本文通过实验验证CAN控制器的错误处理机制是否符合相关标准。具体而言,我们使用ZPS-CANFD设备(ZPS-CANFD介绍)作为测量工具,USBCANFD-200U作为被测设备(DUT),通过注入特定类型的错误,观察DUT的响应是否符合ISO16845-1:2016和ISO11898-1:2015标准的要求。

实验包括接收错误响应验证和发送错误响应验证两个部分。
1、测试环境
1.1、硬件准备
- ZPS-CANFD:作为测量设备,用于注入错误并捕获总线数据。ZPS-CANFD是广州致远电子开发的一款总线分析仪,支持CANFD、CAN和LIN总线的测试,适用于汽车电子和工业自动化领域。
- USBCANFD-200U:作为被测设备(DUT),其CAN控制器的错误处理机制需要验证。
1.2、软件准备
打开ZPS-CANFD和USBCANFD-200U的配套软件。

配置CAN通道参数,包括波特率和终端电阻,确保两者匹配。
开启CAN通道,ZPS-CANFD设置为"只听应答模式",以便于观察DUT的错误帧响应,而不干扰总线。
在CAN控制器的运行机制中,当接收到不同类型的错误时,错误帧的生成位置和REC(接收错误计数器)的增量会有所不同。本节通过两个实例验证DUT在接收错误时的响应。
2、实例一:CRC错误
验证目的
观察出现CRC错误后,错误帧生成位置是否符合标准。
观察出现错误帧后,REC递增是否符合标准。
预期结果
根据ISO16845-1:2016标准7.2.5小节,当DUT接收到CRC错误(CANFD帧)时,它将生成一个有效的错误帧,从CRC定界符后的第四位开始。
根据ISO16845-1:2016标准7.6.10小节,当DUT生成一帧错误帧后,其REC应增加1。
错误注入
在ZPS-CANFD软件的报文发送窗口,添加任意报文(例如ID为100的CANFD帧)。
