参考程序:
cpp
#include <cstdio>
#include <vector>
#include <queue>
#include <utility>
#include <cstring>
using namespace std;
// 定义一个结构体,用于 Dijkstra 优先队列中的节点
struct Node {
int v, w; // v 表示图中的节点编号,w 表示当前从源点到 v 的最短距离
bool operator < (const Node &b) const {
// C++ 优先队列默认是大顶堆,这里重载为距离小的优先出队
return w > b.w;
}
};
// 假设最多 n 个挡板,我们编号为 1..n
const int MAXN = 10010; // 挡板数量上限(可根据题目数据范围调整)
const int INF = 2000000000;
// 图的邻接表表示,每个节点存储 (目标节点, 权值) 对
vector<pair<int,int>> G[MAXN*2]; // 每个挡板有两个端点,编号方案见下
// 存储挡板数据
int l[MAXN], r[MAXN], h[MAXN]; // l[i], r[i] 为挡板 i 的左右横坐标,h[i] 为高度
int n, s, t; // n 挡板个数,s 起点挡板编号,t 目标挡板编号
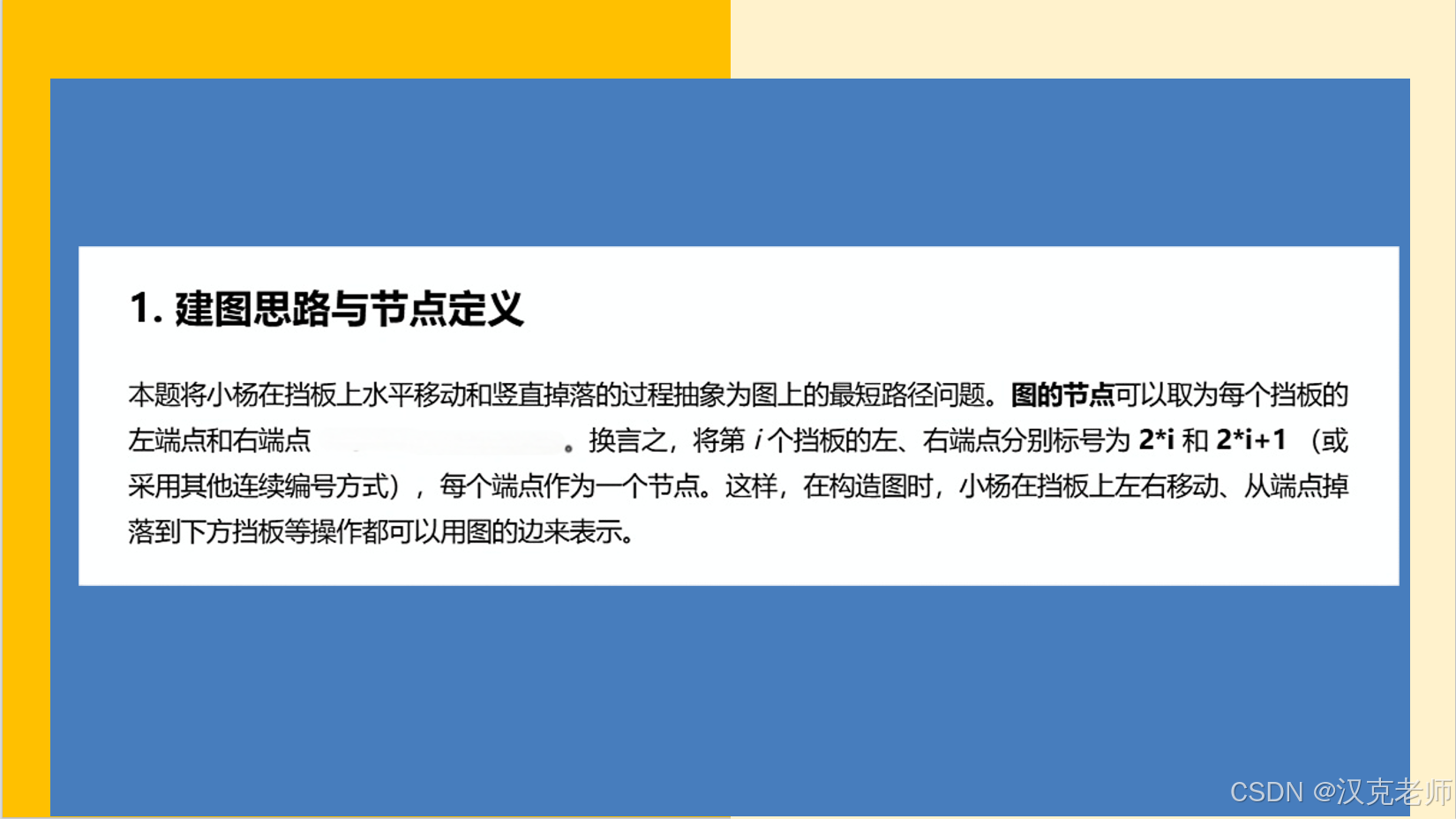
// 将挡板编号转换为节点编号:例如取左端点编号 2*i,右端点编号 2*i+1
inline int LL(int x) { return 2*x; }
inline int RR(int x) { return 2*x+1; }
// Dijkstra 算法求单源最短路
int dis[MAXN*2];
bool vis[MAXN*2];
void Dijkstra(int src) {
// 初始化距离为无穷大,标记都为未访问
for(int i = 0; i < 2*n+2; i++) {
dis[i] = INF;
vis[i] = false;
}
// 源点距离置 0,入队
dis[src] = 0;
priority_queue<Node> pq;
pq.push({src, 0});
while(!pq.empty()) {
Node cur = pq.top(); pq.pop();
int u = cur.v;
if(vis[u]) continue; // 如果已访问,跳过
vis[u] = true;
// 遍历所有从 u 出发的边
for(auto &edge : G[u]) {
int v = edge.first;
int w = edge.second;
if(!vis[v] && dis[v] > dis[u] + w) {
dis[v] = dis[u] + w; // 松弛
pq.push({v, dis[v]});
}
}
}
}
int main(){
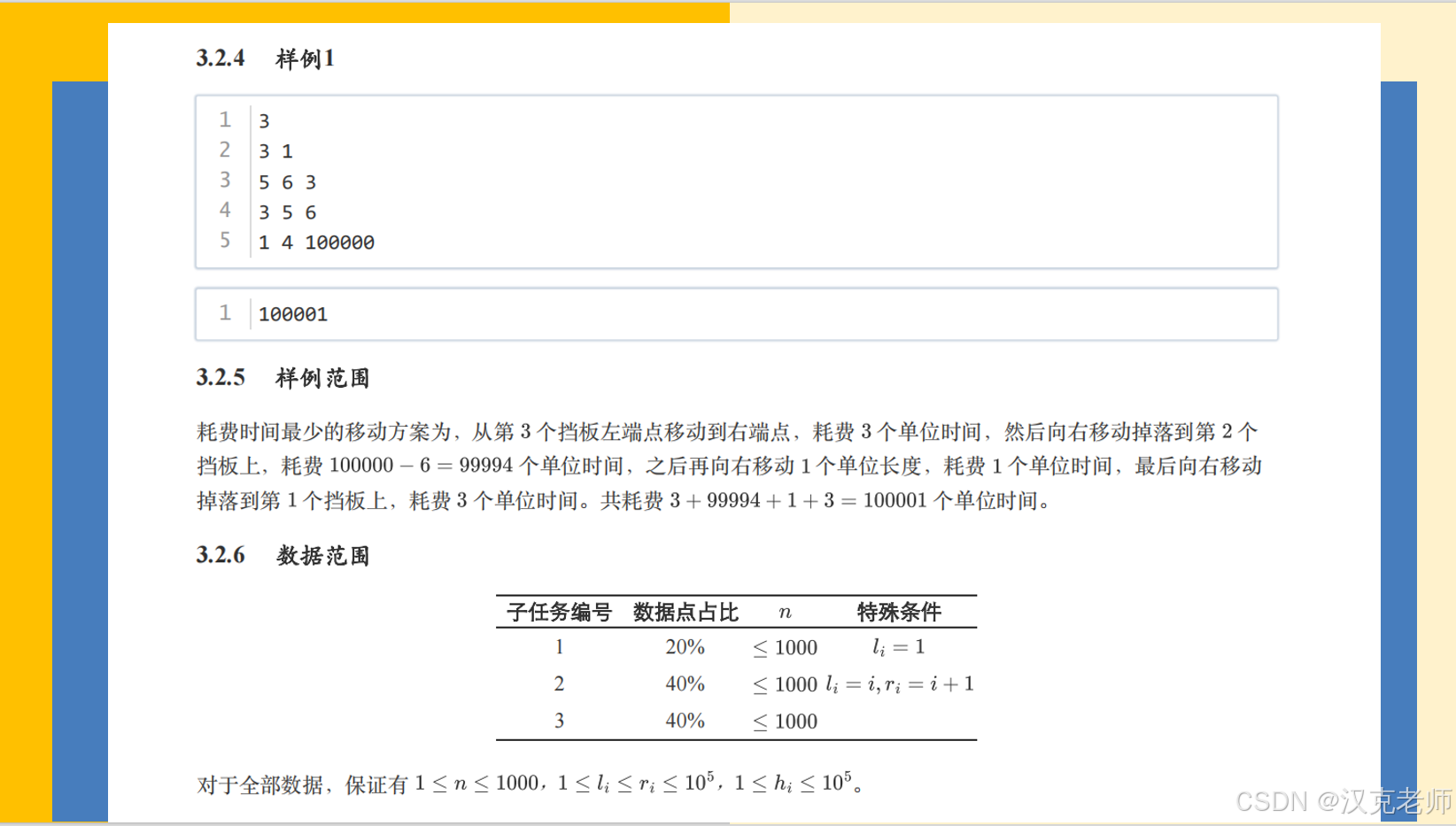
// 读入挡板数量和起点、终点挡板编号
scanf("%d %d %d", &n, &s, &t);
// 读入每个挡板的左右坐标和高度
for(int i = 1; i <= n; i++){
scanf("%d %d %d", &l[i], &r[i], &h[i]);
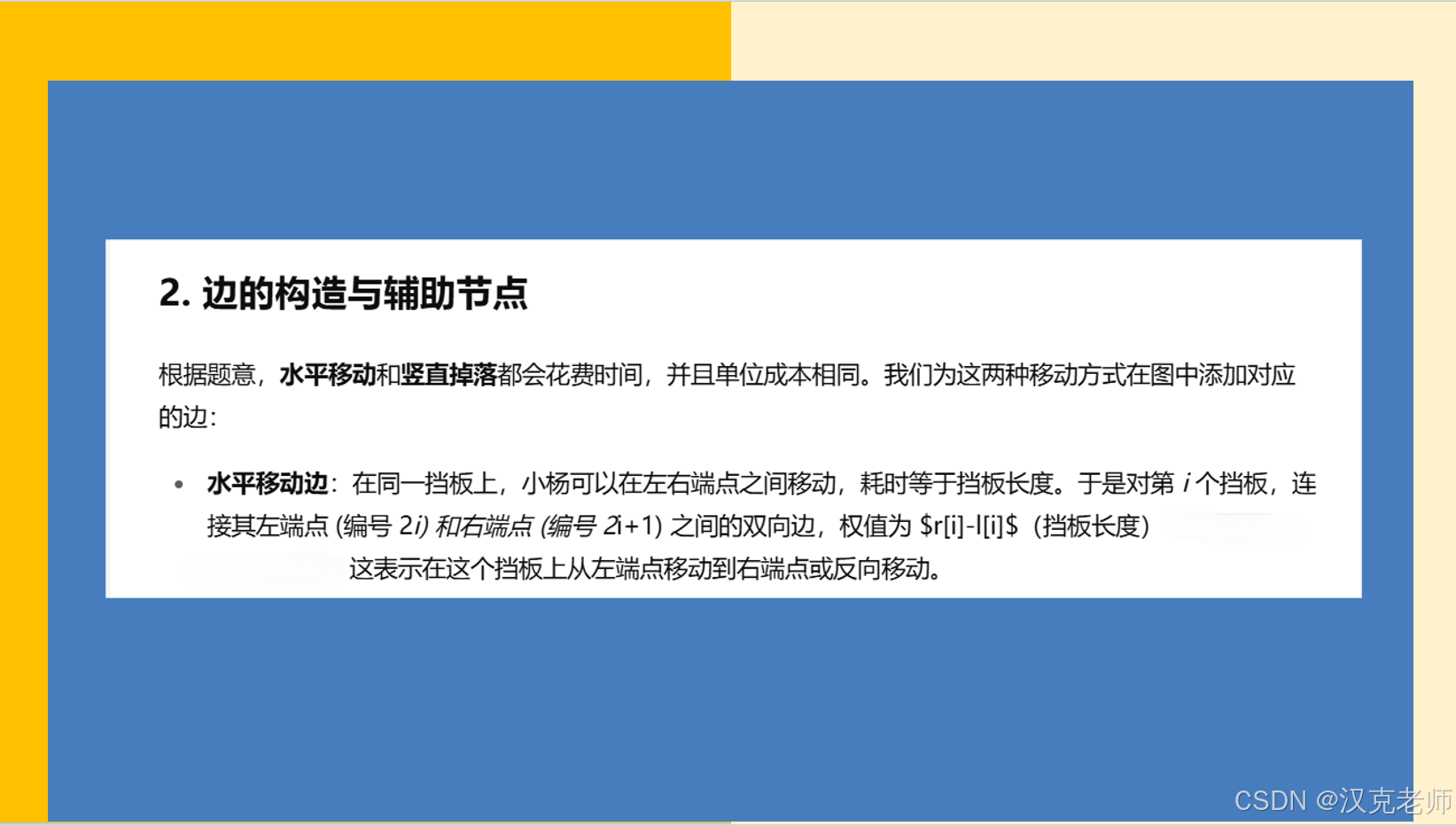
// 添加挡板 i 水平移动的双向边:左端到右端,权值为挡板长度
G[LL(i)].push_back({RR(i), r[i] - l[i]});
