【题目】:ViT-CoMer: Vision Transformer with Convolutional Multi-scale Feature Interaction for Dense Predictions
【引用格式】:Xia C, Wang X, Lv F, et al. Vit-comer: Vision transformer with convolutional multi-scale feature interaction for dense predictionsC//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2024: 5493-5502.
【开源代码】:https: //github.com/Traffic-X/ViT-CoMer
目录
[1. 总体架构](#1. 总体架构)
[2. 多感受野特征金字塔](#2. 多感受野特征金字塔)
[3. CNN与Transformer双向融合交互](#3. CNN与Transformer双向融合交互)
[1. 目标检测和实例分割](#1. 目标检测和实例分割)
[1.1 实验设置](#1.1 实验设置)
[1.2 与不同骨干网络和框架的比较](#1.2 与不同骨干网络和框架的比较)
[1.3 不同预训练权重下的结果](#1.3 不同预训练权重下的结果)
[1.4 与最先进方法的比较](#1.4 与最先进方法的比较)
[2. 语义分割](#2. 语义分割)
[2.1 实验设置](#2.1 实验设置)
[2.2 与不同骨干网络比较](#2.2 与不同骨干网络比较)
[2.3 与不同预训练权重的比较](#2.3 与不同预训练权重的比较)
[2.4 与最先进方法比较](#2.4 与最先进方法比较)
[3. 消融实验](#3. 消融实验)
[3.1 实验设置](#3.1 实验设置)
[3.2 组件消融实验](#3.2 组件消融实验)
