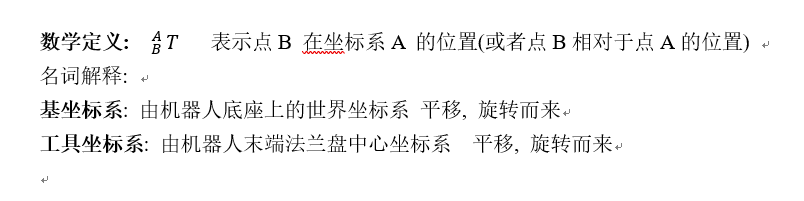
基础知识 :
一, 9点标定之固定相机标定:
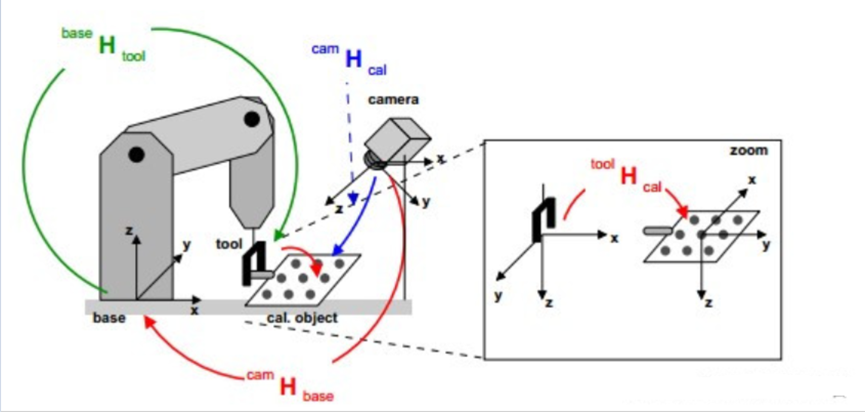
图1: 固定位置相机拍照
因为相机和机器人的基坐标系是固定的, 所以在海康威视相机的9点标定功能栏中, 填上海康使用"圆查找"捕捉到的坐标值, 再将机器人显示的工具坐标系在基坐标系的实时位置pos_act值填入物理坐标X, Y中即可
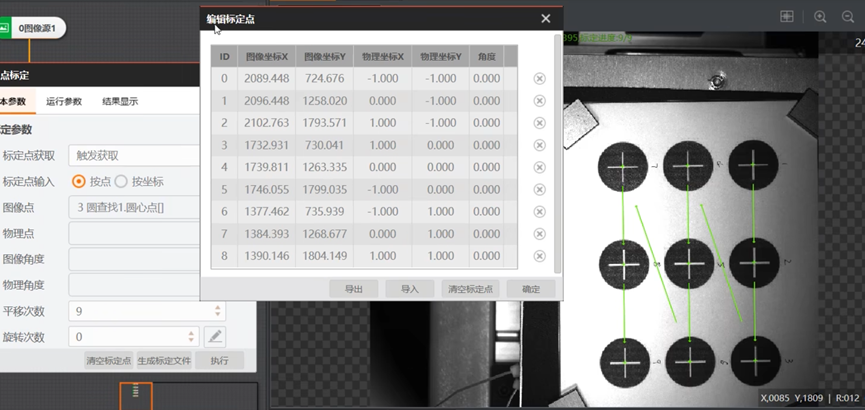
图2: 海康visonMaster 9点标定
二 , 9点标定之移动相机标定:
海康移动相机的选项是无用的, 官方版主回答了以下答案 : 相机运动或者静止,都是针对2D定位引导场景,此时可以理解为坐标系只有X、Y和Rz方向,相机运动只是对相机静止时运动机构物理坐标取反而已。
图3: 海康visonMaster 移动相机的意义
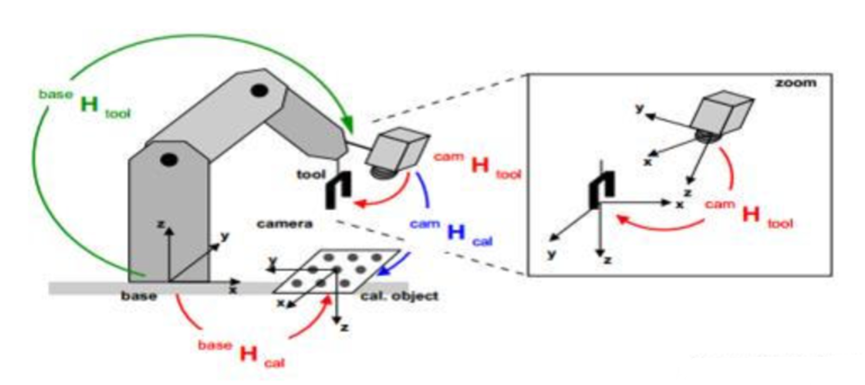
图4: 移动位置相机拍照
相机在机械手上的标定, 因为相机在机械手上是不停移动的, 不同的拍照位置, 对应不同的相机工具坐标系位置, 无法和固定的基坐标系位置标定. 如果强行像固定位置标定那样直接填实时位置, 那么只有在拍照位置和标定位置相同时, 才勉强能用(实际上9点移动了9个坐标,和拍照位置误差很大, 严格意义上也是不可用的), 如果你标定位置和拍照位置不同, 则标定不可用.
