《SafeDrive: Knowledge- and Data-Driven Risk-Sensitive Decision-Making for Autonomous Vehicles with Large Language Models》 2024年12月发表,来自USC、U Wisconsin、U Michigan、清华大学和香港大学的论文。
自动驾驶汽车(AV)的最新进展利用大型语言模型(LLM)在正常驾驶场景中表现良好。然而,确保动态、高风险环境中的安全以及管理安全关键的长尾事件仍然是一个重大挑战。为了解决这些问题,我们提出了SafeDrive,这是一个知识和数据驱动的风险敏感决策框架,以提高自动驾驶汽车的安全性和适应性。拟议框架引入了一个模块化系统,包括:(1)风险模块,用于全面量化涉及驾驶员、车辆和道路相互作用的多因素耦合风险;(2) 存储模块,用于存储和检索典型场景以提高适应性;(3)基于LLM的推理模块,用于情境感知安全决策;以及(4)反射模块,用于通过迭代学习来细化决策。通过将知识驱动的见解与自适应学习机制相结合,该框架确保了在不确定条件下做出稳健的决策。对以动态和高风险场景为特征的现实世界交通数据集进行广泛评估,包括高速公路(HighD)、十字路口(InD)和环形交叉口(RounD),验证了该框架提高决策安全性(实现100%的安全率)、复制类人驾驶行为(决策一致性超过85%)以及有效适应不可预测场景的能力。SafeDrive的拟议框架为整合知识和数据驱动方法建立了一个新的范式,突出了在长尾或高风险交通场景中提高自动驾驶安全性和适应性的巨大潜力。
1. 研究背景与问题
自动驾驶车辆(AVs)在常规场景中表现优异,但在动态高风险环境 (如复杂城市交通)和长尾事件(罕见但高风险的极端场景)中仍面临安全挑战。现有数据驱动方法存在以下问题:
-
数据偏差:过度依赖常见场景,忽略罕见长尾事件。
-
缺乏可解释性:黑箱模型难以追溯决策逻辑,安全难以保障。
-
LLM的局限性:大语言模型(LLM)虽具备类人推理能力,但可能因过度自信引发危险行为。
核心研究问题:
-
RQ1:如何有效建模和量化安全关键环境中的多因素耦合风险?
-
RQ2:如何引导LLM代理生成安全且类人的驾驶行为?
2. 方法论与框架设计
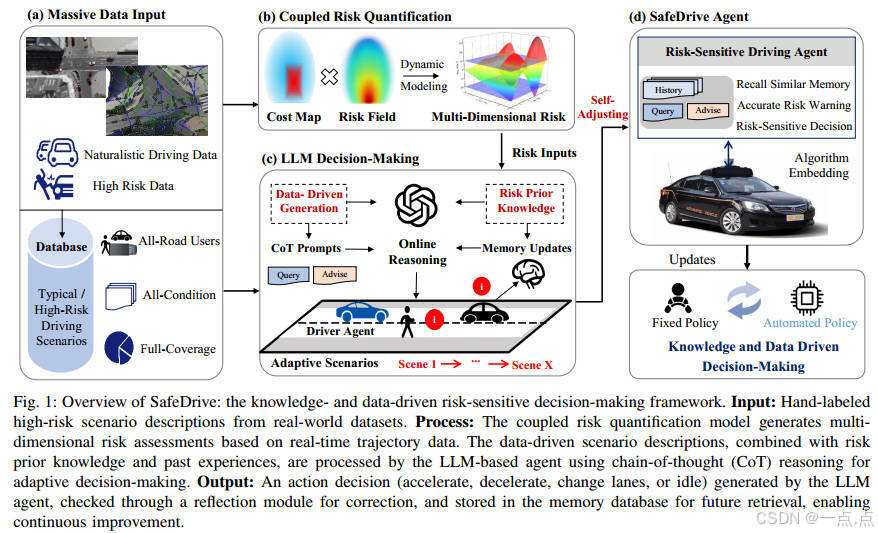
作者提出SafeDrive框架,整合知识驱动(专家规则)与数据驱动(实时学习),包含四大模块:
(1)风险模块(Risk Module)
-
动态Driver Risk Field(DRF)模型:
-
扩展传统DRF,引入车速和转向动态参数(如转向角δ),通过高斯环模型预测车辆路径风险分布。
-
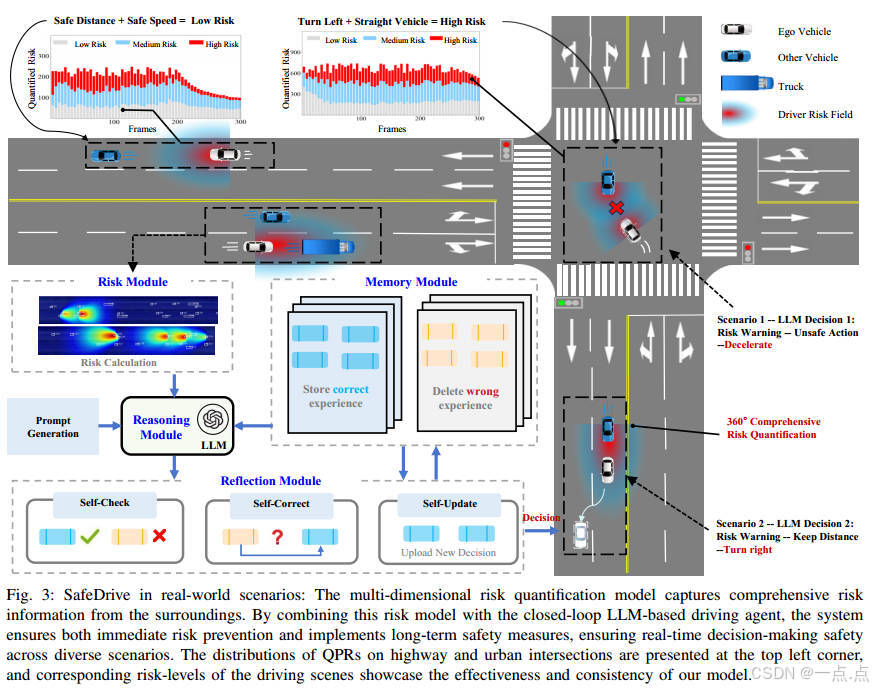
全向风险量化:不仅计算前方车辆风险(QPRfront),还纳入后方车辆影响(QPRrear),形成360度风险场(QPRtotal)。参数动态调整(如σ随转向角变化),模拟人类驾驶员对风险的感知。
-