[3.3 双向融合交互的数量](#3.3 双向融合交互的数量)
[3.4 MRFP中不同卷积核大小](#3.4 MRFP中不同卷积核大小)
[3.5 可扩展性](#3.5 可扩展性)
[3.6 定性结果](#3.6 定性结果)
一、瓶颈问题
- ViT 结构自身缺陷: ViT 存在 Patch 内信息交互不足 以及缺乏分层特征 的问题,导致其在捕捉图像多尺度信息、长距离依赖关系和语义表示能力上存在局限性,难以有效处理密集预测任务。
- 跨架构特征融合难题: CNN 和 Transformer 架构由于设计原理不同,在特征表示上存在显著差异(如高低频语义、全局 - 局部信息等方面的偏差),使得两者特征难以有效融合,无法充分发挥各自优势。
- 传统 Transformer 特征利用不充分: 传统 Transformer 架构仅在单一尺度特征上使用自注意力机制,无法充分利用图像中丰富的多尺度信息,限制了模型在密集预测任务中的性能表现。
- **模型泛化与性能提升瓶颈:**在密集预测任务(如目标检测、实例分割和语义分割)中,现有基于 ViT 的方法或特定视觉骨干网络,在模型性能、泛化能力以及对不同预训练策略的适应性方面存在提升瓶颈,难以在各类任务和数据集上取得更优表现 。
二、本文贡献
- 创新跨架构融合机制: 提出新的融合策略,通过自注意力机制 统一 CNN 与 Transformer 特征,增强特征对模态差异的不变性,并利用双向交互更新 ViT 和 CNN 分支特征,有效解决了不同架构特征融合的难题,提升了模型对多尺度、多层次信息的利用能力。
- **优化多尺度特征处理:**改进传统 Transformer 单一尺度特征处理的局限,促使模型更好地捕捉图像多尺度信息,增强了模型在密集预测任务中的特征表达能力。