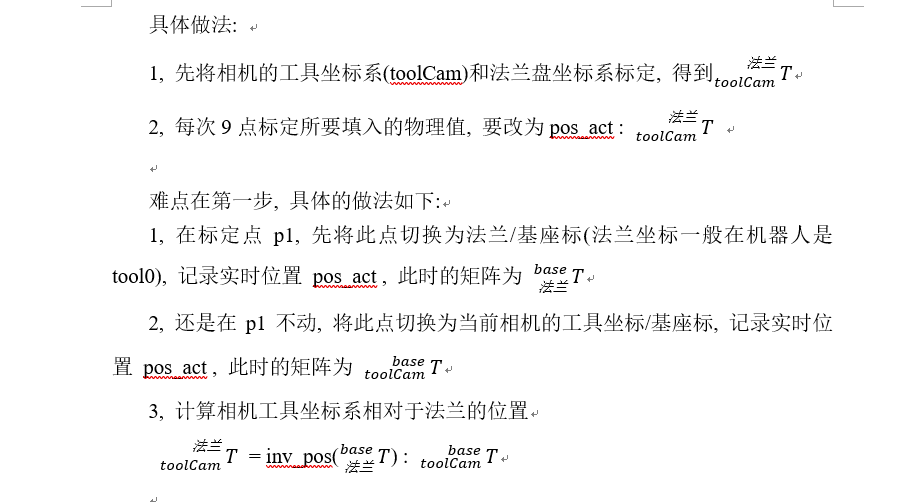
**正确的标定方法**: 因为机械手上相机和法兰盘的相对位置是固定的, 而法兰盘在基座标的位置是实时变化的, 所以先标定分2步:1, 建立相机-法兰盘固定关系
2, 建立法兰盘-基座标的动态关系.
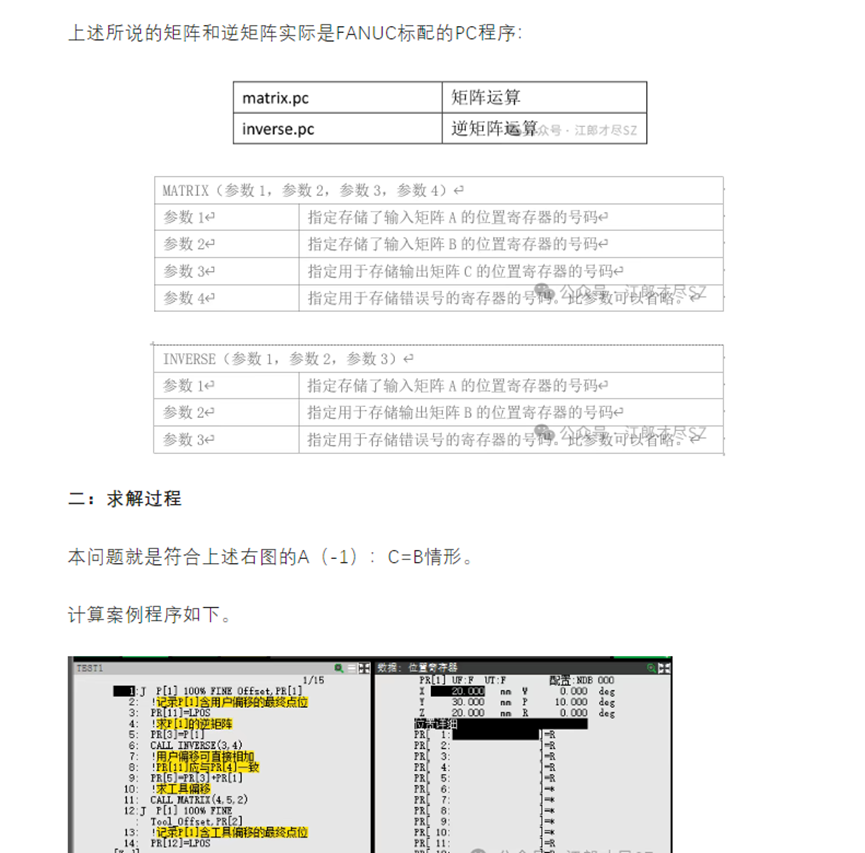
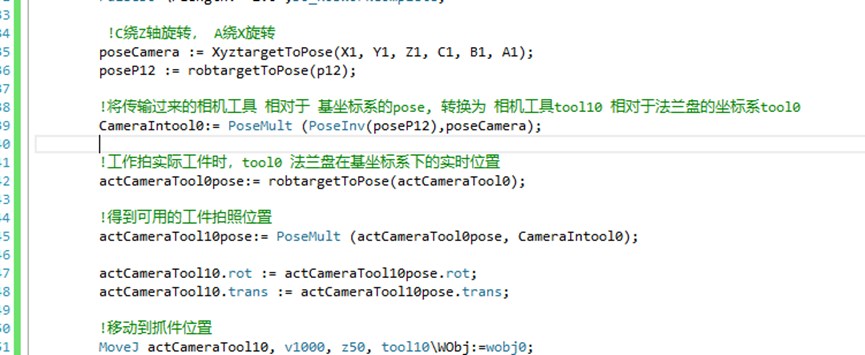
三 , 矩阵运算的顺序
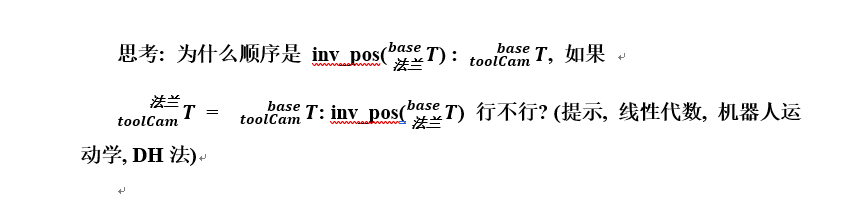
以上为kuka机器人的语法
四, ABB, Fanuc机器人的写法
Abb语法:
Fanuc语法: