本篇我们来看一下自动驾驶传感器配置一个非常重要的模块,也就是传感器的标定。这里主要是对我之前修改的功能包的使用进行一个介绍.
对应的资源也已经上传了,0积分下载
安装
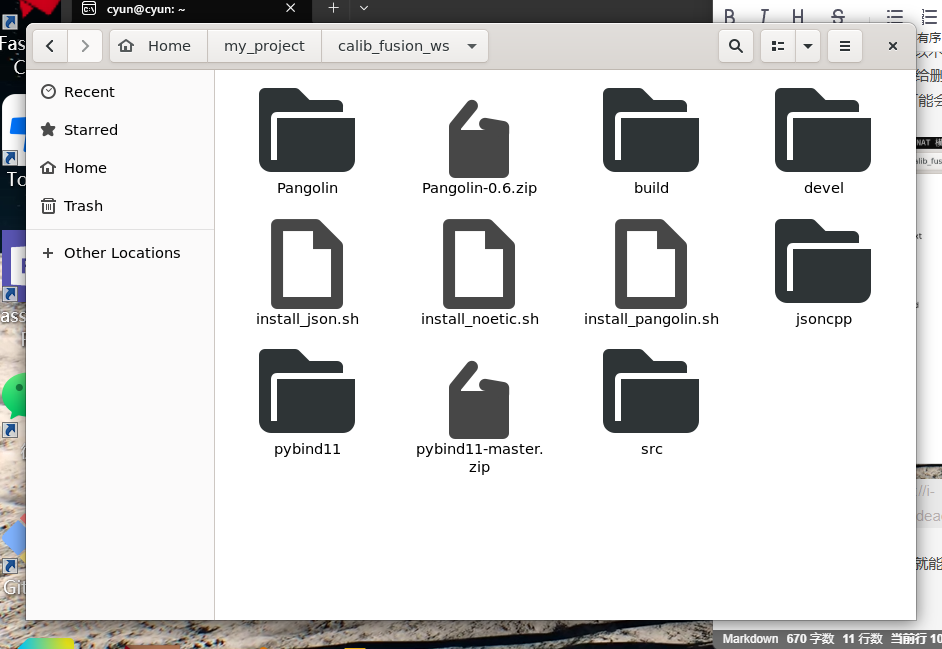
首先整个项目是使用ros1来进行启动的,但是要想正常编译,需要先安装三个对应的库.为了便于安装,我已经将安装功能封装成了对应的脚本.中间那个install_noetic.sh不是,其余两个是.
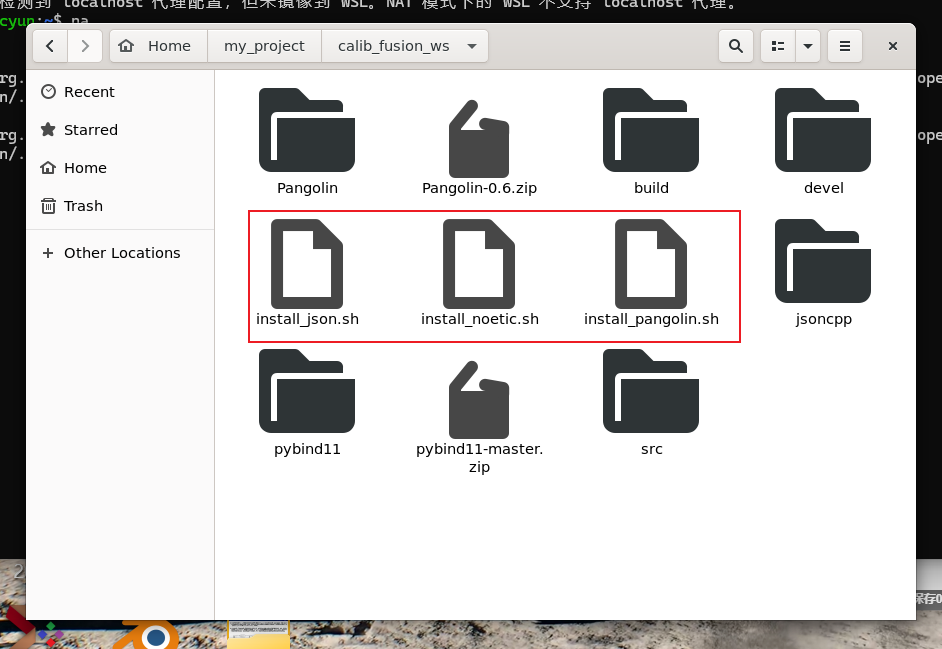