- **良好的可扩展性与适应性:**方法可轻松集成到其他先进模型,在不同模型规模、算法框架和配置下均表现出色;对不同预训练权重具有良好适应性,能利用多样化的开源大规模预训练提升下游任务性能;应用于分层视觉 Transformer(如 Swin)时也能有效提升模型性能,证明了方法的可扩展性。
三、解决方案
1. 总体架构
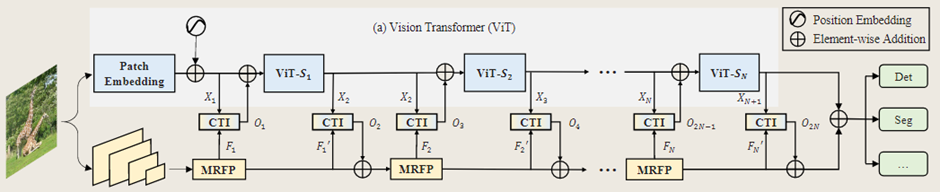
分支特征提取:
ViT-CoMer架构包含两个分支。对于ViT分支,将形状为(H×W×3)的输入图像送入补丁嵌入(patch embedding),得到分辨率为原始图像( 1 / 16 )的特征。对于另一分支,图像通过一组卷积操作,获得分辨率分别为( 1 / 8 )、( 1 / 16 ) 和( 1 / 32 )的特征金字塔C3、C4和C5,每个特征金字塔都包含D维特征图。
特征交互:
两个分支的特征都要经过N个阶段的特征交互。在每个阶段,特征金字塔首先通过 MRFP 模块进行增强 ,然后通过CTI 模块与 ViT 的特征进行双向交互 ,以获得具有丰富语义信息的多尺度特征。CTI 在每个阶段的开始和结束时进行操作。经过N个阶段的特征交互后,将两个分支在每个尺度上的特征相加,用于密集预测任务。
2. 多感受野特征金字塔
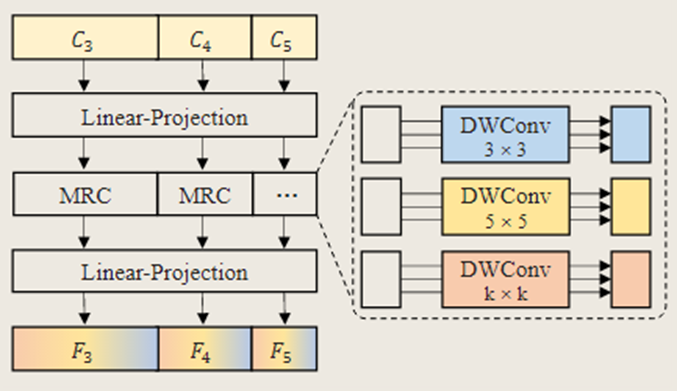
多感受野特征金字塔模块由一个特征金字塔 和多感受野卷积层 组成。【特征金字塔可以提供丰富的多尺度信息 ,适应图像中不同大小目标和结构的表征需求。而多感受野卷积层则通过不同的卷积核来扩大感受野,增强了卷积神经网络(CNN)特征的长距离建模能力】。
多感受野特征金字塔由两个线性投影层 和一组具有多感受野的深度可分离卷积层 组成。该模块的输入是一组多尺度特征{C3,C4,C5},文中将这些特征展平并连接成特征。C首先通过一个线性投影层来获得降维后的特征 ,然后在通道维度上把这些特征划分为M组;不同组的特征对应具有不同感受野的卷积层(例如卷积核大小k=3x3、5x5)。最后,经过处理的特征被连接起来,通过线性投影层进行升维。这个过程可表示为:
F = FC(DWConv(FC(C)))
- **FC:**线性投影
- **DWConv:**具有不同大小卷积核的深度可分离卷积
3. CNN与Transformer双向融合交互
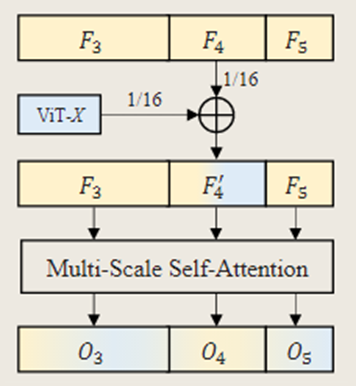
文中提出了一种名为CTI的跨架构特征融合方法,它在不改变 ViT 结构的情况下引入了 CNN 的多尺度特征。同时,通过双向交互,缓解了 ViT 中存在的 Patch 内信息交互不足和非分层特征 的问题,同时进一步增强了 CNN 的长距离建模能力和语义表示能力。
文中为了融合ViT特征和通过MRFP模块获得的多尺度特征{F3,F4,F5}(可表示为
),文中直接将特征 X 和 F4 相加,得到集合 F',表示为F' = { F 3 , F 4 ' , F 5 } ,其聚合了来自不同尺度的特征。之后,由于架构差异,它们在台表示上存在偏差(高低频语义以及全局 - 局部信息),文中增加自注意力机制来统一CNN和Transformer的特征【由于F'包含了不同尺寸的信息,通过自注意力机制可以有效解决传统Transformer在单一尺寸上使用自注意力机制的问题】,增强对模态差异的表示不变性,可描述为:
O=FFN(Attention(norm(F')))
- Norm(-) : 层归一化(LayerNorm)
- Attention() *:*多尺度可变形注意力机制
- FFN() *:*前馈神经网络
最后,通过双线性差值将O3 和O5 的特征图尺寸调整为与O4一致,并将X作为下一个ViT层的输入。
对于跨架构融合的特征,文中采用双向交互来更新ViT和CNN分支的特征。具体来说,在第i阶段开始时,将两个分支的特征进行融合,然后将融合后的特征注入到ViT分支中,可表示为:
:ViT分支更新后的特征