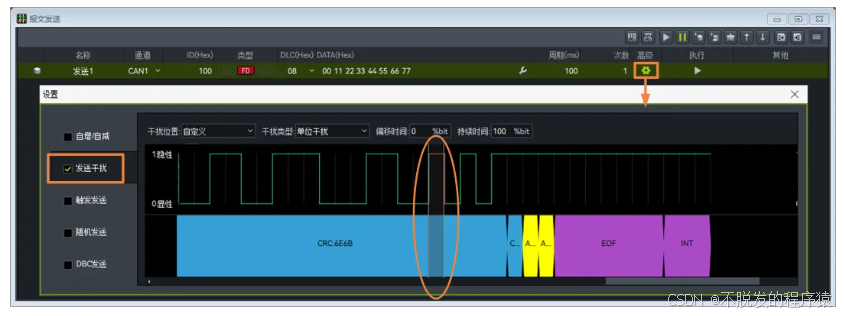
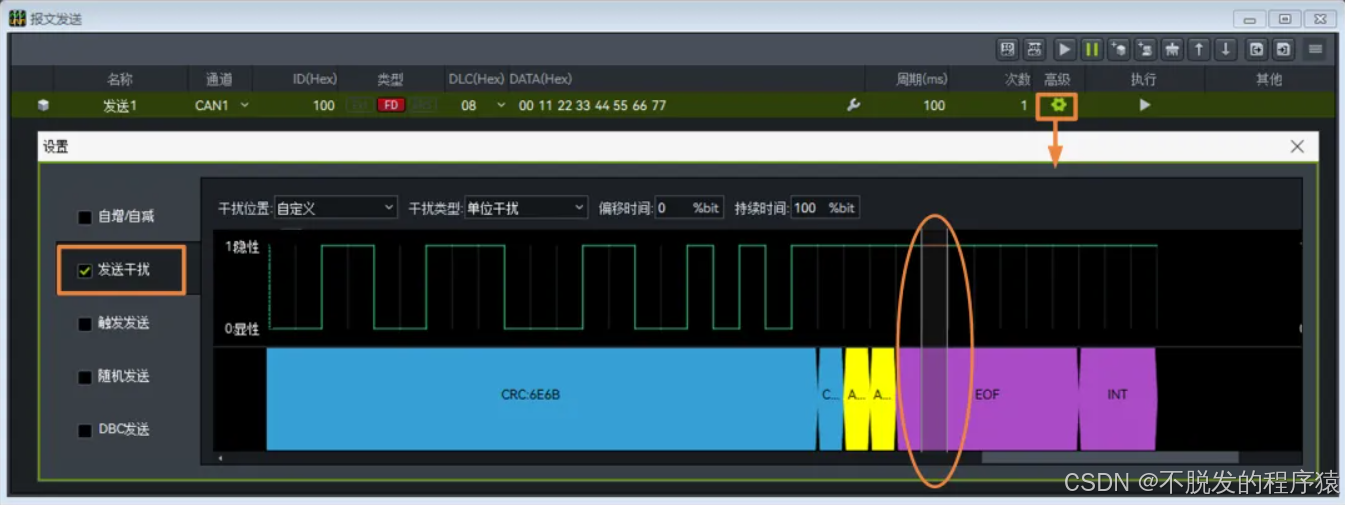
打开高级按钮,勾选"发送干扰",将干扰位置设置为"自定义",干扰类型选择"单位干扰"。
将干扰光标移到CRC字段的某个位(注意避开固定填充位),如下图所示。
验证结果

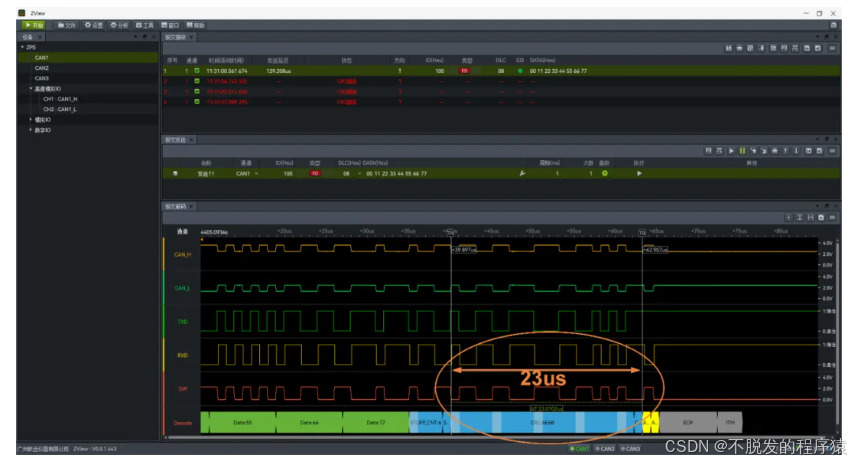
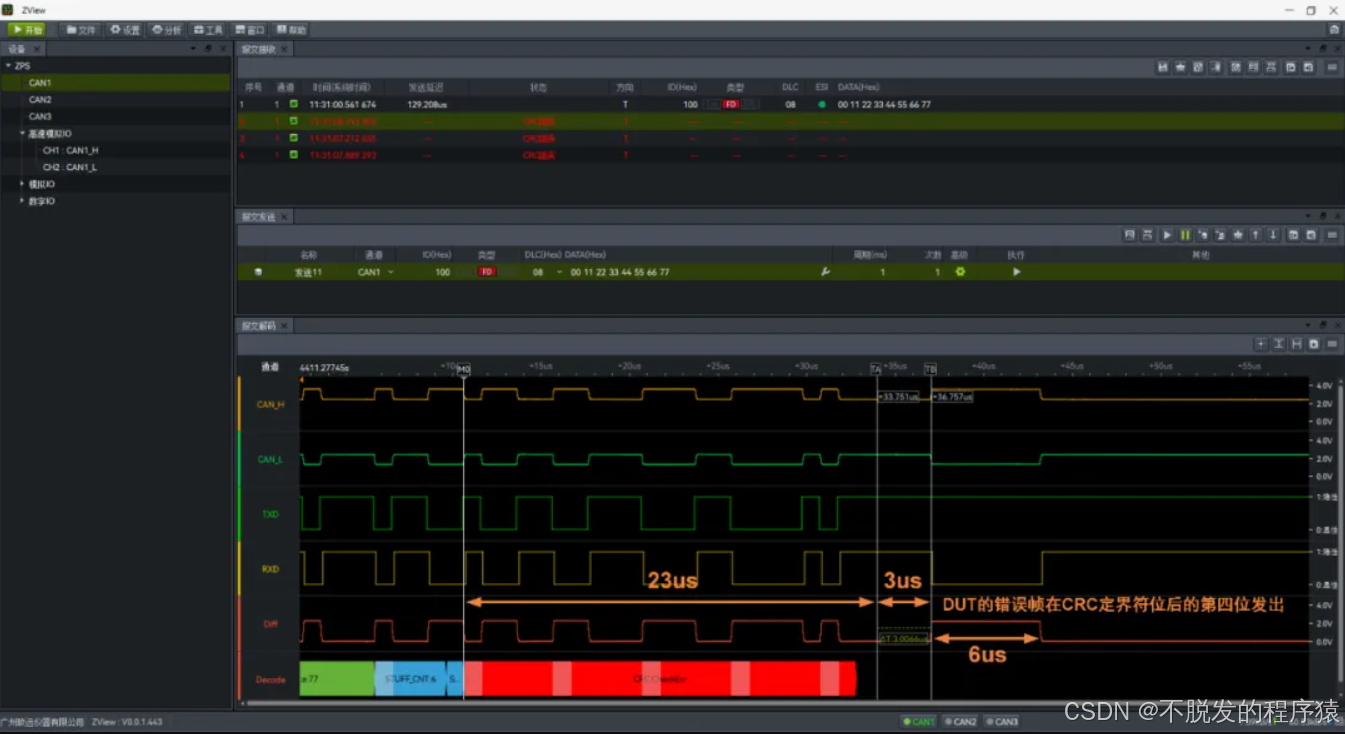
在ZPS-CANFD软件界面,观察错误帧波形。当DUT接收到CRC错误后,其错误帧从CRC定界符后的第四位开始发出,符合标准。下图分别展示了正确帧和错误帧的CRC定界符位置对比。
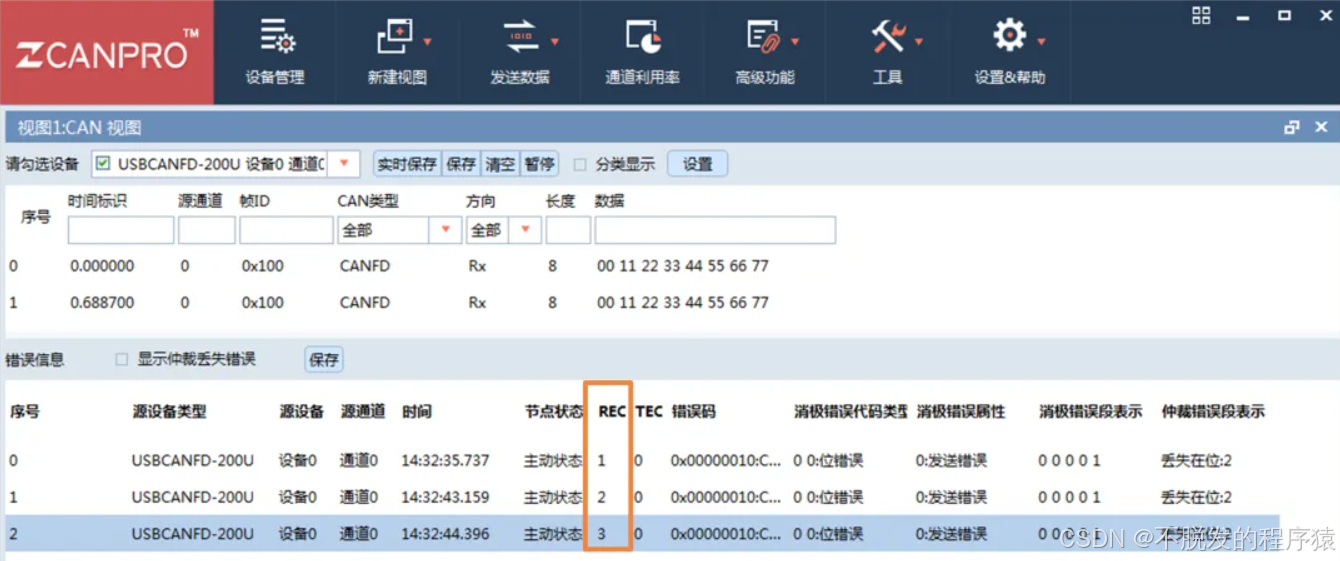
在DUT软件界面,观察错误信息。当出现一帧错误帧时,REC+1;出现两帧错误帧时,REC+2,以此类推,符合标准。如下图所示。
3、实例二:EOF错误
验证目的
观察出现EOF错误后,错误帧生成位置是否符合标准。
观察出现错误帧后,REC递增是否符合标准。
预期结果
根据ISO16845-1:2016标准7.2.10小节,当DUT接收到EOF错误时,它将生成一个有效的错误帧,从损坏位的下一位开始。
根据ISO16845-1:2016标准7.6.14小节和ISO11898-1:2015标准12.1.4.2小节,若REC起始值为0且ACK发送成功,REC保持为0;若REC起始值大于0且ACK发送成功,REC减1。
根据ISO16845-1:2016标准7.6.8小节,当DUT生成一帧错误帧后,其REC应增加1。
错误注入
在ZPS-CANFD软件的报文发送窗口,添加任意报文。
打开高级按钮,勾选"发送干扰",将干扰位置设置为"自定义",干扰类型选择"单位干扰"。
将干扰光标移到EOF位,如下图所示。
验证结果
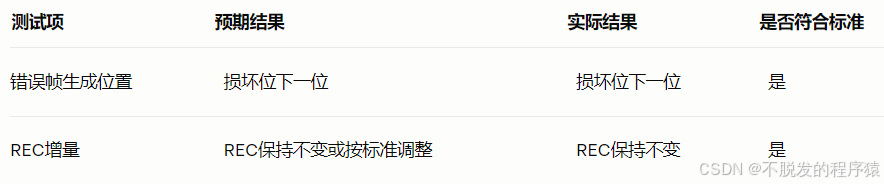
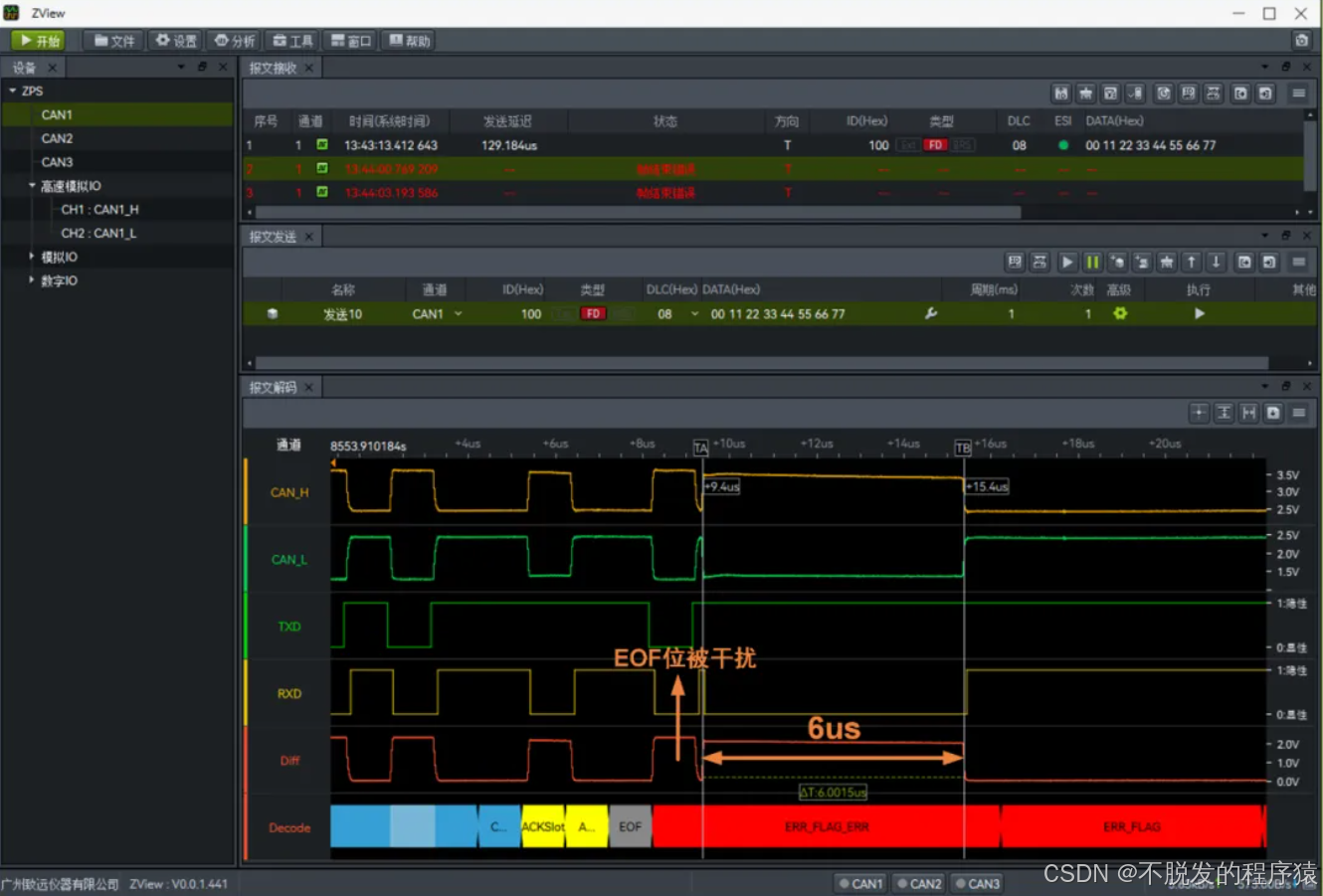
在ZPS-CANFD软件界面,观察错误帧波形。当DUT接收到EOF错误后,其错误帧在该位之后的第一位开始发出,符合标准。如下图所示。
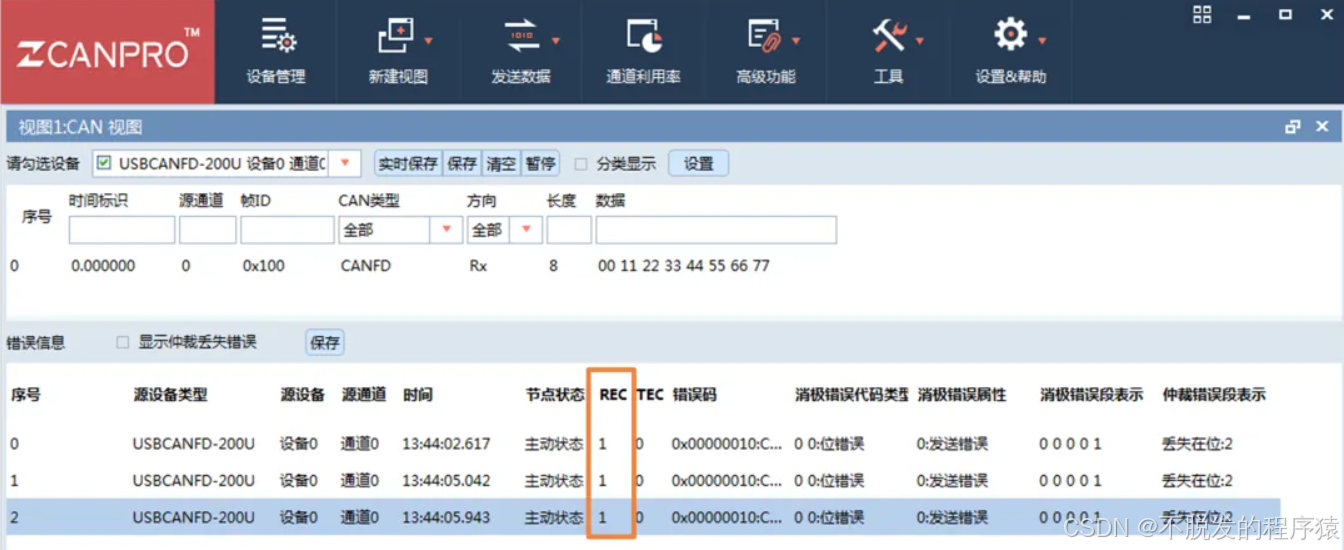
在DUT软件界面,观察错误信息。当出现一帧错误帧时,REC保持初始值,符合标准。例如,若REC初始值为1,因为EOF错误出现在ACK之后,ACK发送成功,REC-1;EOF错误发生,REC+1,因此REC值不变。如下图所示。
4、实例三:CRC定界符错误
验证目的
观察出现CRC定界符错误后,错误帧生成位置是否符合标准。
