1ecat总线
不适合新手学习,我复习用的。
can和ecat是一家的,就跟C和C++的关系。
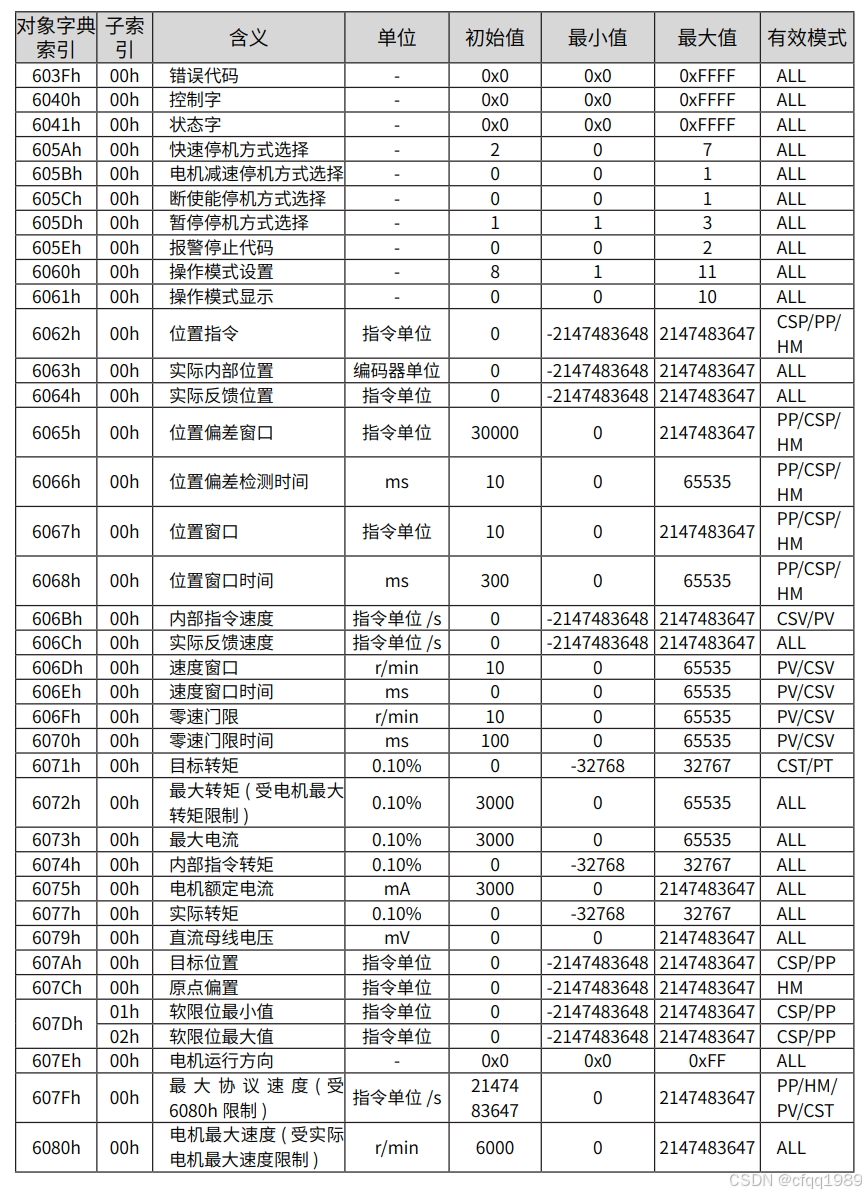
参考CIA402定义
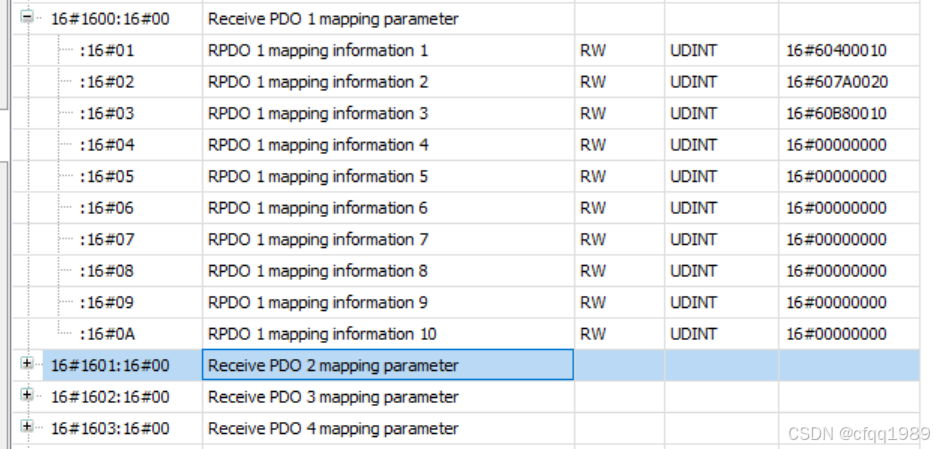
2 PDOr⬇️
主站发送到终端伺服。
有4组,0x1600
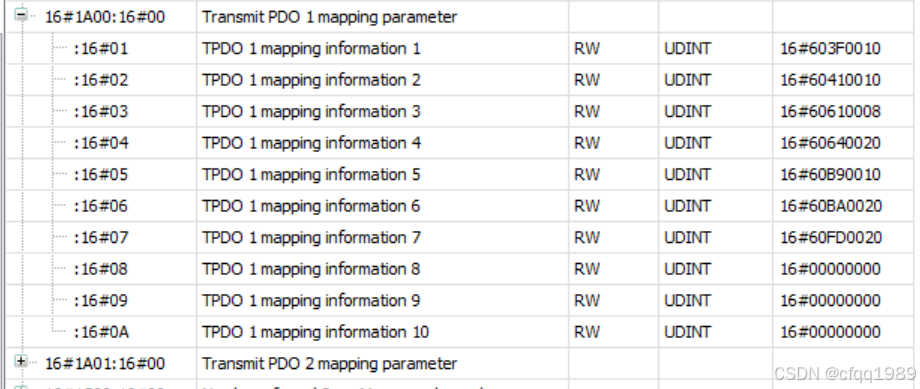
3 PDOt⬆️
伺服驱动器发送到主站。
我记得有4组,但这款伺服只有2组。
4 速度模式
0x6060-00 = 3 速度模式
0x6083-00 = 加速度,最大加速度0x60C5
0x6084-00 = 减速度,最大减速度0x60C6
0x60FF-00 = 巡航速度【目标速度】