- α:一个初始化为零的可学习变量,能够在早期训练中最小化随机初始化的CNN架构对ViT的影响
在第 i 阶段结束时,重复该过程将特征注入到CNN分支,可表示为:
- i:根据ViT的深度来确定
跨架构的特征融合和双向交互使得能够利用多尺度和多层次的特征,提升了模型的表达能力和泛化能力。同时,所提出的组件能够轻松集成到其他先进的模型中,并在密集预测任务中表现得更好。
四、实验结果
1. 目标检测和实例分割
1.1 实验设置
文中利用MMDetection框架来实现文中方案,并在COCO数据集上进行目标检测和实例分割实验。目标检测和实例分割框架包括掩码区域卷积神经网络(Mask R-CNN)、级联掩码区域卷积神经网络(Cascade Mask R-CNN)、自适应训练样本选择算法(ATSS)和 Generalized Focal Loss(GFL)。参考金字塔Vision Transformer(PVT),文中按照 1 倍(12 个训练轮次)或 3 倍(36 个训练轮次)的训练计划进行实验。文中的总批量大小为 16,使用 AdamW 优化器,学习率为1 × 10⁻⁴ ,权重衰减为 0.05。
1.2 与不同骨干网络和框架的比较
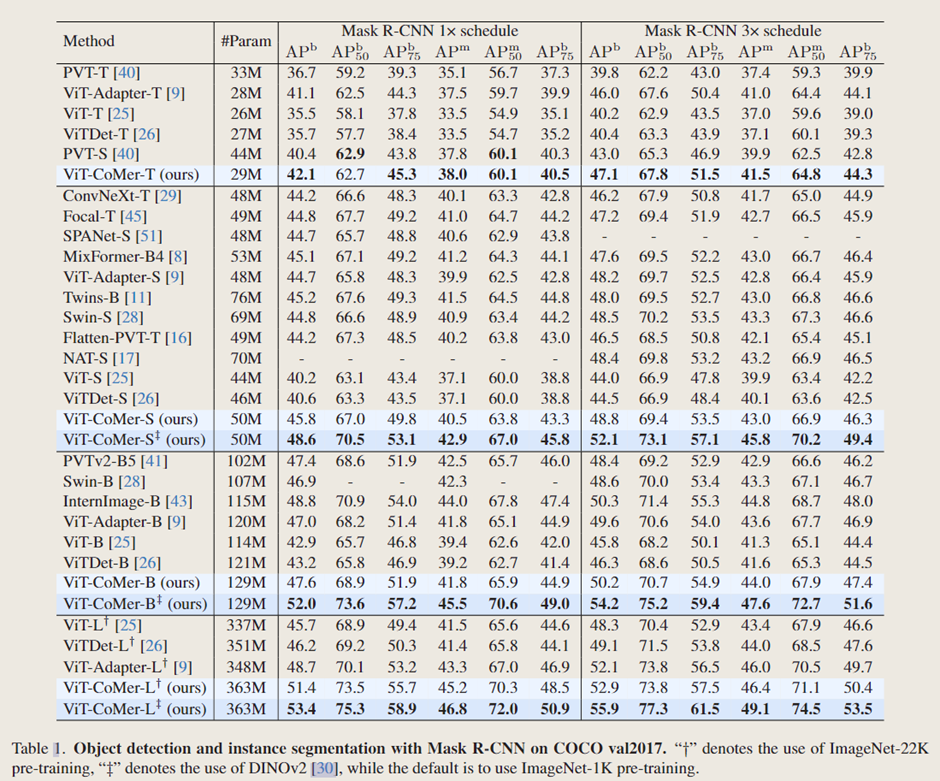
在模型规模相近的情况下,ViT-CoMer 在 COCO 目标检测和实例分割这两项典型的密集预测任务中,性能优于其他骨干网络。例如,在 1 倍(3 倍)训练计划下,ViT-CoMer-S 相比于普通 ViT-S,边界框平均精度均值(box mAP)显著提升了 + 5.6%(+4.8%),掩码平均精度均值(mask mAP)提升了 + 3.4%(+3.1%)。此外,ViT-CoMer-S 在仅使用 ViT-L 六分之一参数的情况下,检测结果优于 ViT-L。而且,文中的方法相较于特定视觉骨干网络以及适配骨干网络,如 InternImage 和 ViT-Adapter ,也展现出了显著的性能提升。
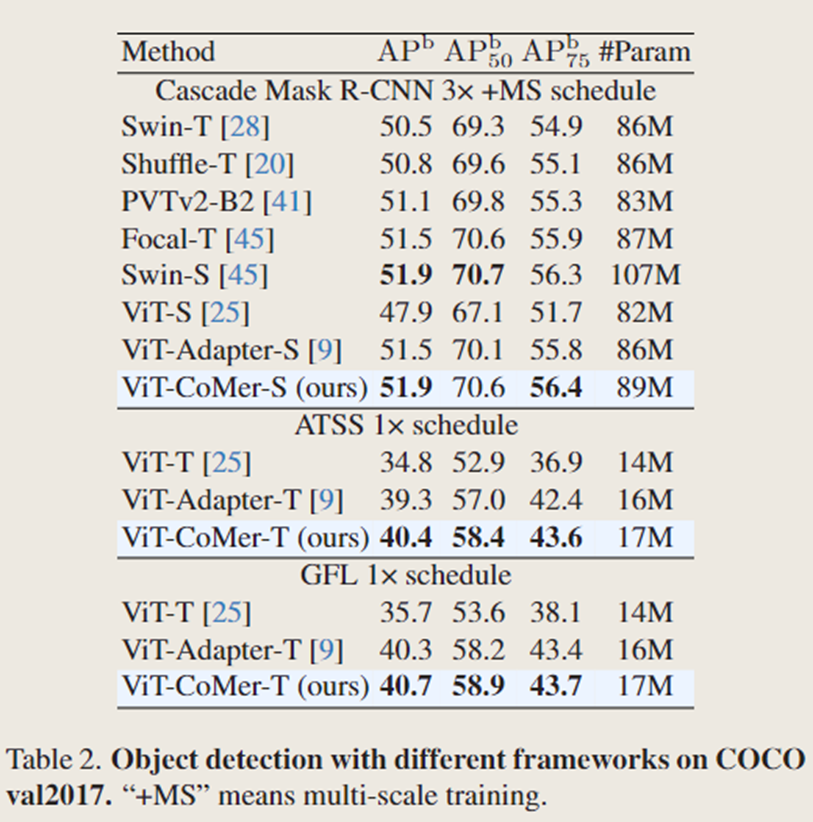
使用不同的检测框架对 ViT-CoMer 进行评估,在各种框架、模型规模和配置下,文中的方法始终优于其他骨干网络。
1.3 不同预训练权重下的结果
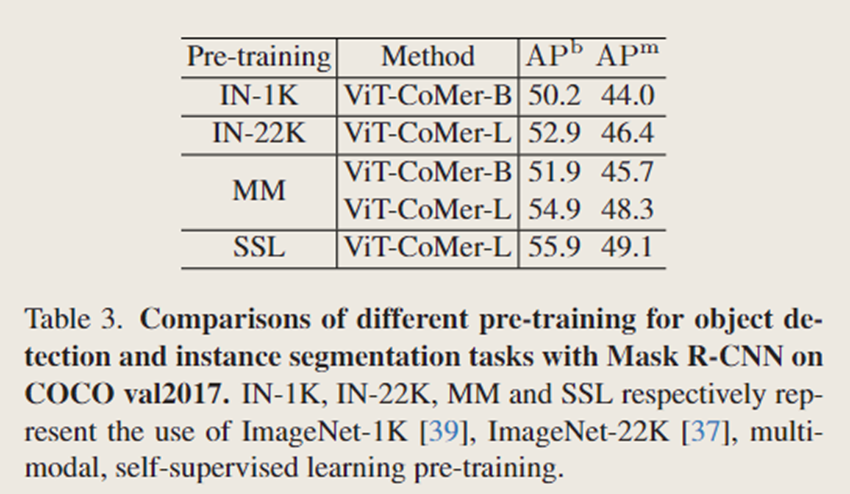
经过多模态预训练的 ViT-CoMer-B 与在 ImageNet-1K 上预训练的模型相比,在边界框平均精度(APb)上提升了(+1.7%),在掩码平均精度(APm)上提升了(+1.7%) 。此外,文中在 ViT-CoMer-L 上比较了更多的预训练方式,其中自监督预训练取得了显著的成果。与在 ImageNet-22K上预训练的模型相比,它在边界框平均精度(APb)上提升了(+3.0%),在掩码平均精度(APm)上提升了(+2.7%) 。
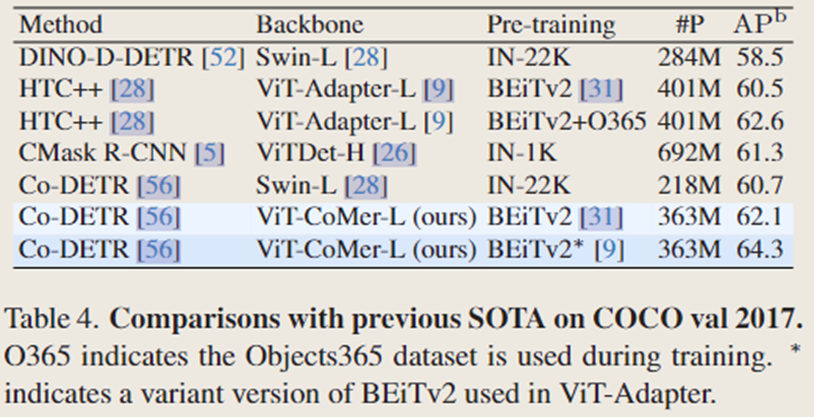
1.4 与最先进方法的比较
2. 语义分割
2.1 实验设置
语义分割实验基于使用了 MMSegmentation 的 ADE20K 数据集。文中选择 UperNet 作为基础框架。训练配置与 Swin 保持一致,包括进行 160,000 次迭代训练。批量大小设置为 16,使用 AdamW 优化器。学习率和权重衰减参数分别调整为(2 × 10⁻⁵) 和 0.05。
2.2 与不同骨干网络比较
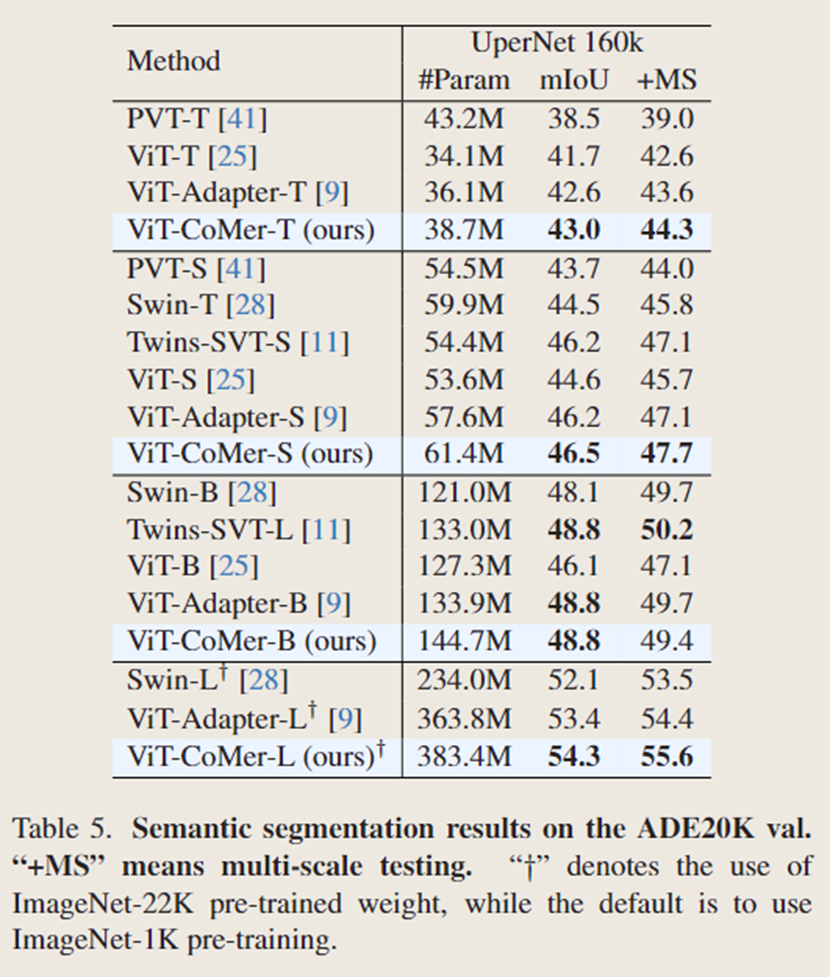
ViT-CoMer-S 在多尺度平均交并比(MS mIoU)上达到了 47.7%,超过了许多强大的同类方法,比如 Swin-T(高出 1.9%)和 ViTAdapter-S(高出 0.6%)。同样,ViT-CoMer-L 取得了具有竞争力的多尺度平均交并比(MS mIoU)成绩,达到了 55.6%,比 Swin-L 高出 2.1%,比 ViT-Adapter-L 高出 1.2%。
2.3 与不同预训练权重的比较
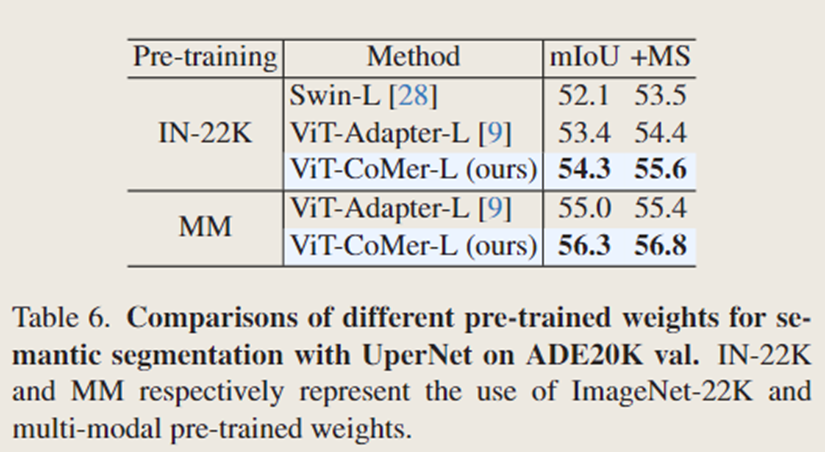
当使用 ImageNet-22K 预训练权重时,文中的 ViT-CoMer-L 在多尺度平均交并比(MS mIoU)上达到 55.6%,比 ViT-Adapter-L 的平均交并比(mIoU)高出 1.2%。然后,文中使用多模态预训练来初始化 ViT-CoMer-L,这使文中的模型在平均交并比(mIoU)上显著提升了 2.0%,比 ViT-Adapter-L 高出 1.4%。
2.4 与最先进方法比较
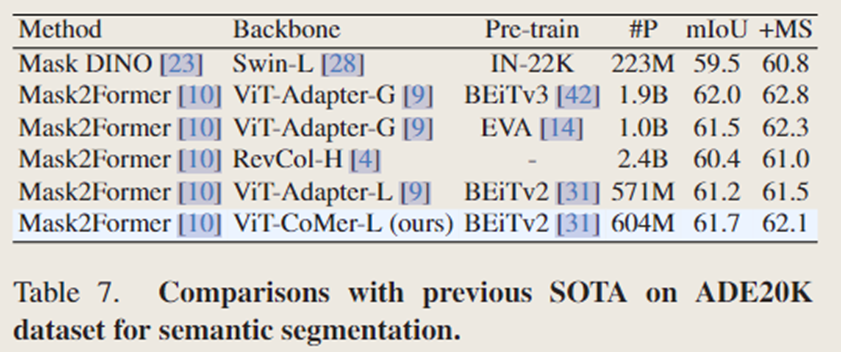
3. 消融实验
3.1 实验设置
文中对 ViT-CoMer-S 进行消融实验,使用掩码区域卷积神经网络(Mask R-CNN)(1 倍训练计划)来执行目标检测和实例分割任务。在训练过程中使用的总批量大小为 16,所采用的优化器是 AdamW,学习率和权重衰减参数分别设置为1 × 10⁻⁴ 和 0.05。
3.2 组件消融实验
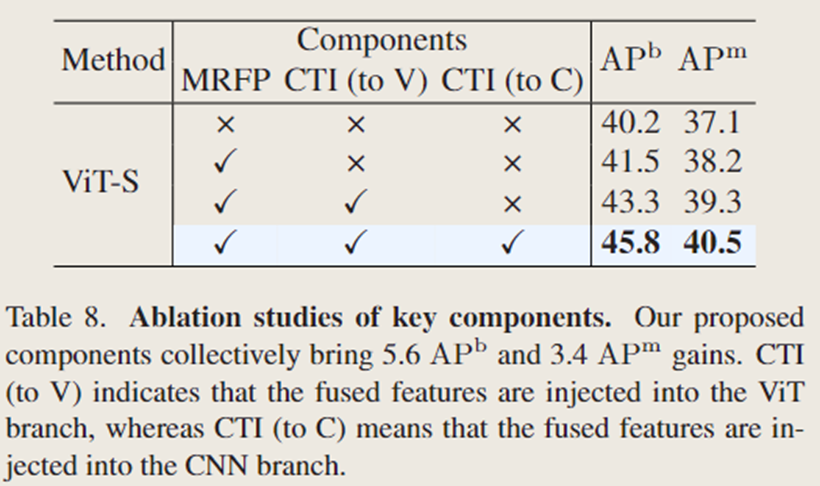
当使用多感受野特征金字塔(MRFP)向普通 ViT 提供卷积神经网络(CNN)的多尺度和多感受野特征时(特征直接相加),边界框平均精度(APb)提高了(1.3%),掩码平均精度(APm)提高了(1.1%)。此外,用本文提出的卷积神经网络 - Transformer 双向融合交互模块(CTI)替换 "直接相加" 操作。当仅使用 CTI(作用于 ViT 分支,即 CTI (to V))时,模型的边界框平均精度(APb)提高了(1.8%),掩码平均精度(APm)提高了(1.1%);当同时使用 CTI(作用于 ViT 分支)和 CTI(作用于 CNN 分支,即 CTI (to C))时,性能进一步显著提升,边界框平均精度(APb)提高了(2.5%),掩码平均精度(APm)提高了(1.2%) 。