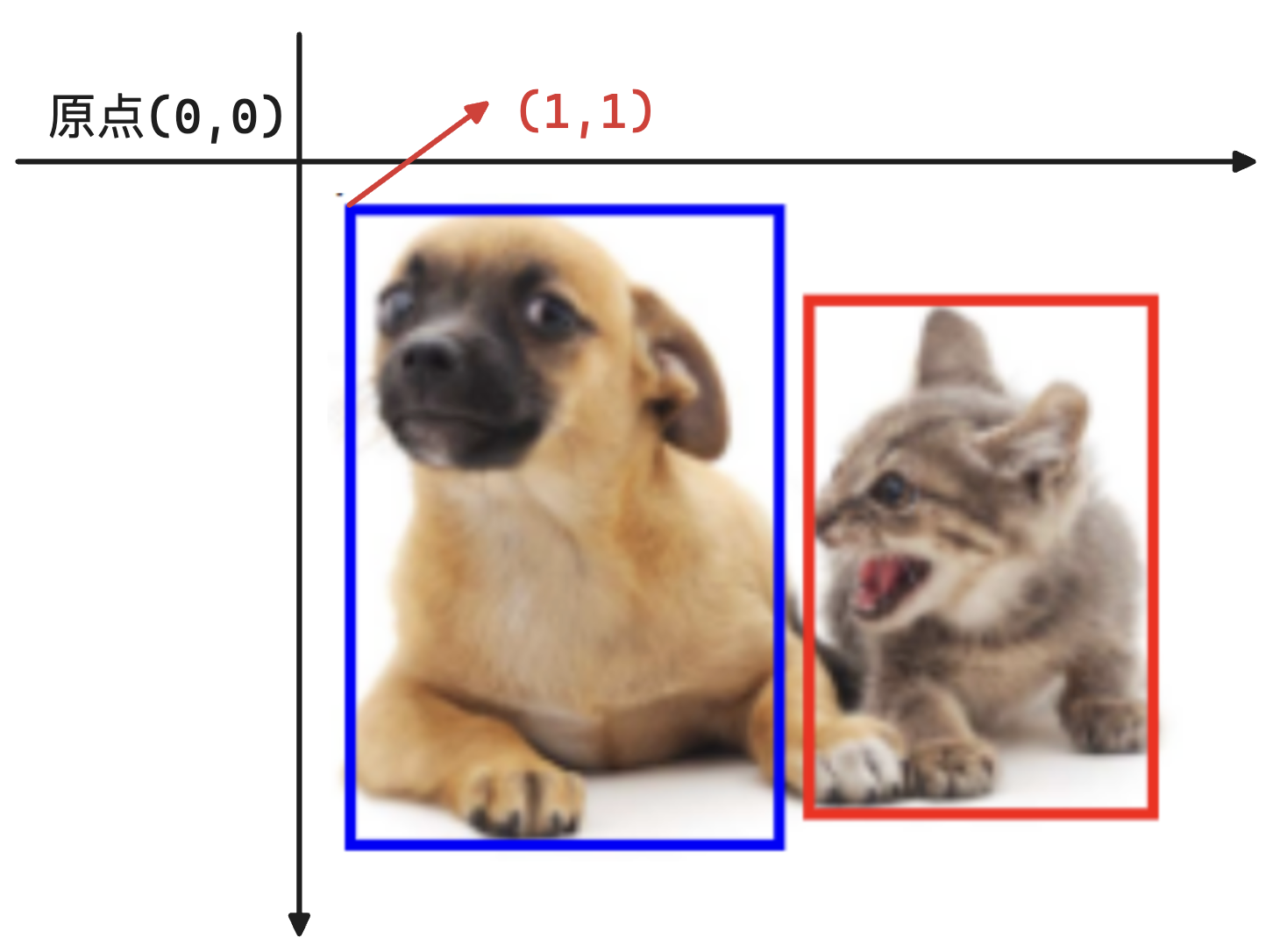
- PascalVOC的xml标注文件: ( x 1 , y 1 , x 2 , y 2 ) (x_1, y_1, x_2, y_2) (x1,y1,x2,y2),分别是矩形框左上角、右下角的坐标;
如下图中的坐标(1, 1)。 - COCO的json标注文件: ( x , y , w , h ) (x, y, w, h) (x,y,w,h),xy是矩阵框的中心点坐标,wh是矩阵框的宽高;
标注文件中每行表示一个物体,一般是:图片文件名、物体类别、边缘框。
二、边界框的回归 BoundingBox Regression
模型对其「预测框」进行微调,使其接近Ground Truth Bounding Box。
如下图对红色的BBox回归,使其接近绿色的GT Box。

三、锚框Anchor Box
1️⃣Ground Truth Bounding Box与Anchor的区别:
锚框Anchor是算法自动生成出的,GT BBox是人为的标注框。
目前定位精准的目标检测算法还是基于锚框的,即Anchor-based。
2️⃣锚框的使用:
是 在训练集上利用k-means等方法聚类出多个大小宽高不同的锚框 预测:每个锚框中是否含有目标物体 预测:从该锚框到边界框的偏移
3️⃣在目标检测任务中,我们如何选择锚框尺寸?