G[RR(i)].push_back({LL(i), r[i] - l[i]});
}
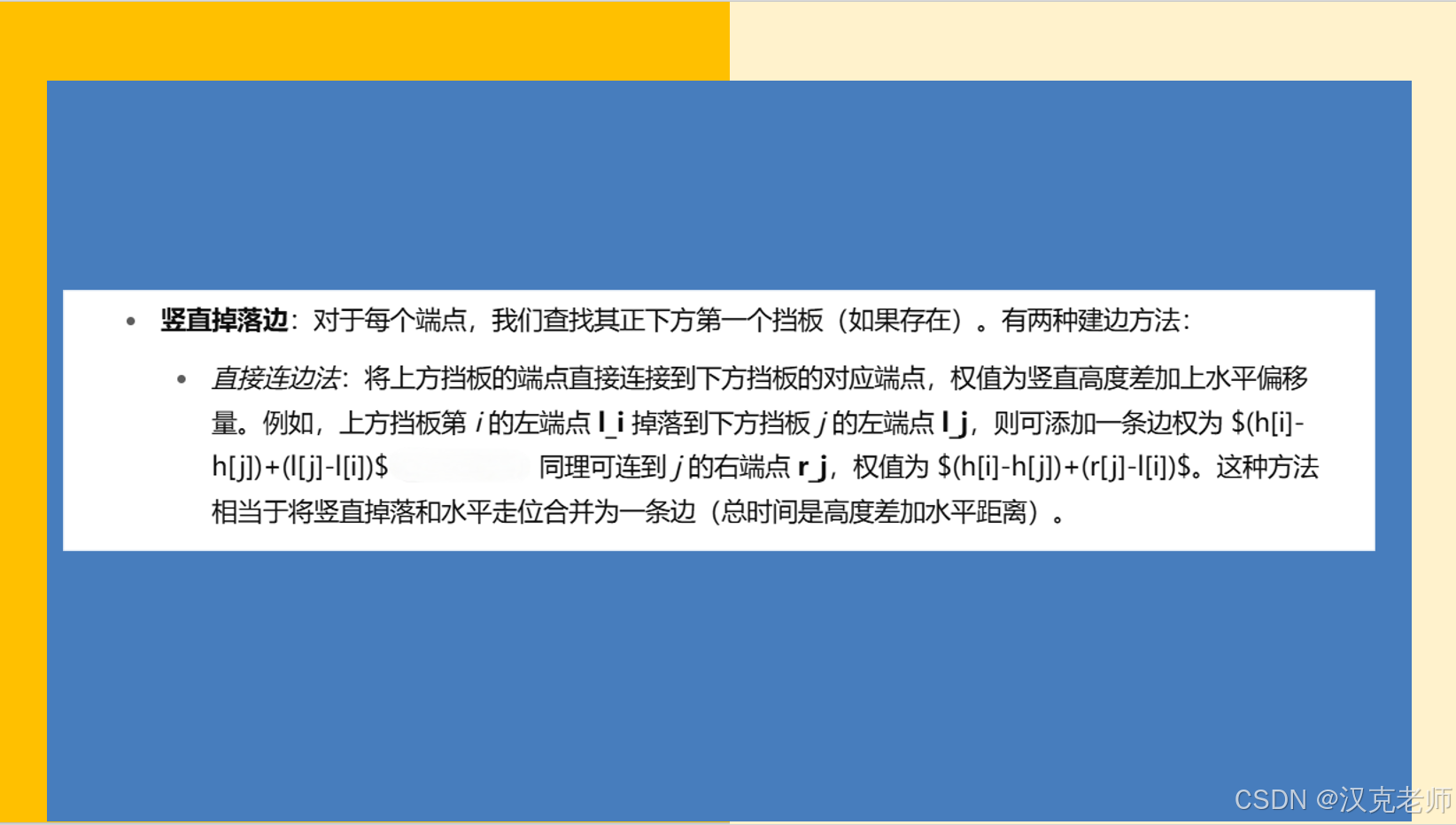
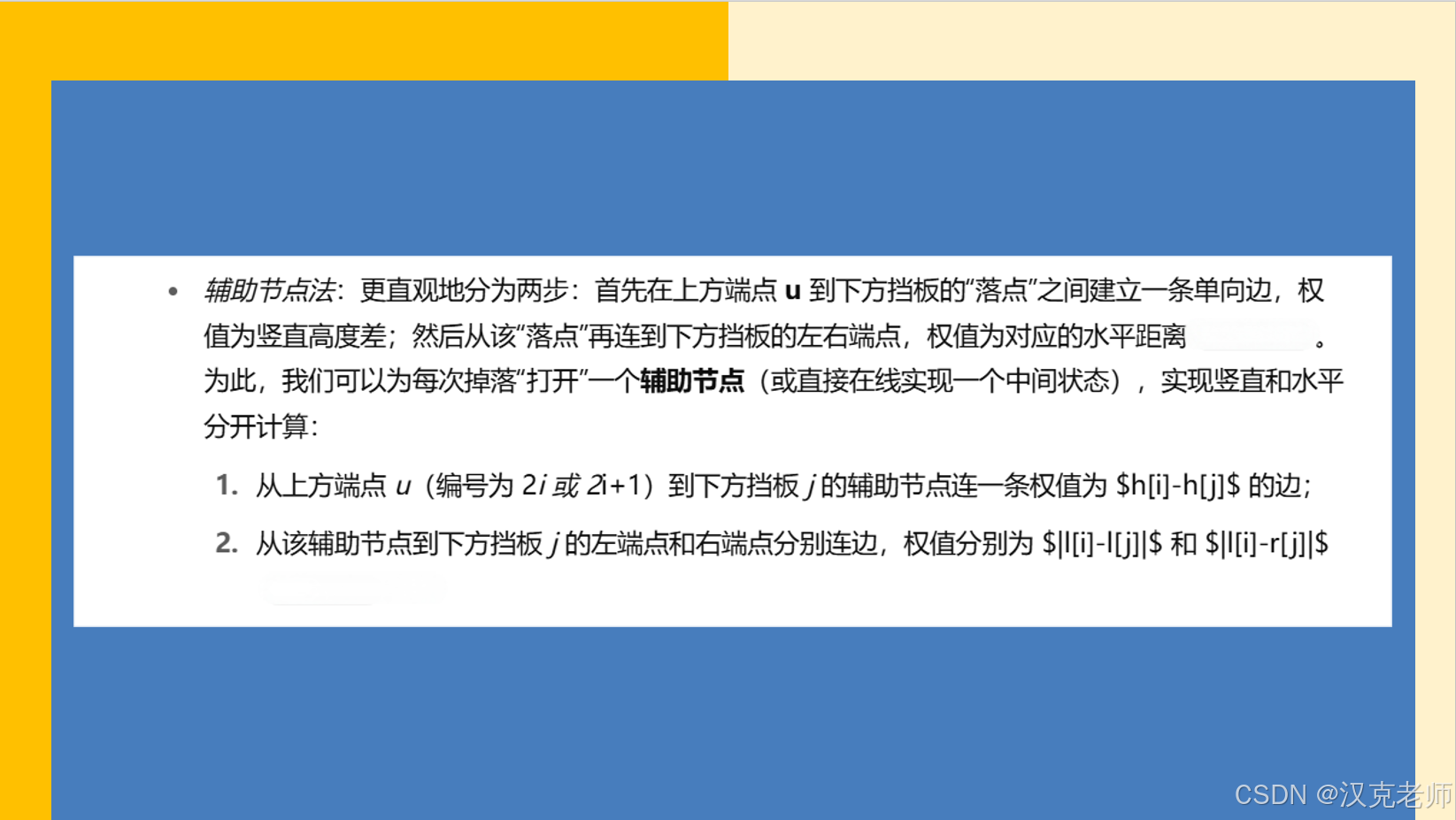
// 以下构造竖直掉落的边,采用辅助节点思路或直接加边思路任选其一
// 这里以直接连边(两条边)为例:
// 对于每个挡板 i 的左端点和右端点,找到其下方第一个挡板 j
// 可以用两重循环暴力检查(效率 O(n^2)),寻找最低高度却高于 i 的挡板
// 或者按照高度排序后逐一处理。此处示意逻辑:
for(int i = 1; i <= n; i++){
// 初始化记录,第一个落点挡板索引
int dropL = 0, dropR = 0;
for(int j = 1; j <= n; j++){
if(h[j] < h[i]) { // 下方的挡板
// 左端点下落:如果挡板 j 横跨了 i 的左端点位置
if(l[i] >= l[j] && l[i] <= r[j]) {
// 取最近的挡板(高度最大的)
if(dropL == 0 || h[j] > h[dropL]) dropL = j;
}
// 右端点下落:如果挡板 j 横跨了 i 的右端点位置
if(r[i] >= l[j] && r[i] <= r[j]) {
if(dropR == 0 || h[j] > h[dropR]) dropR = j;
}
}
}
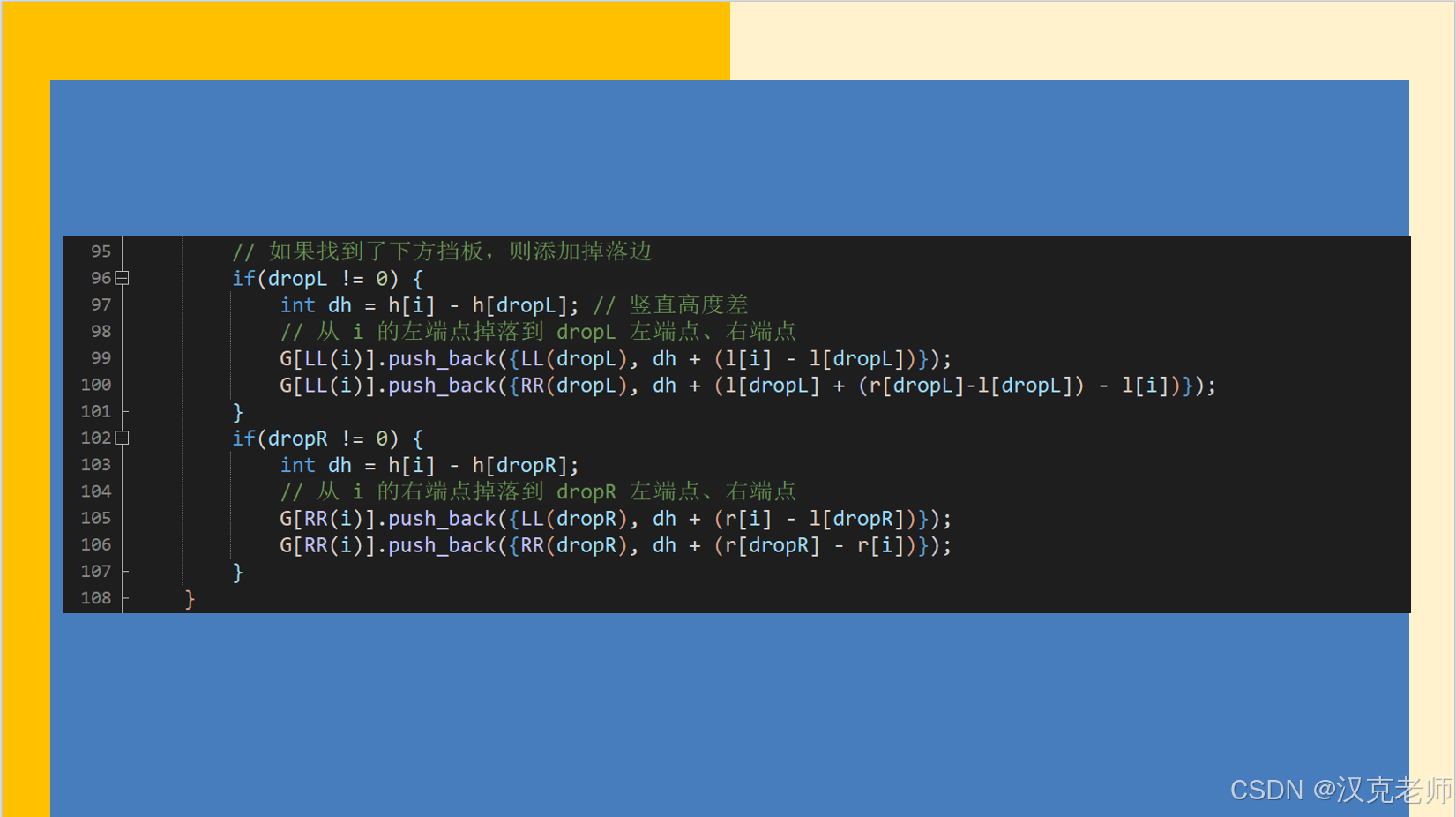
// 如果找到了下方挡板,则添加掉落边
if(dropL != 0) {
int dh = h[i] - h[dropL]; // 竖直高度差
// 从 i 的左端点掉落到 dropL 左端点、右端点
G[LL(i)].push_back({LL(dropL), dh + (l[i] - l[dropL])});
G[LL(i)].push_back({RR(dropL), dh + (l[dropL] + (r[dropL]-l[dropL]) - l[i])});
}
if(dropR != 0) {
int dh = h[i] - h[dropR];
// 从 i 的右端点掉落到 dropR 左端点、右端点
G[RR(i)].push_back({LL(dropR), dh + (r[i] - l[dropR])});
G[RR(i)].push_back({RR(dropR), dh + (r[dropR] - r[i])});
}
}
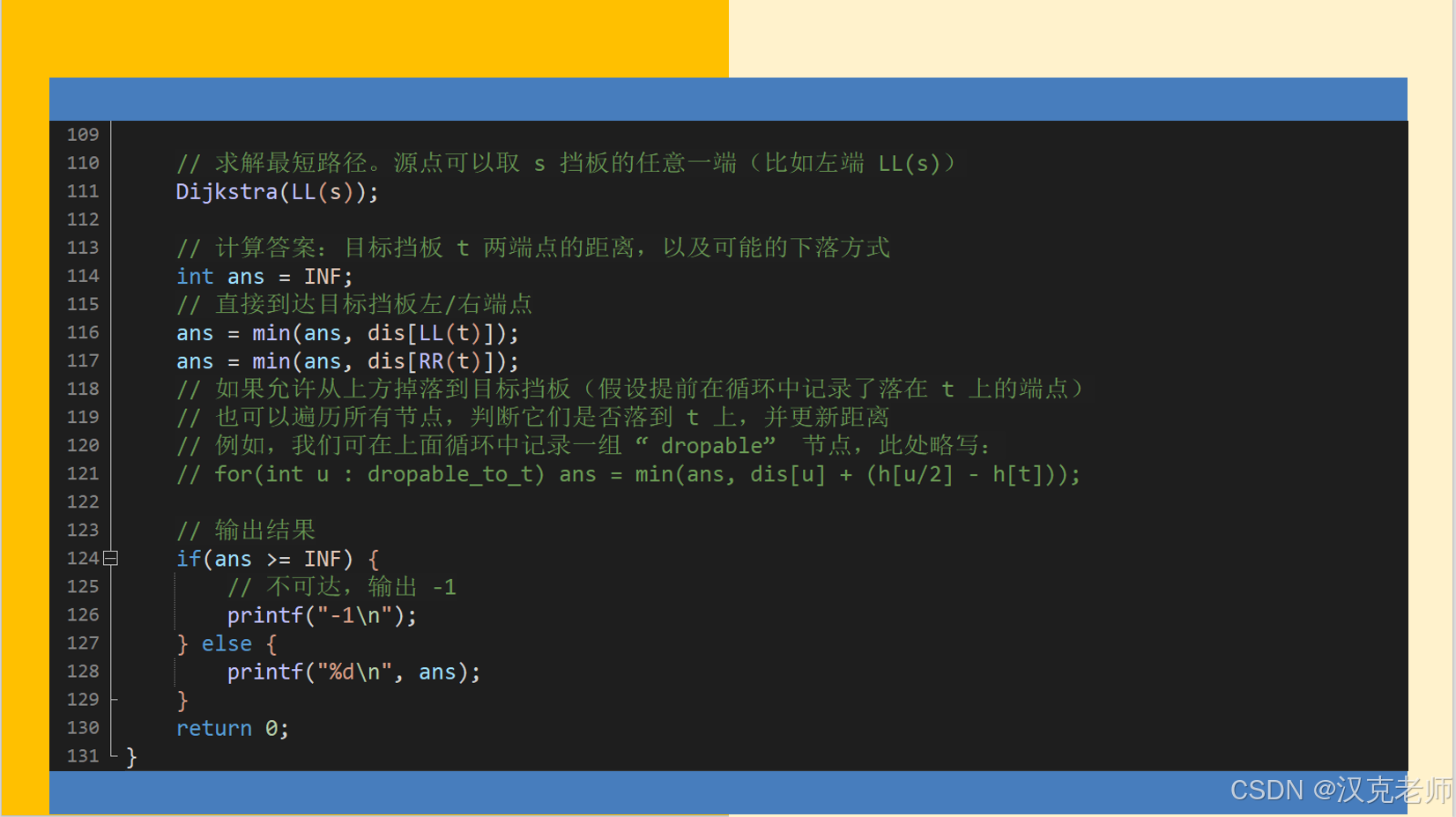
// 求解最短路径。源点可以取 s 挡板的任意一端(比如左端 LL(s))
Dijkstra(LL(s));
// 计算答案:目标挡板 t 两端点的距离,以及可能的下落方式
int ans = INF;
// 直接到达目标挡板左/右端点
ans = min(ans, dis[LL(t)]);
ans = min(ans, dis[RR(t)]);
// 如果允许从上方掉落到目标挡板(假设提前在循环中记录了落在 t 上的端点)
// 也可以遍历所有节点,判断它们是否落到 t 上,并更新距离
// 例如,我们可在上面循环中记录一组 "dropable" 节点,此处略写:
// for(int u : dropable_to_t) ans = min(ans, dis[u] + (h[u/2] - h[t]));
// 输出结果
if(ans >= INF) {
// 不可达,输出 -1
printf("-1\n");
} else {
printf("%d\n", ans);
}
return 0;
}