0x606D 速度到达区间
0x606E 速度到达确认时间
0x606F 零速到达阀值
0x606B 实际命令速度
0x606C 实际电机速度
0x60B1 速度偏移
5力矩模式
0x6060 = 4 【力矩模式】
0x6087 力矩加速度【扭矩斜率】
0x6071 目标扭矩
0x6072 电机最大扭矩
0x6073 电机最大电流
0x6075 电机额定电流
0x6074 实际命令的扭矩%
0x6077 实际输出扭矩%
0x6078 实际输出电流A【雷赛阉割了】
0x60B2 扭矩偏移
6回零模式
0x6060 = 6 【回零模式】
0x607C= 零点偏置 //
0x6098=1~35 【回零方式】
0x6099-01 回零高速【圈脉冲当量】
0x6099-02 回零低速
0x609A 回零加速度
7定位模式
0x607D-01 负软限位
0x607D-02 正软限位
0x605A-00 急停方式
0x6085-00 急停减速度
0x6060 = 8 【同步位置】一般这个用的最多
0x60C2 同步时间【SYNC】//必须与 SYNC 周期相同。
0x60C2-01 补间单位【1~20ms】
0x60C2-02 补间时间指数 -3 【10的负3次方,表示ms毫秒】
0x607A 设置目标位置【定位坐标】
0x607F 指令速度上限【受实际电机限制,0x6080】
0x6080 电机速度上限
0x6081 设置目标速度【电机ACC巡航定位时的速度】
0x6083 加速度
0x6084 减速度
设置位置确认区间【电机定位精度】
0x6063 实际编码器位置 0x60FC
0x6064 实际电机位置
0x606C 实际电机速度
