基于STM32定时器中断讲解(HAL库)
1、定时器简单介绍
以STM32F103C8T6中几个定时器为例:
- TIM1:这是一个高级定时器,不仅具备基本的定时中断功能,还拥有内外时钟源选择、输入捕获、输出比较、编码器接口以及主从触发模式等多种功能。这使得TIM1能够适用于各种复杂的应用场景,为开发者提供强大的时间控制和信号处理能力。
- TIM2、TIM3和TIM4:这些是通用定时器,同样具有定时功能,但在功能上与高级定时器有所区别。通用定时器通常用于实现一些基本的定时任务,如LED闪烁、脉冲宽度测量等。
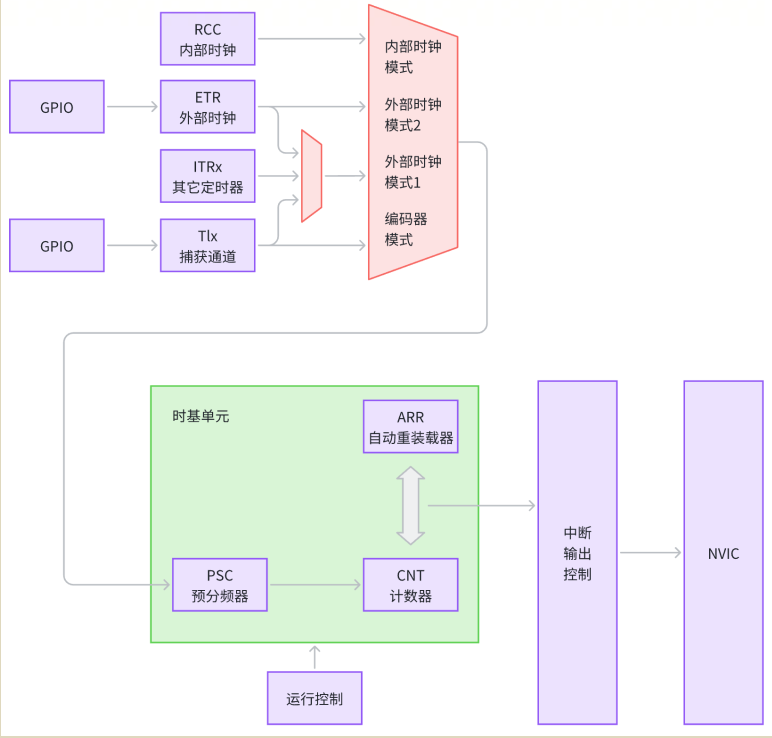
每个定时器都由一个**16位计数器、预分频器和自动重装寄存器的时基单元组成。**预分频器可以对时钟进行分频,计数器则对预分频后的时钟进行计数。当计数器的值达到设定值时,会触发中断,从而执行相应的定时任务。
以下是总结框图

2、定时器工作原理
定时器核心是计数器。
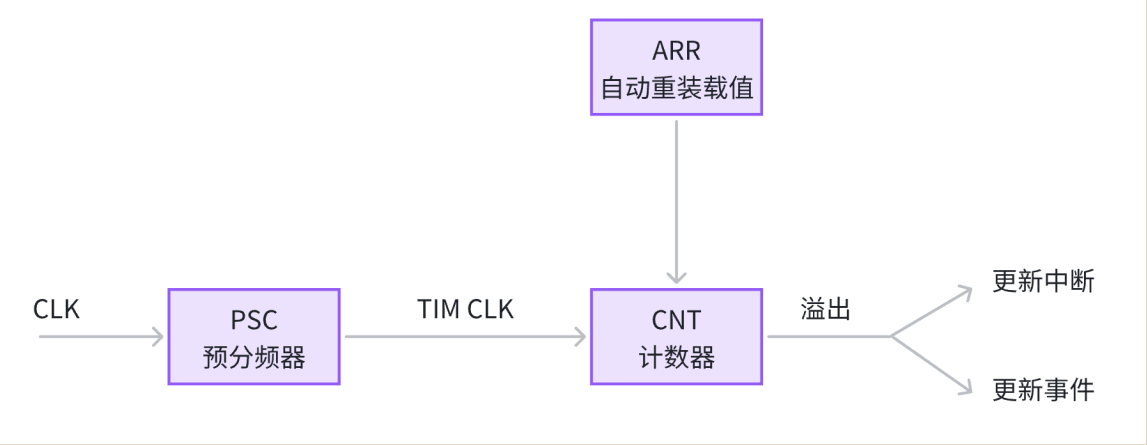
讲解:首先时钟源经过预分频器(一般为72MHZ/36MHZ),内部一般取72,然后进行计数,当计数器时间超过预设时间,则会产生中端。ARR是为了将CNT进行自动清空,重新计数。
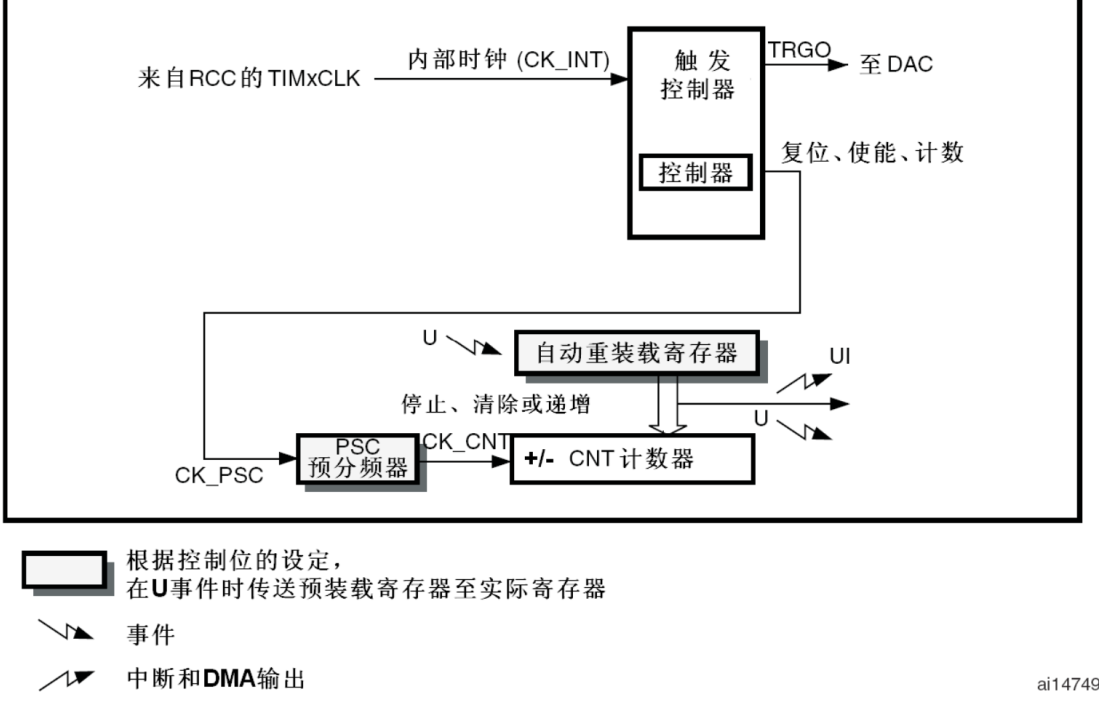
3、定时器框图
参考stm32f103c8t6中文参考手册:
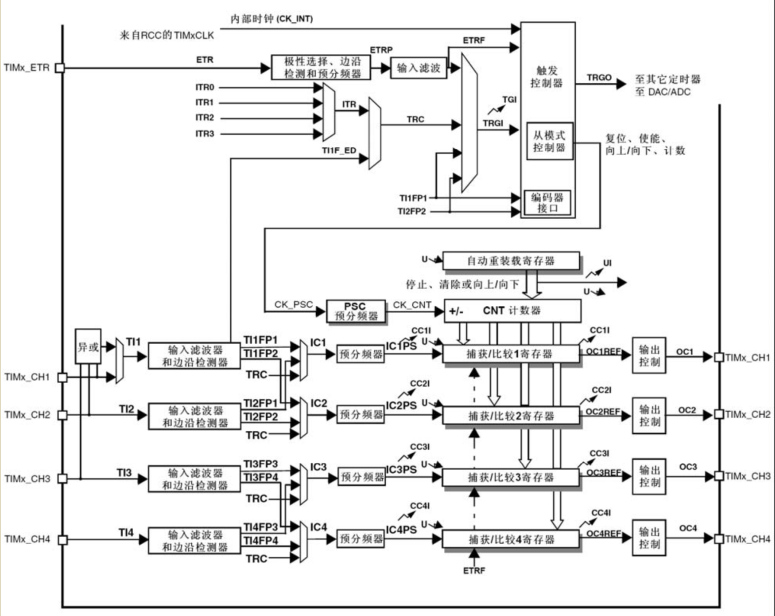
为防止看不同,特地将此图进行简化,以下是简化图:
结合手册进行观看。【注意:PSC写0则为1分频】
4、定时器计数模式
计数模式主要分为向上计数、向下计数、中心对齐计数。

下图为三种计数方式的图解:
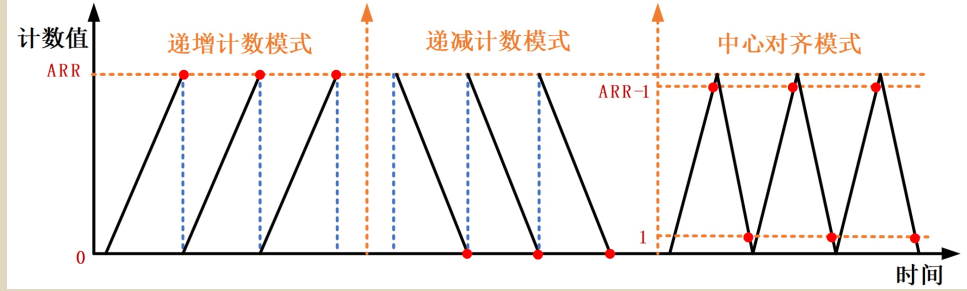
当溢出时则会触发中断。一般采用向上计数。
5、定时器溢出时间计算
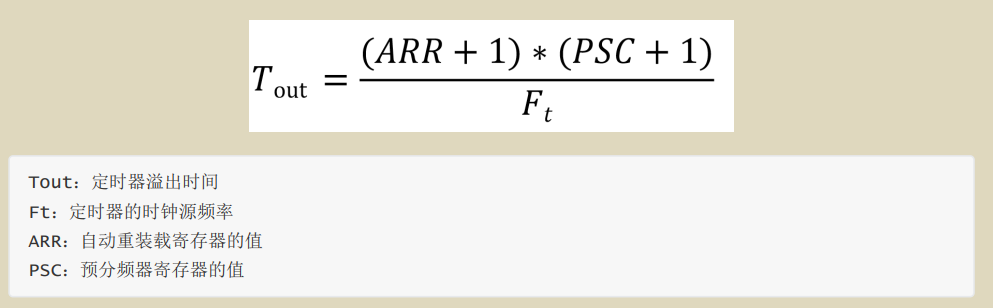
举例:如用内部时钟源72MHZ则(PSC+1)/F=T=1/f,表示计一个数所用的时间。ARR为重装载,根据所需要的时间Tout来配置重装载(ARR+1)表示要计的数目。
比如要计500ms,则ARR可以为4999,PSC为7199。
6、定时器中断的配置
c
#include "timer.h"
#include "led.h"
TIM_HandleTypeDef timer_handle = {0};//定义结构体
//时基工作参数配置
void timer_init(uint16_t ARR,uint16_t PSC)//传入ARR自动重装寄存器和PSC分频(16位寄存器)
{
timer_handle.Instance = TIM2;//用哪个时钟
timer_handle.Init.Prescaler = PSC;//PSC分频
timer_handle.Init.Period = ARR;//传入ARR自动重装寄存器的值
timer_handle.Init.CounterMode = TIM_COUNTERMODE_UP;//计数模式向上计数