总体而言,与普通 ViT 相比,文中的 ViT-CoMer 在边界框平均精度(APb)上显著提高了(5.6%),在掩码平均精度(APm)上提高了(3.4%)。
3.3 双向融合交互的数量
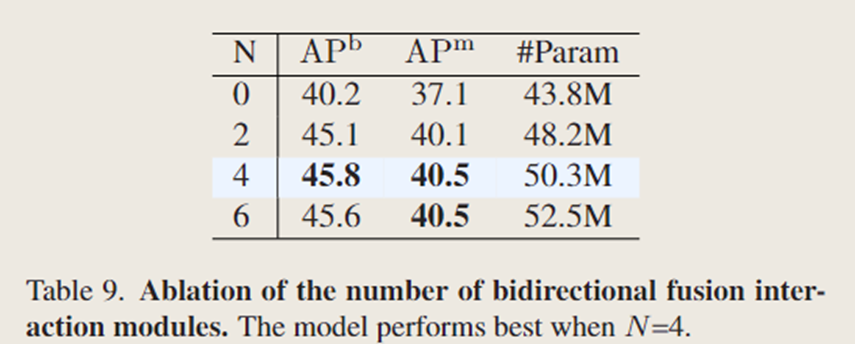
3.4 MRFP中不同卷积核大小
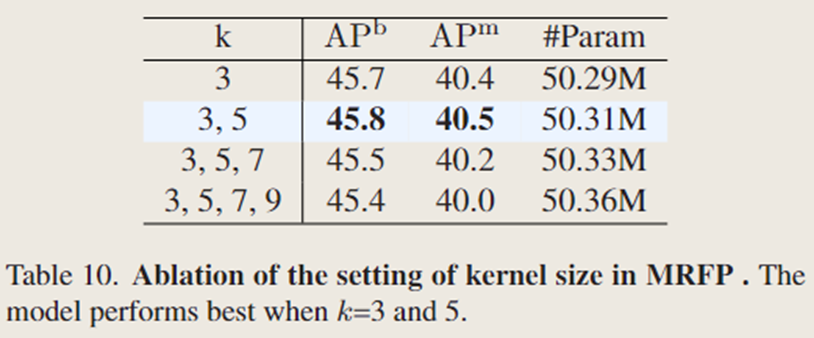
3.5 可扩展性
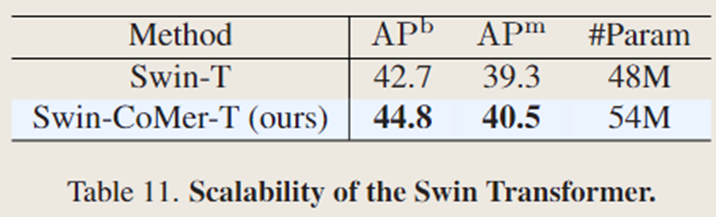
文中的方法也可以应用于诸如 Swin 之类的分层视觉 Transformer。文中的方法使 Swin-T 的边界框平均精度(box AP)提升了(+2.1%),掩码平均精度(mask AP)提升了(+1.2%)。由于 Swin 架构已经引入了归纳偏置,与普通的 ViT 相比,性能提升幅度略低。
3.6 定性结果
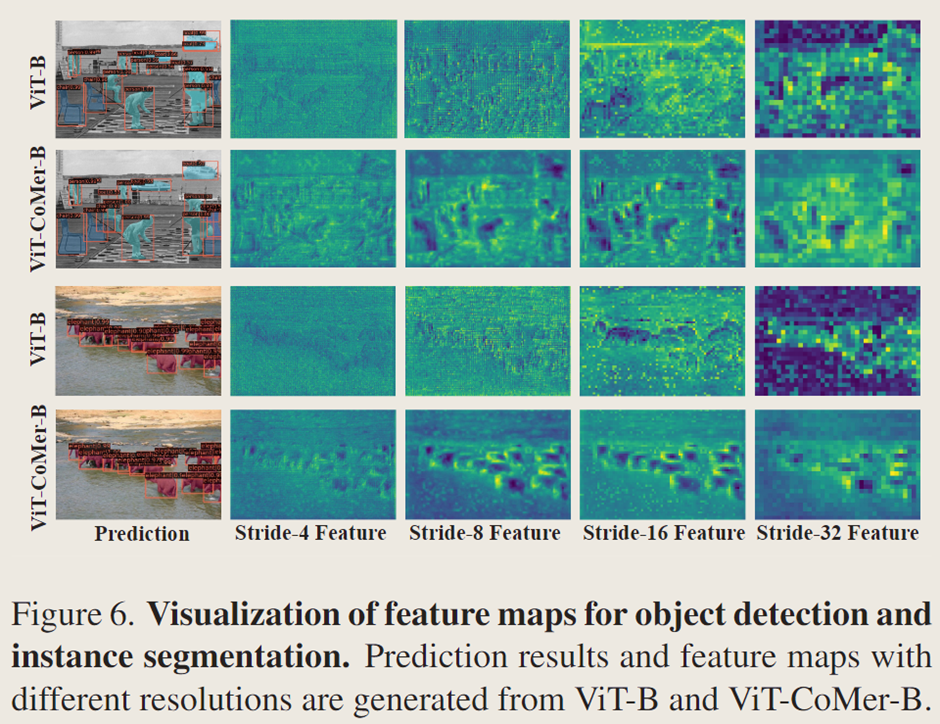
根据 iFormer,普通的视觉 Transformer(ViT)由于自注意力操作,倾向于捕获图像中的全局和低频特征,而卷积神经网络(CNN)由于卷积操作,倾向于捕获图像中的局部和高频特征。然而,在密集预测任务中,图像中会出现不同大小和密度的各种物体,这要求模型具备同时提取和捕获局部与全局、高频与低频特征的能力。文中通过可视化不同层(下采样率为 1/4、1/8、1/16 和 1/32)的特征图,对普通 ViT 和文中提出的 ViT-CoMer 在实例分割和目标检测任务中的差异进行了定性评估。如图可以看出,与普通 ViT 相比,文中的 ViT-CoMer 生成了更细粒度的多尺度特征,从而增强了模型的目标定位能力。