同时这里也提供对应库的源项目,分别是jsoncpp,pybind11,和Pangolin.接下来看一下对应的脚本怎么进行的:
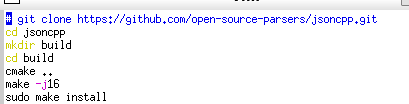
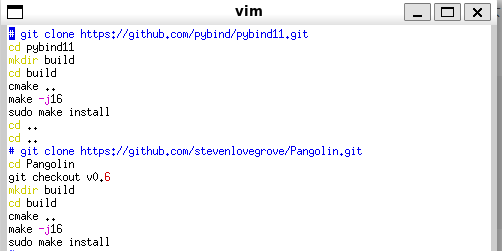
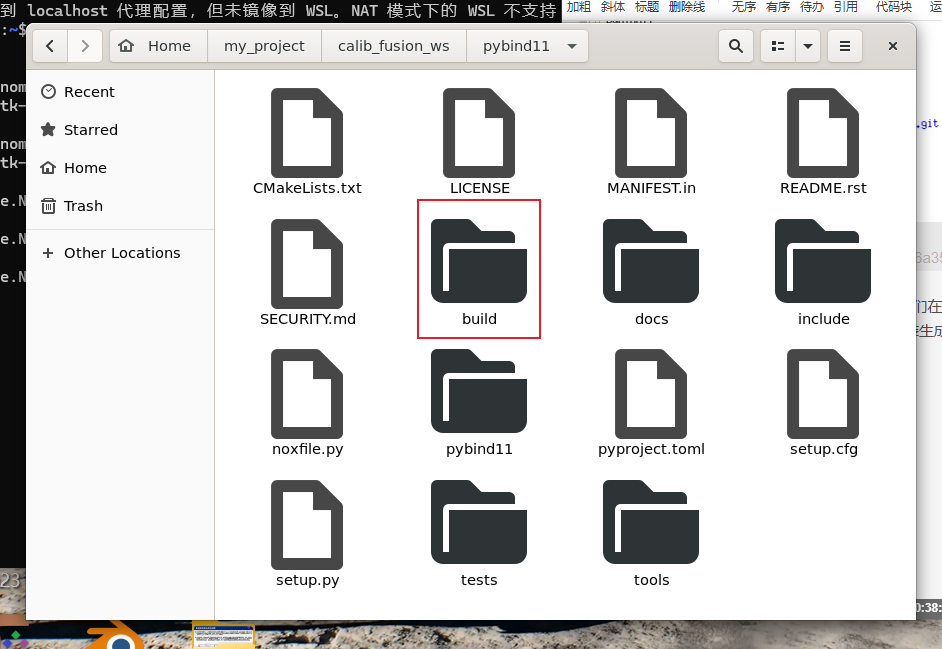
由于项目源文件已经有了,所以不需要git clone了,我们在运行这两个脚本之前,需要先将源文件中的build给删除(这是上一次安装生成的文件,所以最好是删除掉防止干扰),否则安装可能会失败.