timer_handle.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;//自动重载寄存器(可用可不用)
HAL_TIM_Base_Init(&timer_handle);
HAL_TIM_Base_Start_IT(&timer_handle);
}
//map函数
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *htim)//弱函数经常被其他函数直接自动调用
{
if(htim->Instance == TIM2)
{
__HAL_RCC_TIM2_CLK_ENABLE();
HAL_NVIC_SetPriority(TIM2_IRQn,2,2);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
}
}
//中断服务函数编写
void TIM2_IRQHandler(void)
{
HAL_TIM_IRQHandler(&timer_handle);//公共中断函数
}
//回调函数配置
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)//弱函数经常被其他函数直接自动调用
{
if(htim->Instance == TIM2)
{
led_toggle();//写入功能,根据自己需要进行完善
}
}
//弱函数拿指针定义,其余拿变量 附图: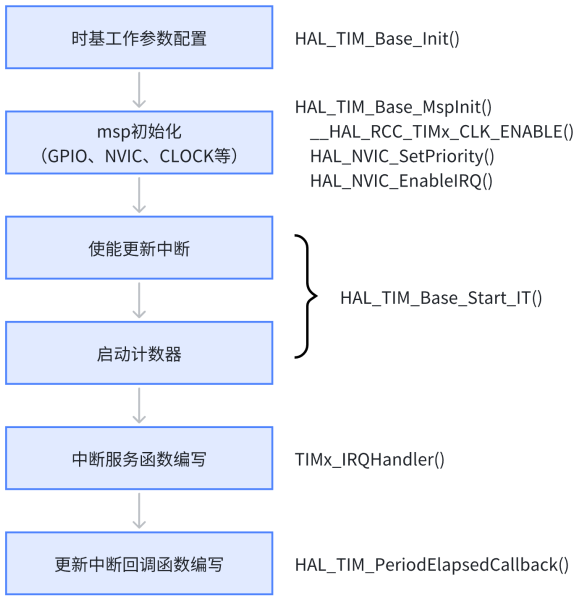
定时器中断配置图。