rootroot@rootroot-X99-Turbo:~
rootroot@rootroot-X99-Turbo:\~ git clone https://github.com/friendlyarm/sd-fuse_h3 -b master --single-branch sd-fuse_h3
rootroot@rootroot-X99-Turbo:~ cd sd-fuse_h3/
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3 ll
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3 ll *.sh
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3 tar zxvf friendlycore-jammy-images.tgz
【可选编译uboot,确认/熟悉 友善之臂的编译指令】
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3 git clone https://github.com/friendlyarm/u-boot -b sunxi-v2017.x --depth 1 uboot
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3 UBOOT_SRC=uboot ./build-uboot.sh friendlycore-jammy
【编译生成Z:\\sd-fuse_h3\\friendlycore-jammy\\u-boot-sunxi-with-spl.bin】
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3 ll
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3 git clone https://github.com/friendlyarm/linux -b sunxi-4.14.y --depth 1 kernel
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3 ll
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3 cd kernel
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3/kernel
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3/kernel ll
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3/kernel touch .scmversion
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3/kernel
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3/kernel make ARCH=arm CROSS_COMPILE=arm-linux- menuconfig
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3/kernel ll
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3/kernel make ARCH=arm CROSS_COMPILE=arm-linux- savedefconfig
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3/kernel cp defconfig ./arch/arm/configs/my_defconfig
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3/kernel
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3/kernel git add ./arch/arm/configs/my_defconfig
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3/kernel
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3/kernel git status
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3/kernel cd -
/home/rootroot/sd-fuse_h3
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3 KERNEL_SRC=kernel KCFG=my_defconfig ./build-kernel.sh friendlycore-jammy
【编译异常了,找不到kernel。直接用编译生成的zImage和 SD卡启动的固件的BOOT分区打包成为boot.img】
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3 mkdir BOOT
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3 ll *.sh
rootroot@rootroot-X99-Turbo:~/sd-fuse_h3 ll
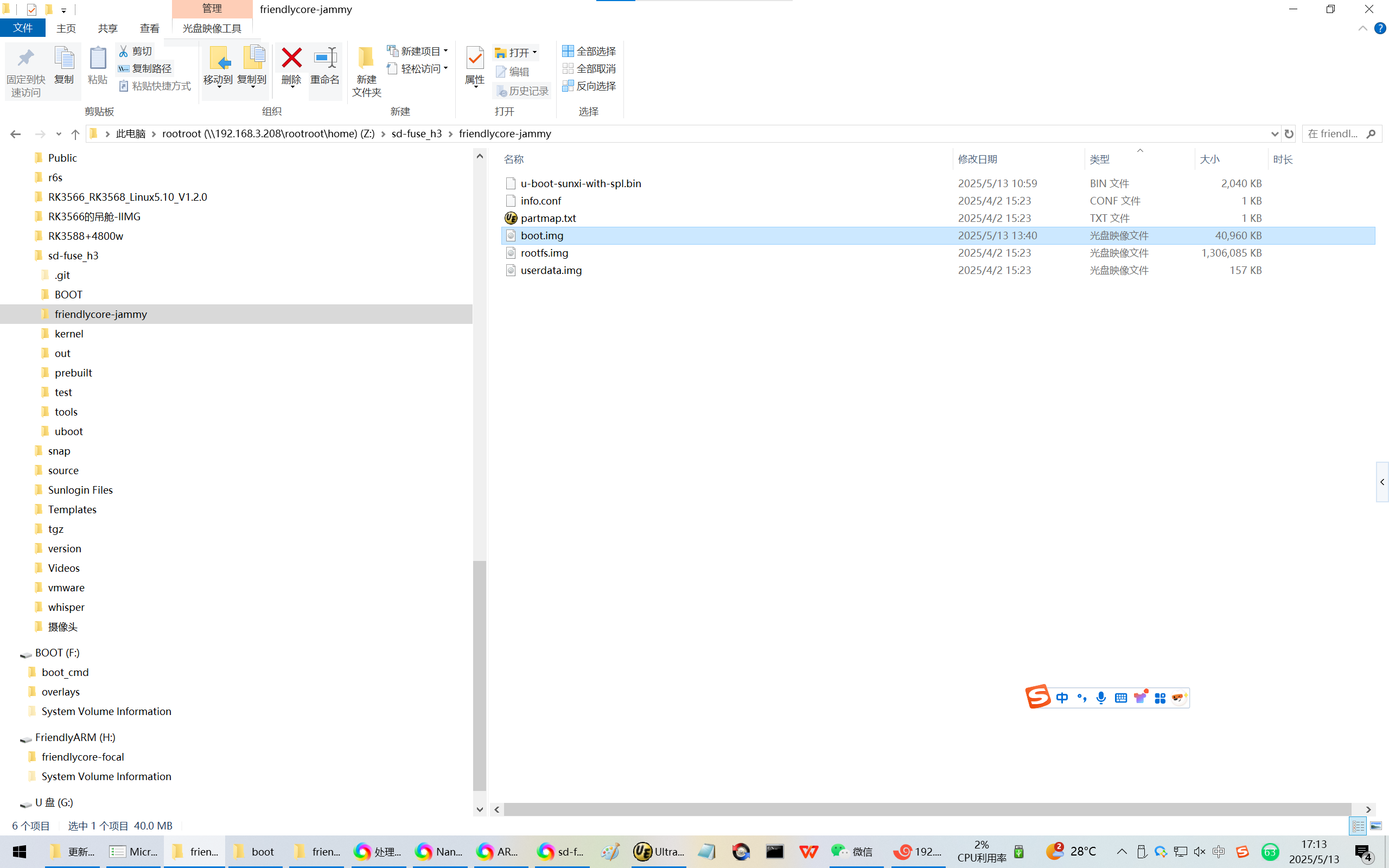
rootroot@rootroot-X99-Turbo:\~/sd-fuse_h3 ./build-boot-img.sh BOOT/ friendlycore-jammy/boot.img