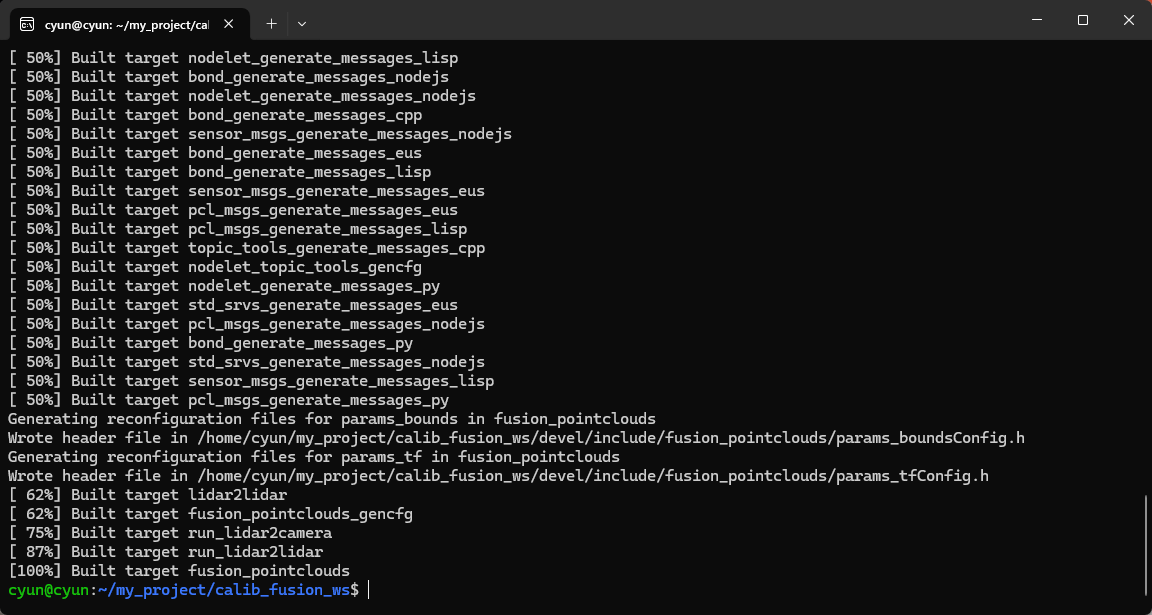
正常安装完三个依赖项之后,就能正常进行编译了:
在对应的工作空间下执行catkin_make
雷达标定
对于雷达与雷达的标定,我们运行:
bash
source devel/setup.bash
roslaunch lidar2lidar run_lidar2lidar.launch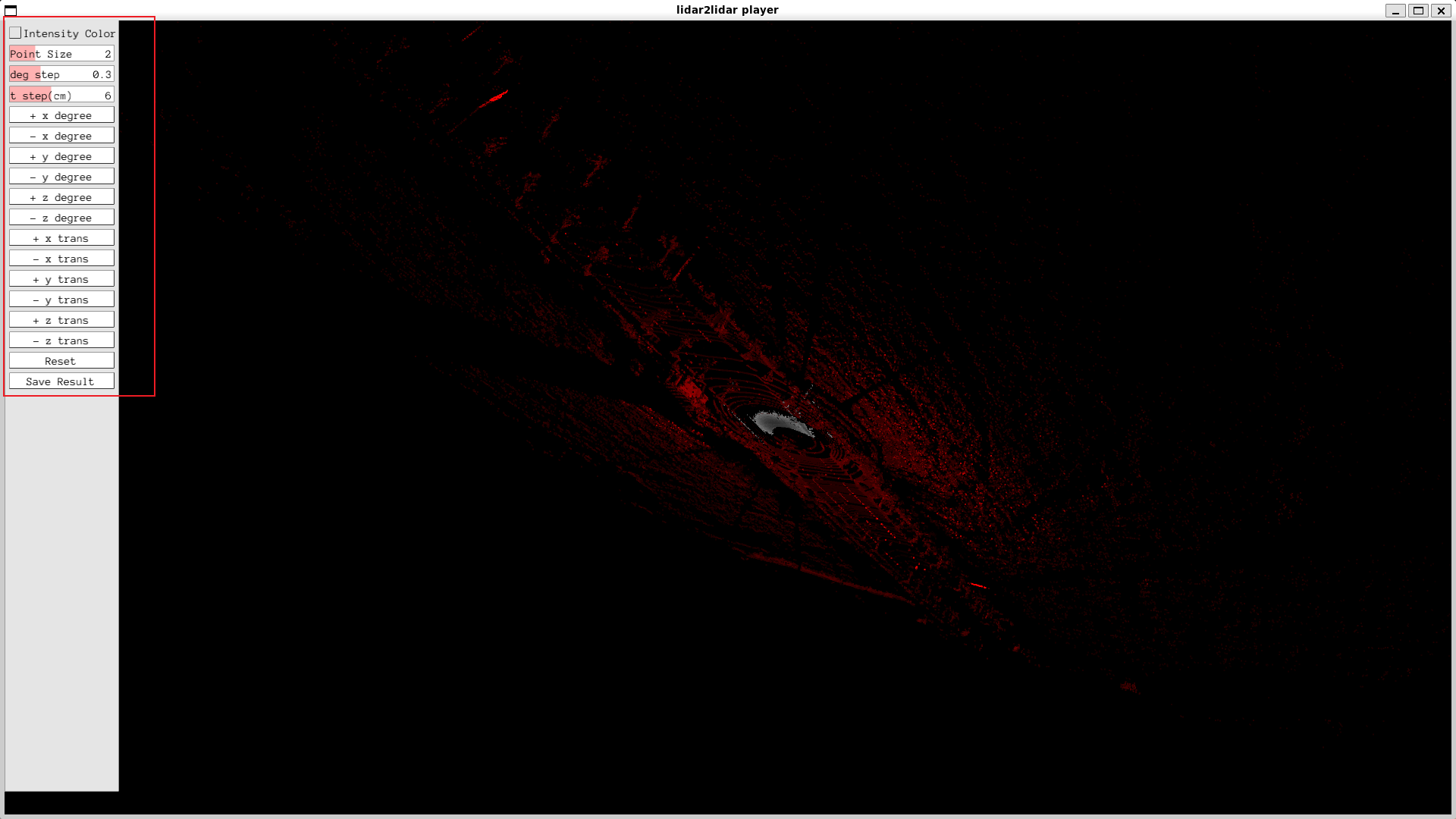
调整右侧的参数,直到主点云和标定点云重合在一起.