观察出现错误帧后,TEC递增是否符合标准。
预期结果
根据ISO16845-1:2016标准8.2.5小节,当DUT发送报文的CRC定界符位被破坏后,它将生成一个有效的错误帧,从损坏位的下一位开始。
根据ISO16845-1:2016标准8.6.7小节,当DUT生成一帧错误帧后,其TEC应增加8。
错误注入
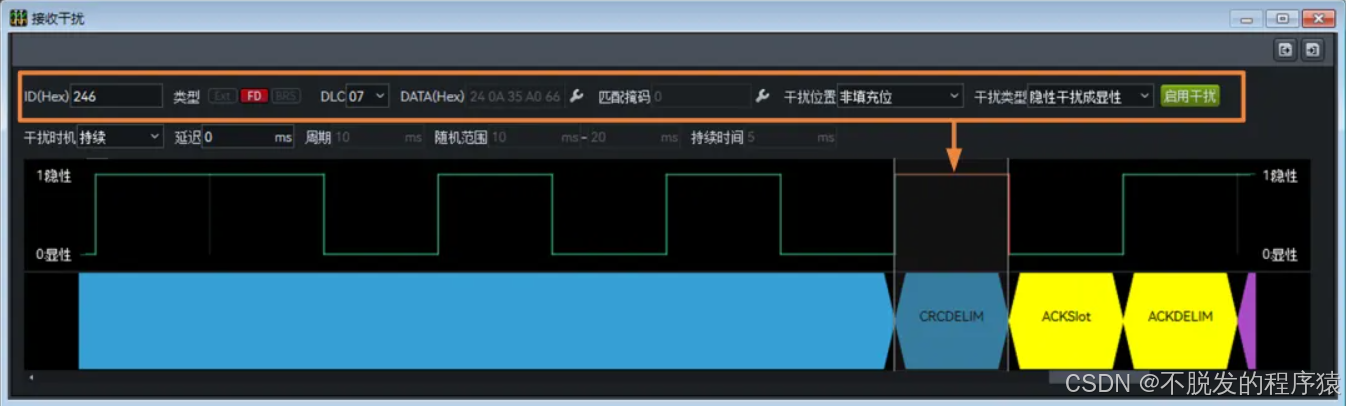
在ZPS-CANFD软件的被动接收干扰窗口,根据DUT发送的报文设置帧数据和干扰位置。
将干扰光标放到"CRC定界符"位,干扰类型选择"隐性干扰为显性",并启动干扰,如下图所示。
验证结果
在ZPS-CANFD软件界面,观察错误帧波形。当DUT的CRC定界符位被干扰后,其错误帧在该位之后的第一位开始发出,符合标准。如下图所示。

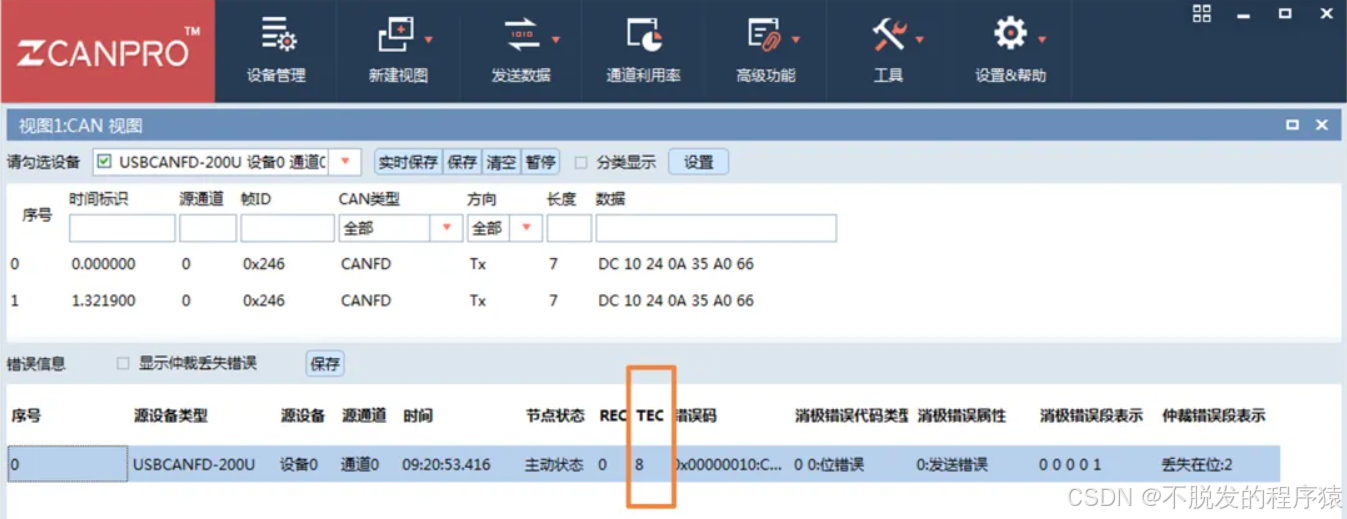
在DUT软件界面,观察错误信息。当发送一帧错误帧时,TEC+8;发送两帧错误帧时,TEC+16,以此类推,符合标准。如下图所示。
通过以上实验,我们验证了USBCANFD-200U的CAN控制器在接收和发送过程中对CRC错误、EOF错误和CRC定界符错误的响应完全符合ISO16845-1:2016和ISO11898-1:2015标准的要求。具体而言:
- 在接收错误测试中,DUT正确地在规定的位置生成错误帧,并根据标准调整REC值。
- 在发送错误测试中,DUT在发送过程中检测到错误时,也能正确生成错误帧,并相应地调整TEC值。
这些验证对于确保CAN总线系统的可靠性至关重要,尤其是在汽车电子和工业控制等对通信稳定性有严格要求的领域。通过使用ZPS-CANFD设备进行总线错误注入和分析,我们可以高效地验证CAN控制器的错误处理机制,从而提高系统的设计和调试效率。