1)要么设定好锚框的尺寸:
yaml
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/322)要么通过k-means自动生成锚框,比如yolov5默认通过k-means自动生成锚框尺寸
3)作为超参数学习。我还没见过,估计这会产生额外的计算量
4️⃣锚框的标注过程
主流的目标检测算法大多基于锚框Anchor Box,每一个锚框都是一个训练样本。
对于每个锚框,要么标注成背景(负样本),要么关联上一个真实边界框(正样本)。
一张图片可能会产生上万个锚框,其中绝大多数都是背景,即大量的负样本,与之相比,正样本可能只有几十个。
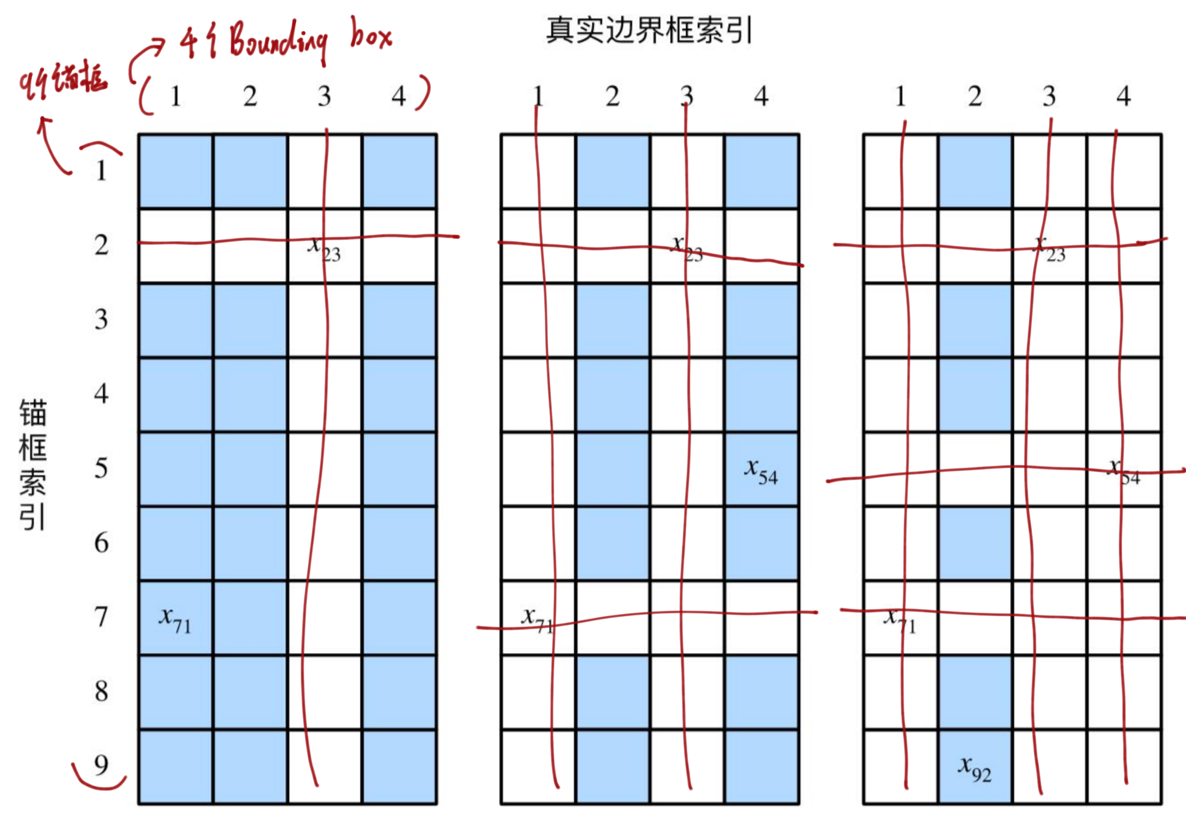
图. 锚框的标注
- 假设4个目标物体对应着4个GT BBox,模型对每个目标物体各生成9个锚框;
- 计算每个GT与Anchor之间的IoU值,找到当前最大的IoU值 x 23 x_{23} x23,将锚框关联上BBox_3,由它去预测BBox_3。删去该行该列;
- 继续找当前最大的IoU值 x 71 x_{71} x71,重复如上操作,删去该行该列;
与BBox关联的锚框作为正样本 ,其他的作为背景就是负样本。
PS:Anchor的概念最早出现在Faster RCNN 提出的RPN网络 ,RPN网络的Anchor启发了后面的SSD 和Yolov2算法。
四、额外:召回与排序的概念
召回:将所有"可能的正确结果"返回给排序
排序:会将所有召回的结果进行排序,将最靠前的结果作为最终答案
如果这篇文章对您有些许帮助,请帮忙点个赞👍或收个藏📃。您的支持是我继续创作的动力💪!
不要害怕,不要着急。保持每日的前进☀️与积极的内心❤️,命运总在曲折中馈赠最好的礼物。