可以看一下如何去启动的luanch:
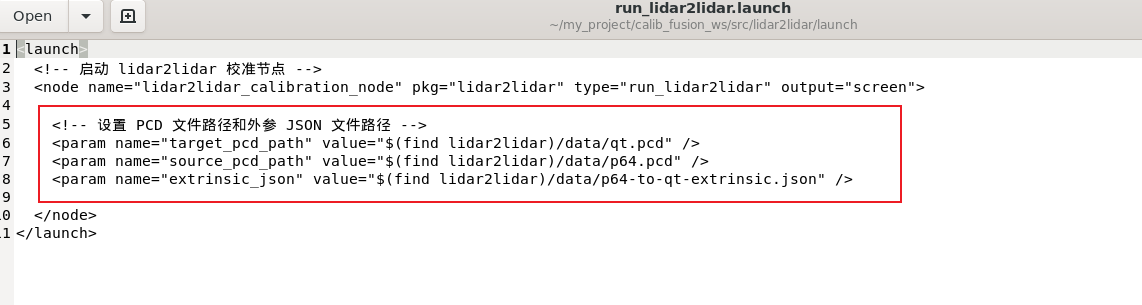
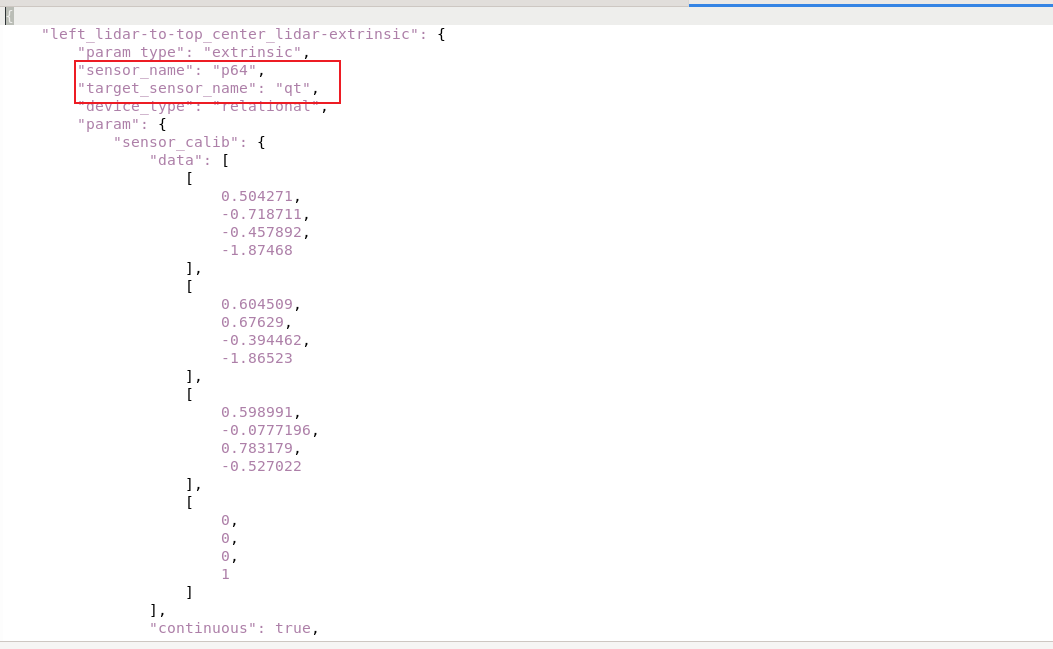
需要配置的三个参数就比较明显了,分别就是主雷达,需要标定的雷达,以及初始的旋转平移矩阵,这是一个json文件,并且是将旋转平移矩阵完全展开了,是一个4×4的矩阵形式.比如这里是把p64标定到qt点云中
当然点云的pcd需要自己去转一下,使用pcl_ros 的工具即可转换话题为一个pcd,/your_pointcloud_topic改为对应的话题,当然,采集时是需要禁止的,点云不能运动:
bash
rosrun pcl_ros pointcloud_to_pcd input:=/your_pointcloud_topic如果没有的话需要先安装一下
bash
sudo apt-get install ros-$ROS_DISTRO-pcl-ros这样就能完成两帧点云的标定了.