0x6074 实际命令转矩%
0x6077 实际电机扭矩%
0x6078 实际电机电流【雷赛阉割了】
0x60F4 实际精度误差
0x6065-00 位置误差过大阀值
0x6066-00 位置误差时间阀值
0x608F-01 编码器分辨率【0x20000】
0x608F-02 电机圈数【1】
0x6091-01 电子齿轮分子【1比1】
0x6091-02 电子齿轮分母
0x6092-01 电机脉冲圈当量【10000比1】
0x6092-02 电机圈数
0x60B0 位置偏移
8补充
0x603F 最后一次故障【伺服故障码】
0x605A 急停方式【急停刹车方式】
0x6060 伺服模式1 PP 协议位置模式
3 PV 协议速度模式
4 PT 协议转矩模式
6 HM 原点模式
8 CSP 循环同步位置模式
9 CSV 循环同步速度模式
10 CST 循环同步转矩模式
0x6061 实际伺服模式【当前伺服模式】
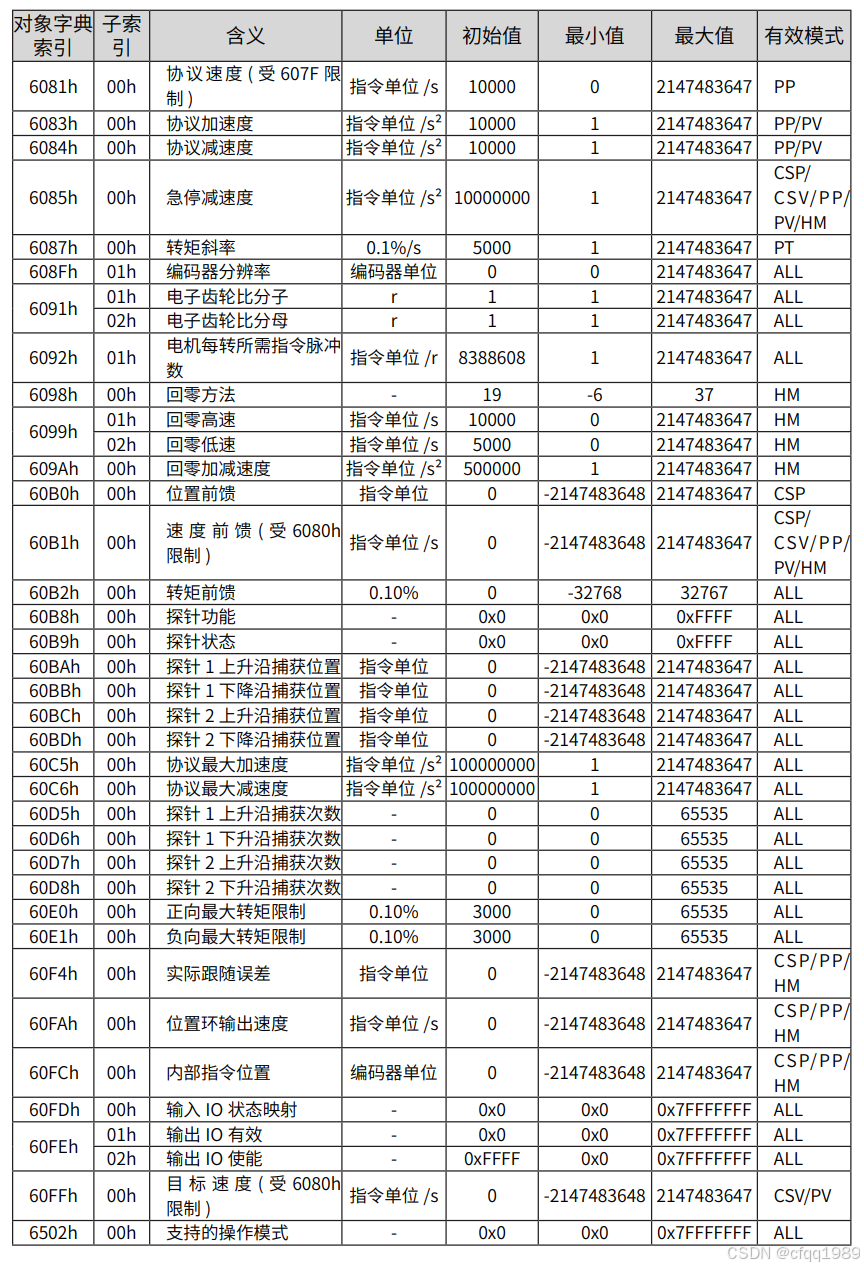
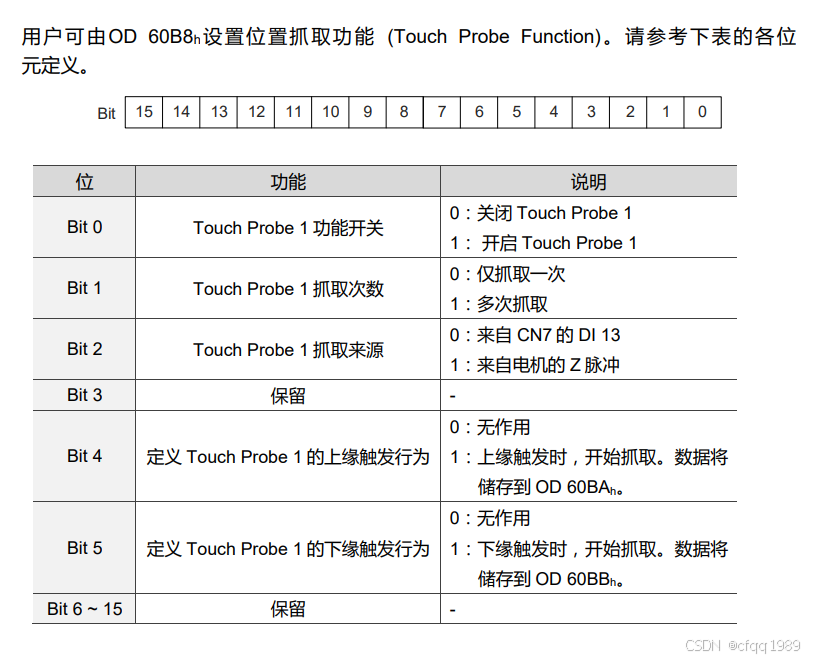
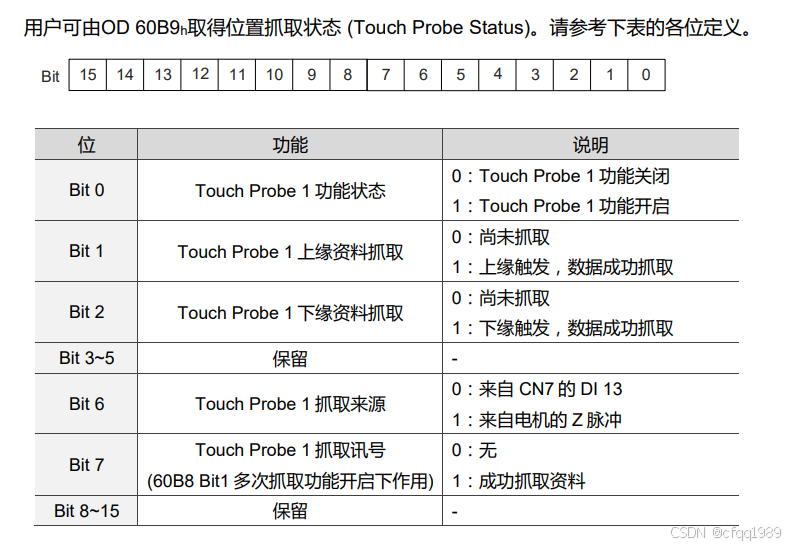
9 探针 60B8h
0x60B8 探针开关 0x33【xx11 x011】
0x60B9 探针状态 【10xx xx11】
0x60BA 1次坐标【上升沿】
0x60BB 1次坐标【下降沿】
0x60BC 2次坐标【上升沿】
0x60BD 2次坐标【下降沿】
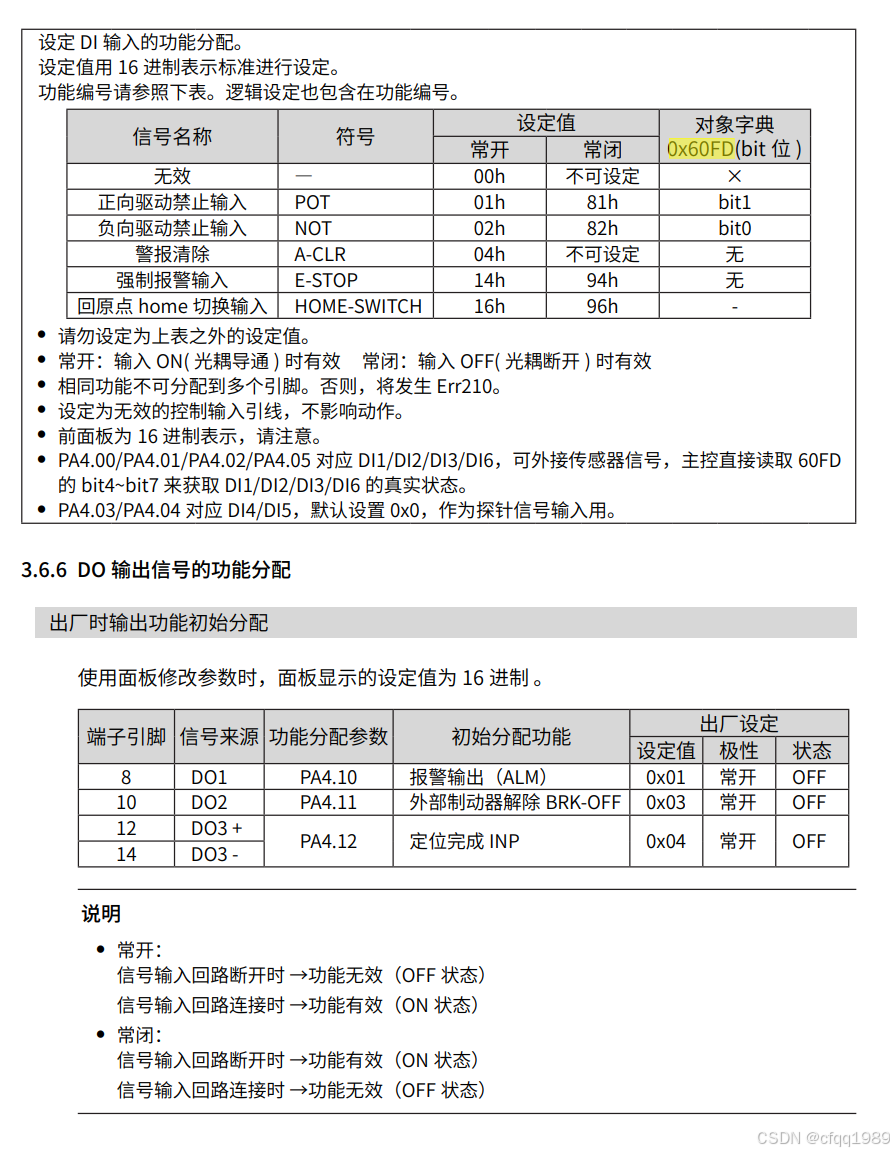
IO定义:
0x60FD-00