20250512给NanoPi NEO core开发板在Ubuntu core20.04系统更新boot.img
2025/5/13 17:14
请使用以下压缩包/IMG固件写TF卡之后的BOOT分区:
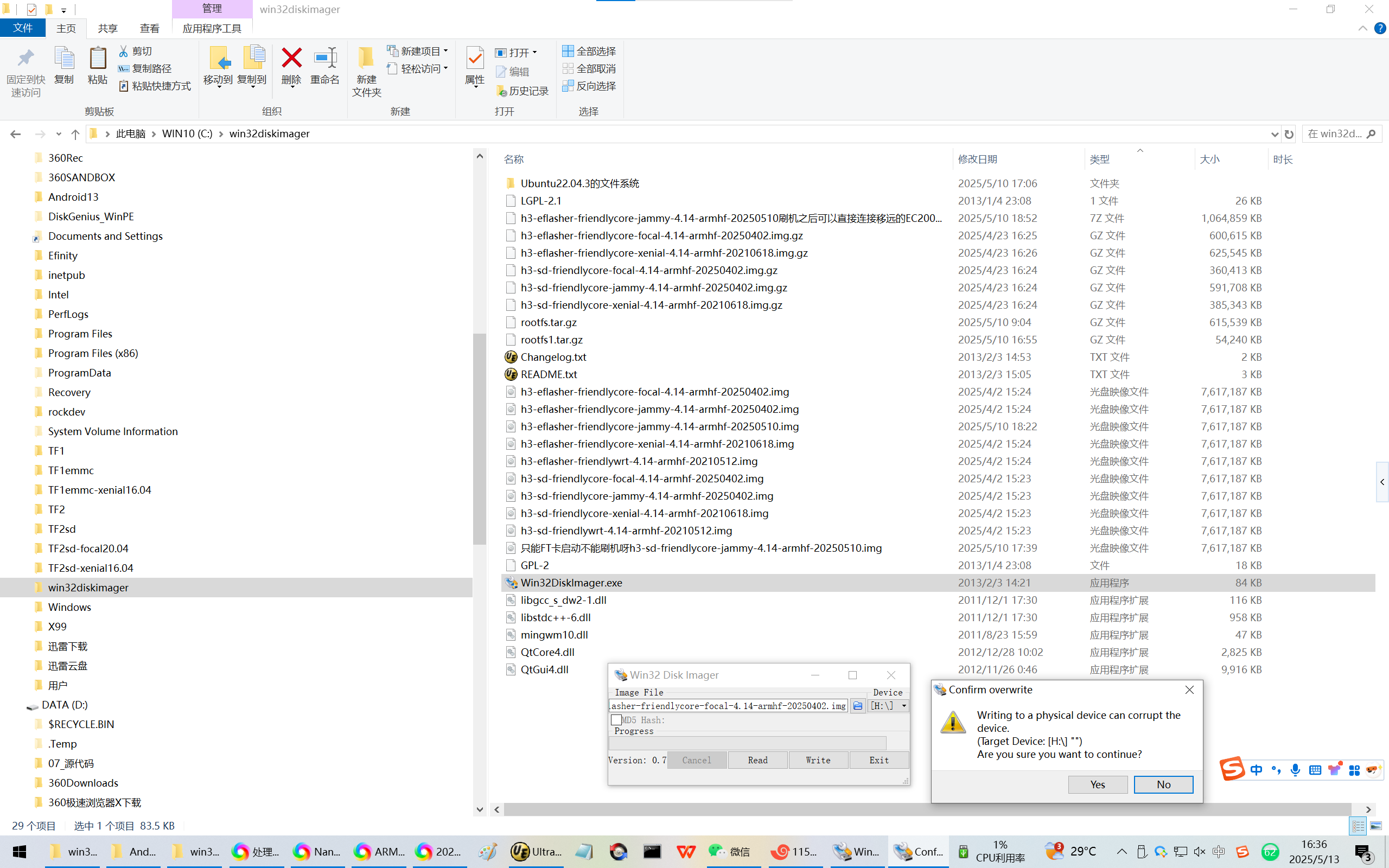
h3-sd-friendlycore-xenial-4.14-armhf-20210618.img.gz
h3-sd-friendlycore-focal-4.14-armhf-20250402.img.gz
h3-sd-friendlycore-jammy-4.14-armhf-20250402.img.gz
一定不能使用:【不用试了,这些固件的BOOT分区会死在uboot启动之后了】
h3-eflasher-friendlycore-xenial-4.14-armhf-20210618.img.gz
h3-eflasher-friendlycore-focal-4.14-armhf-20250402.img.gz
h3-eflasher-friendlycore-jammy-4.14-armhf-20250402.img.gz
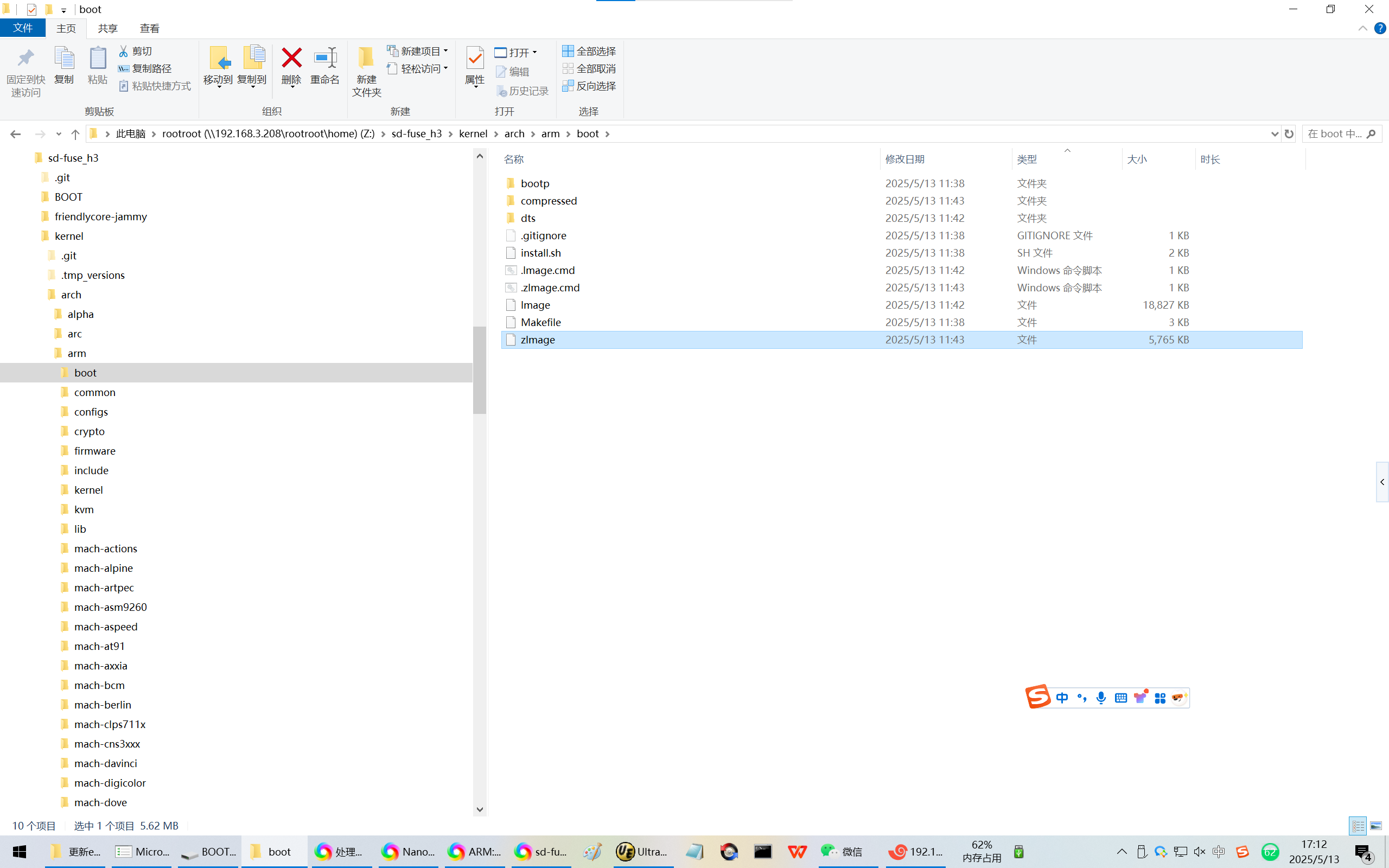
Z:\sd-fuse_h3\kernel\arch\arm\boot\zImage
替换:
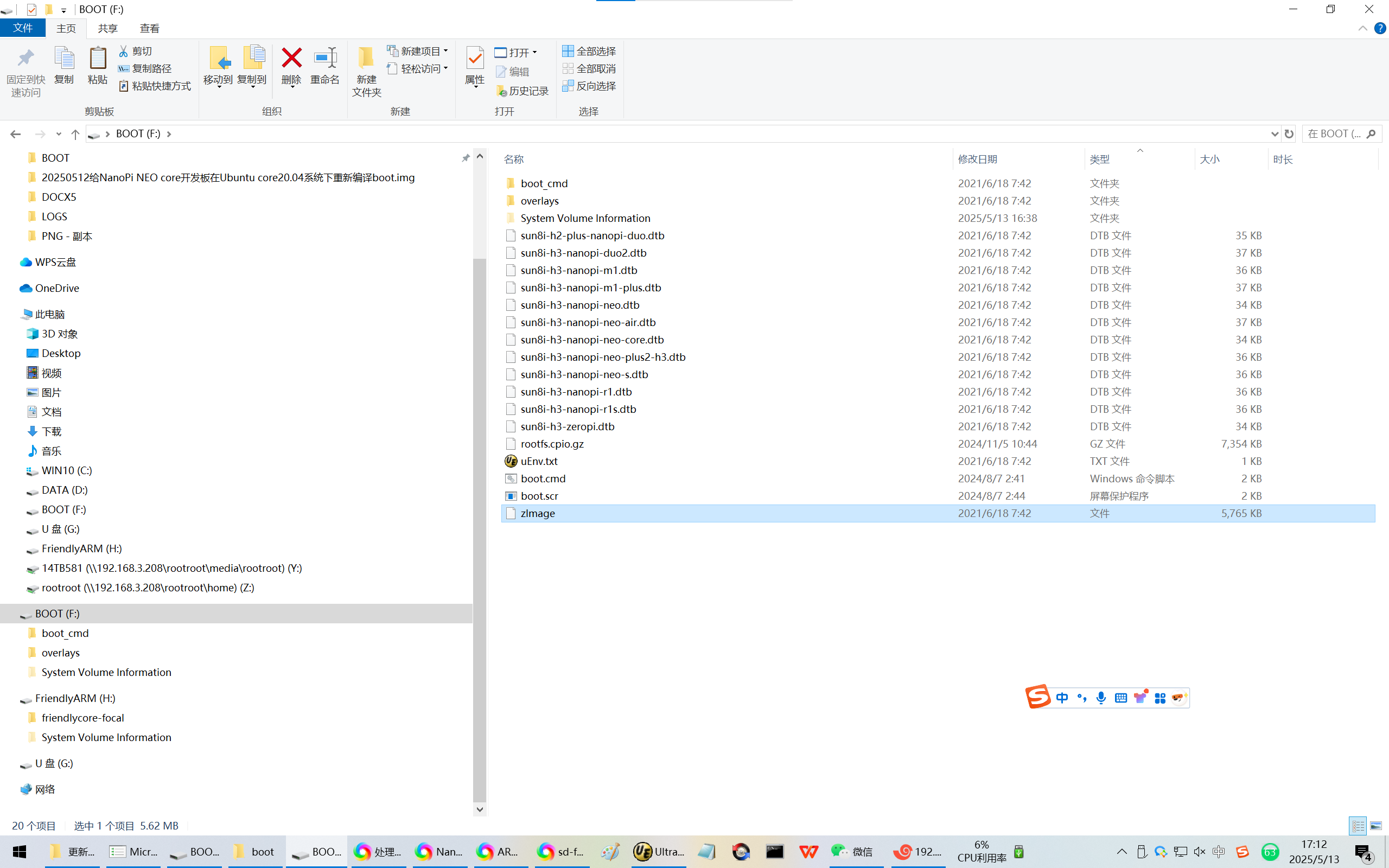
F:\zImage
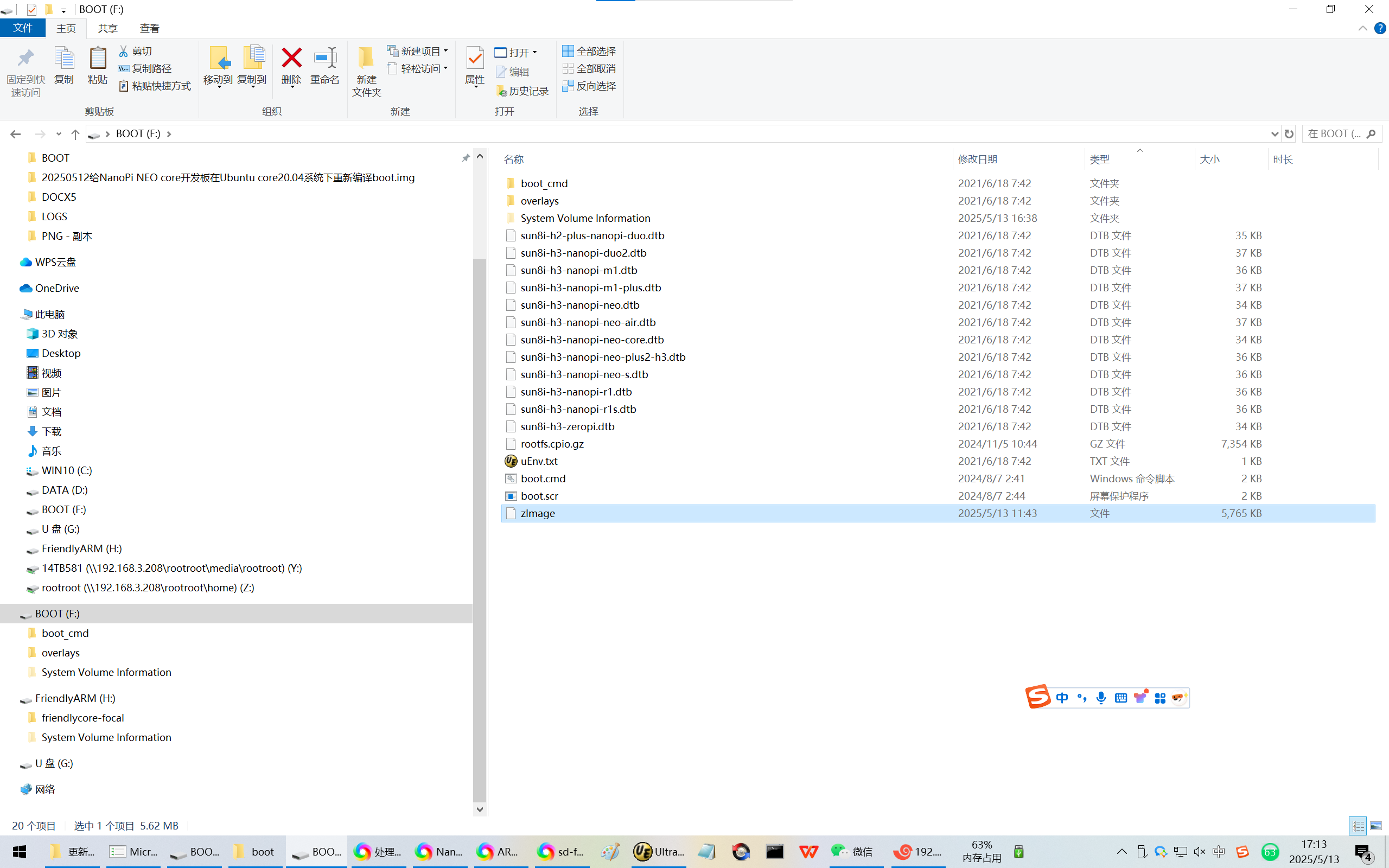
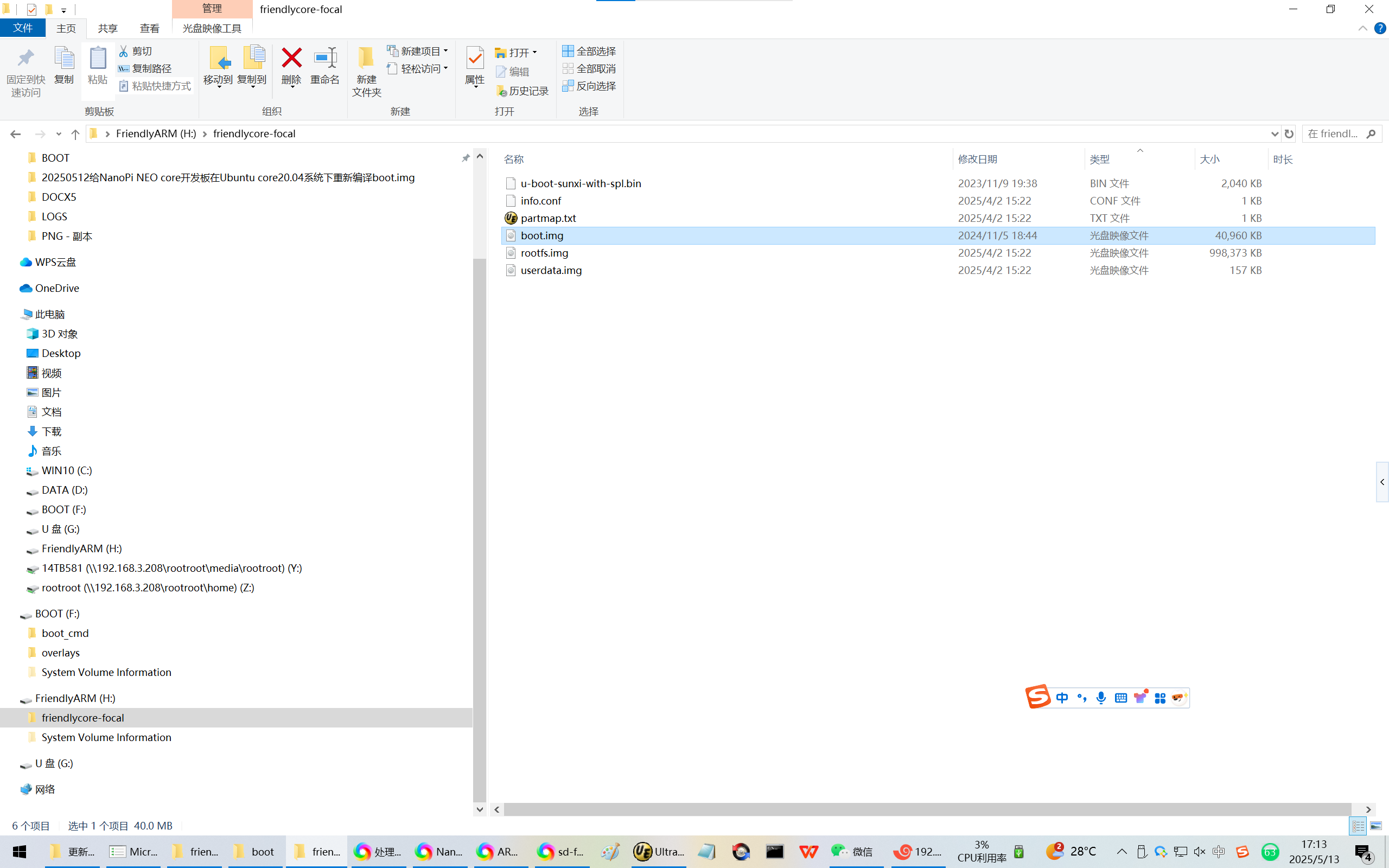
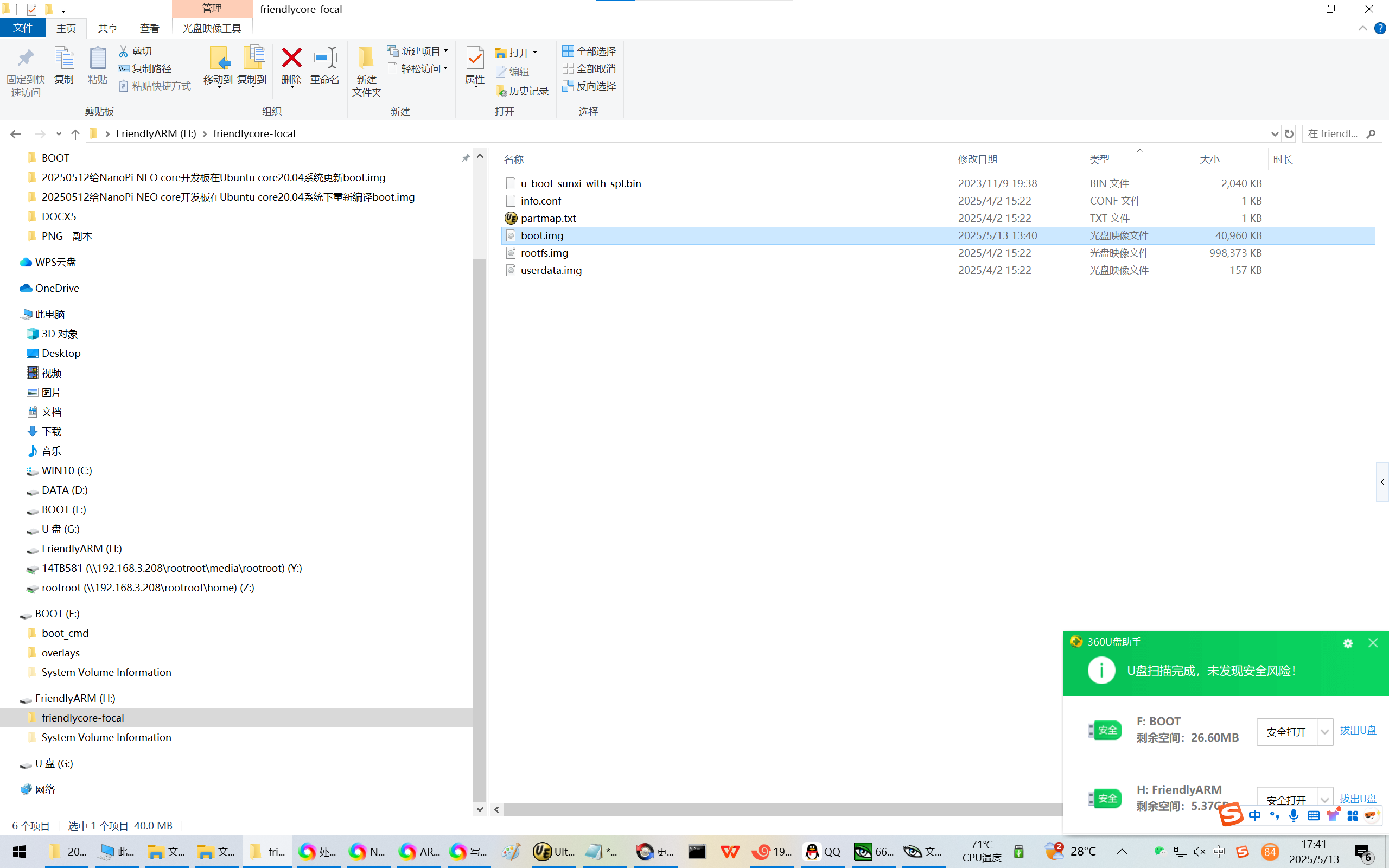
Z:\sd-fuse_h3\friendlycore-jammy\boot.img
替换:
H:\friendlycore-focal\boot.img
OK Created slice system-getty.slice.
OK Started Modem Manager.
OK Started Hostname Service.
Starting Network Manager Script Dispatcher Service...
OK Started Dispatcher daemon for systemd-networkd.
OK Started Network Manager Script Dispatcher Service.
OK Finished Network Manager Wait Online.
OK Reached target Network is Online.
Starting LSB: disk temperature monitoring daemon...
Starting /etc/rc.local Compatibility...