自动标定思路
自动标定利用的其实就是两帧点云的匹配关系,也就是我们定位中使用的ndt算法,只要给一个大致的初始点云位姿,就能比较快速的收敛,也就完成了激光雷达点云的半自动标定过程.
至于这里的ndt的标定的过程,这里就不赘述了,是不需要使用原始的ndt定位的,ndt的实现中,是有直接对于两帧点云的处理的,然后可以只对那部分进行编写,当然,为了能够快速收敛,还是需要有初始位姿的,如果初始位姿比较奇怪,人当然也是很难给出这个初始位姿的大致的值的.除了雷达之间的关系并不大,不难也比较麻烦.所以这里先只需要停留在这个思路上.
雷达与相机的标定
这个外参的标定就是需要将图片与点云进行一个对应,所以在标定之前,最好是要让图片中的特征和点云的特征明显一点
启动方式
bash
source devel/setup.bash
roslaunch lidar2camera run_lidar2camera.launch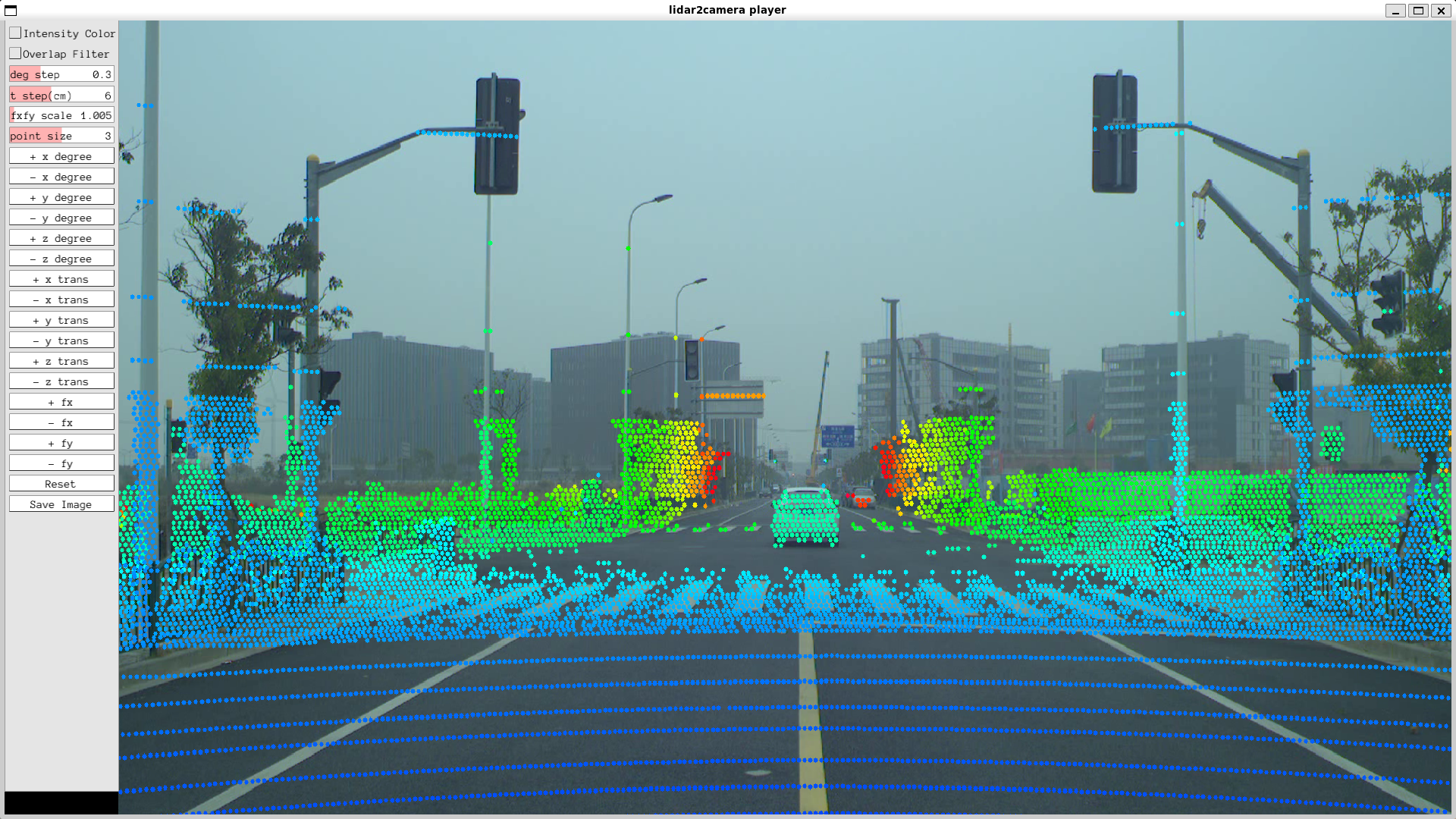
此时这里的launch就表示为
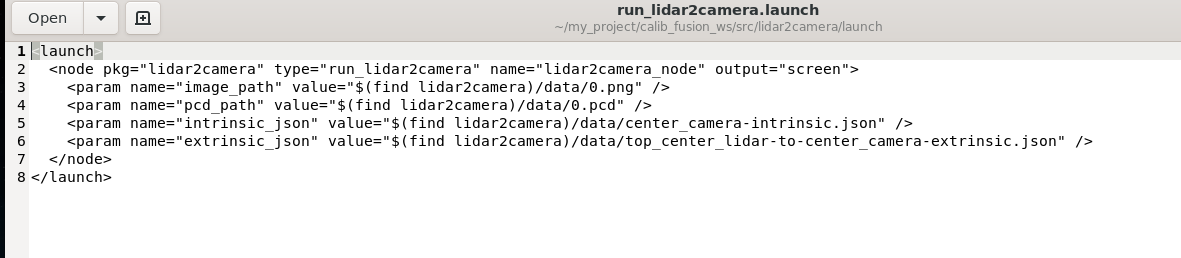
这里有四个东西作为输入,一个是图片png,一个是雷达点云pcd,一个是相机的内参center_camera-intrinsic.json,以及雷达和相机的外参(也是初始参数,修改的时候变的就是这个)
bash
{
"center_camera-intrinsic": {
"sensor_name": "center_camera",
"target_sensor_name": "center_camera",
"device_type": "camera",
"param_type": "intrinsic",
"param": {
"img_dist_w": 1920,
"img_dist_h": 1080,
"cam_K": {
"rows": 3,
"cols": 3,
"type": 6,
"continuous": true,
"data": [
[
2109.75,
0,
949.828
],
[
0,
2071.72,
576.237
],
[
0,
0,
1
]
]
},
"cam_dist": {
"rows": 1,
"cols": 4,
"type": 6,
"continuous": true,
"data": [
[
-0.10814499855041504,
0.1386680006980896,
-0.0037975700106471777,
-0.004841269925236702
]
]
}
}
}
}
bash
{
"top_center_lidar-to-center_camera-extrinsic": {
"sensor_name": "top_center_lidar",
"target_sensor_name": "center_camera",
"device_type": "relational",
"param_type": "extrinsic",
"param": {
"time_lag": 0,
"sensor_calib": {
"rows": 4,
"cols": 4,
"type": 6,
"continuous": true,
"data": [
[
0.0125908,
-0.999895,
-0.00713773,
-0.0322306
],
[
0.0119283,
0.00728786,
-0.999902,
-0.352079
],
[
0.99985,
0.0125045,
0.0120187,
-0.574468
],
[
0,
0,
0,
1
]
]
}
}
}
}同样的也是调整可视化界面中的参数的值,让特征能够对应上即可.