这里写自定义目录标题
尝试将solidrwork的模型导入到matlab中,以下是官方给出的设计步骤,冲啊
To use Simscape Multibody Link, you must install MATLAB® and the CAD applications on the same computer. To ensure the successful installation of Simscape Multibody Link, before launching your CAD application, you must register MATLAB as an automation server and enable the Simscape Multibody Link plugin in the CAD application. For more information, see steps 3 and 4.
Step 1: Get the Installation Files
Go to the Simscape Multibody Link download page.
Follow the prompts on the download page.
Select and save the ZIP and MATLAB files that match your MATLAB version and system architecture, such as release R2023b and Win64 (PC) Platform. Do not extract the ZIP file.
Step 2: Run the Installation Function
Run MATLAB as administrator. For more information, see How to Make a Shortcut to Run MATLAB as Administrator.
Add the folder in which you saved the installation files to the MATLAB path. For example, you can use the addpath (MATLAB) function.
At the MATLAB command prompt, enter installaddon('zipname'), where zipname is the name of the ZIP file, such as smlink-r2023b-win64.zip.
Step 3: Register MATLAB as an Automation Server
Each time you export a CAD assembly model, the Simscape Multibody Link plugin attempts to connect to MATLAB. To enable the connection, you must register MATLAB as an automation server. You can do this in two ways:
Open a MATLAB session in administrator mode. At the MATLAB command prompt, enter regmatlabserver.
Open a Windows® command prompt window running in administrator mode. At the command prompt, enter matlab -regserver.
Step 4: Enable the Simscape Multibody Link Plugin in a CAD Application
Before you can export a CAD assembly, you must enable the Simscape Multibody Link plugin on your CAD application. To do this, see:
Enable Simscape Multibody Link Plugin in SolidWorks
Enable Simscape Multibody Link Plugin in Creo-Pro/E
Enable Simscape Multibody Link Plugin in Inventor Plugin
Importing CAD Files from Applications Not Supported by Simscape Multibody Link
To import an Onshape® CAD assembly model into the Simscape Multibody, you can use the smexportonshape and smimport functions.
If you use a CAD application other than Onshape, SolidWorks, PTC Creo, and Autodesk Inventor, you can create a custom model export application based on the Simscape Multibody XML schema. This approach requires some knowledge of XML. See the schema web page for more information.
You can also create a Simscape Multibody model from a URDF file or Robotics System Toolbox™ model. See the smimport for more information.
在matlab命令行中输入smlink_linksw,再打开solidwork

在solidwork中tools--插件中找到simscape工具
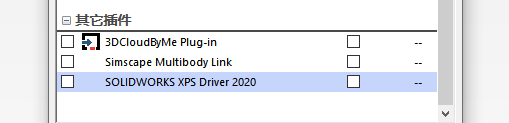
此时无法在soliwork中找到该插件:
After you enable the plugin, Simscape Multibody Link option is available when you start or open a SolidWorks assembly. To export an assembly model, on the menu bar, click Tools > Simscape Multibody Link > Export > Simscape Multibody.
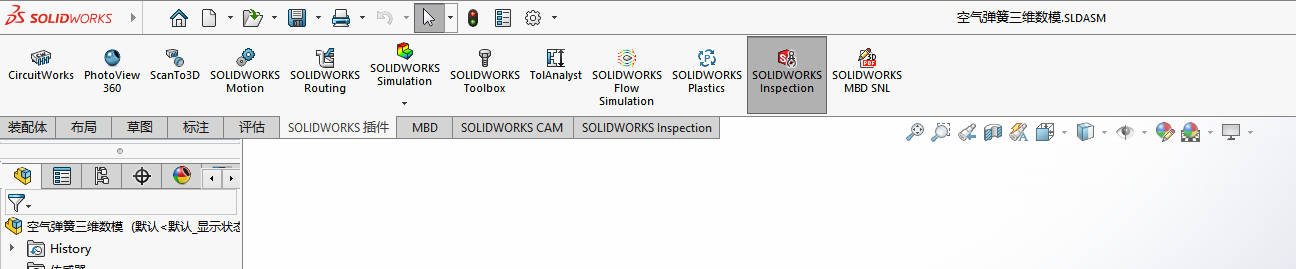
在工具中找到多体动力学菜单

生成xml文件
回到matlab中,使用smimport调用刚刚输出的文件
smimport("spring");
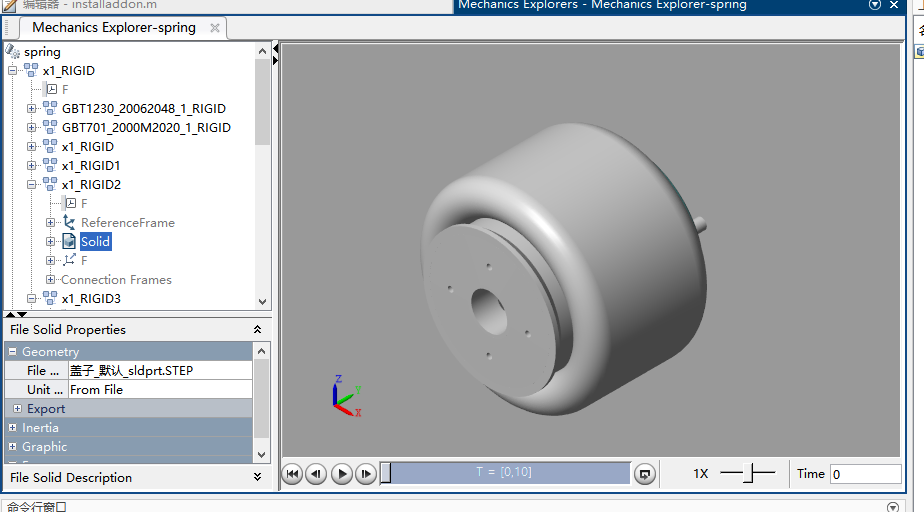
到此我们可以在matlab中装调这些零件了,加油吧小伙伴们。