(2)记忆模块(Memory Module)
-
基于向量数据库存储历史场景的嵌入向量(GPT生成),通过相似性检索支持少样本学习。
-
动态更新机制:将新场景的决策与反思结果存入数据库,实现持续优化。
(3)推理模块(Reasoning Module)
-
LLM(GPT-4)驱动:结合场景描述、风险量化结果和记忆模块的案例,生成驾驶决策(加速、减速、变道等)。
-
链式推理(CoT):通过结构化提示(如系统消息、风险阈值)引导LLM进行安全优先的推理。
(4)反思模块(Reflection Module)
-
闭环反馈机制:评估决策与真实标签的偏差,生成反思日志(如"为何选择错误动作"),修正后存入记忆模块。
-
支持开发者分析决策逻辑,优化系统提示词。
3. 实验与结果
数据集与场景
-
HighD (高速公路)、InD (城市交叉口)、RoundD(环形交叉口),覆盖高动态、高冲突场景。
-
数据量:总计超25,000条轨迹(如InD含11,500条交叉口轨迹)。
风险量化验证
-
QPR与经典指标对比(如THW、TTC):
-
QPR在纵向风险(THW <2秒)和横向风险(侧向距离)上均与人类驾驶逻辑一致。
-
分类阈值:低风险(<30%分位)、中风险(30%~70%)、高风险(>70%)。
-
决策性能
-
安全率(无碰撞/干扰行为):
- 100%安全率 (HighD、RoundD)和95.46%(InD),显著优于IDM(76%~92.5%)和纯GPT-4(69%~77%)。
-
决策对齐率(与人类驾驶行为一致):
- 最高达86.36%(InD),依赖风险模块与记忆模块的协同。
-
案例对比(图10):
- 无风险模块时,LLM因过度自信选择危险变道;加入风险模块后,识别高风险车辆(如Vehicle 6)并保持当前车道。
4. 贡献与创新
-
统一风险量化模型:
- 全向动态DRF,支持多因素耦合风险(人-车-路)的实时评估。
-
LLM与风险驱动的决策框架:
- 结合知识驱动(风险规则)与数据驱动(实时学习),提升安全性与可解释性。
-
实验验证:
- 在真实复杂场景中实现100%安全率与高人类对齐率,填补了LLM在动态高冲突环境中的研究空白。
5. 局限与未来方向
-
当前局限:
-
环境特征未完全建模(如道路边界、障碍物)。
-
依赖GPT-4,推理效率较低(响应时间约20秒/场景)。
-
-
未来优化:
-
融合更多环境参数(如天气、路面条件)。
-
采用轻量化LLM(如ChatGPT o1-preview)提升实时性。
-
领域微调(如交通规则知识增强)。
-
6. 总结
SafeDrive 通过整合动态风险量化与LLM推理能力,在复杂交通场景中实现了安全且类人的驾驶决策。其模块化设计和闭环学习机制为自动驾驶系统的安全增强 与持续优化提供了新范式,尤其在长尾事件和高风险场景中展现出显著优势。未来结合更高效LLM与环境感知技术,有望进一步推动自动驾驶向更高自动化级别发展。
如果此文章对您有所帮助,那就请点个赞吧,收藏+关注 那就更棒啦,十分感谢!!!