21.987533 rc.local590: ctp = 0
OK Started /etc/rc.local Compatibility.
Ubuntu 20.04 LTS NanoPi-NEO-Core ttyS0
NanoPi-NEO-Core login: pi (automatic login)
| __| __() ___ _ __ _| | | _| ____| | | ____/ ___|
| |_ | '__| |/ _ \ '_ \ / _` | | | | | _| | | | _|| |
| || | | | __/ | | | (| | | || | || || || |__
|| || ||\|| ||\,||\, |||_____\____|
|___/
Welcome to Ubuntu 20.04 LTS 4.14.111
System load: 1.03 Up time: 23 sec
Memory usage: 14 % of 491Mb IP:
CPU temp: 33°C
Usage of /: 10% of 6.0G
* Documentation: http://wiki.friendlyarm.com/Ubuntu
* Forum: http://www.friendlyarm.com/Forum/
The programs included with the Ubuntu system are free software;
the exact distribution terms for each program are described in the
individual files in /usr/share/doc/*/copyright.
Ubuntu comes with ABSOLUTELY NO WARRANTY, to the extent permitted by
applicable law.
To run a command as administrator (user "root"), use "sudo <command>".
See "man sudo_root" for details.
pi@NanoPi-NEO-Core:~$
pi@NanoPi-NEO-Core:~$ su
Password:
root@NanoPi-NEO-Core:/home/pi#
root@NanoPi-NEO-Core:/home/pi#
root@NanoPi-NEO-Core:/home/pi# cd /
root@NanoPi-NEO-Core:/#
root@NanoPi-NEO-Core:/#
root@NanoPi-NEO-Core:/# cat /etc/issue
Ubuntu 20.04 LTS \n \l
root@NanoPi-NEO-Core:/#
root@NanoPi-NEO-Core:/# uname -a
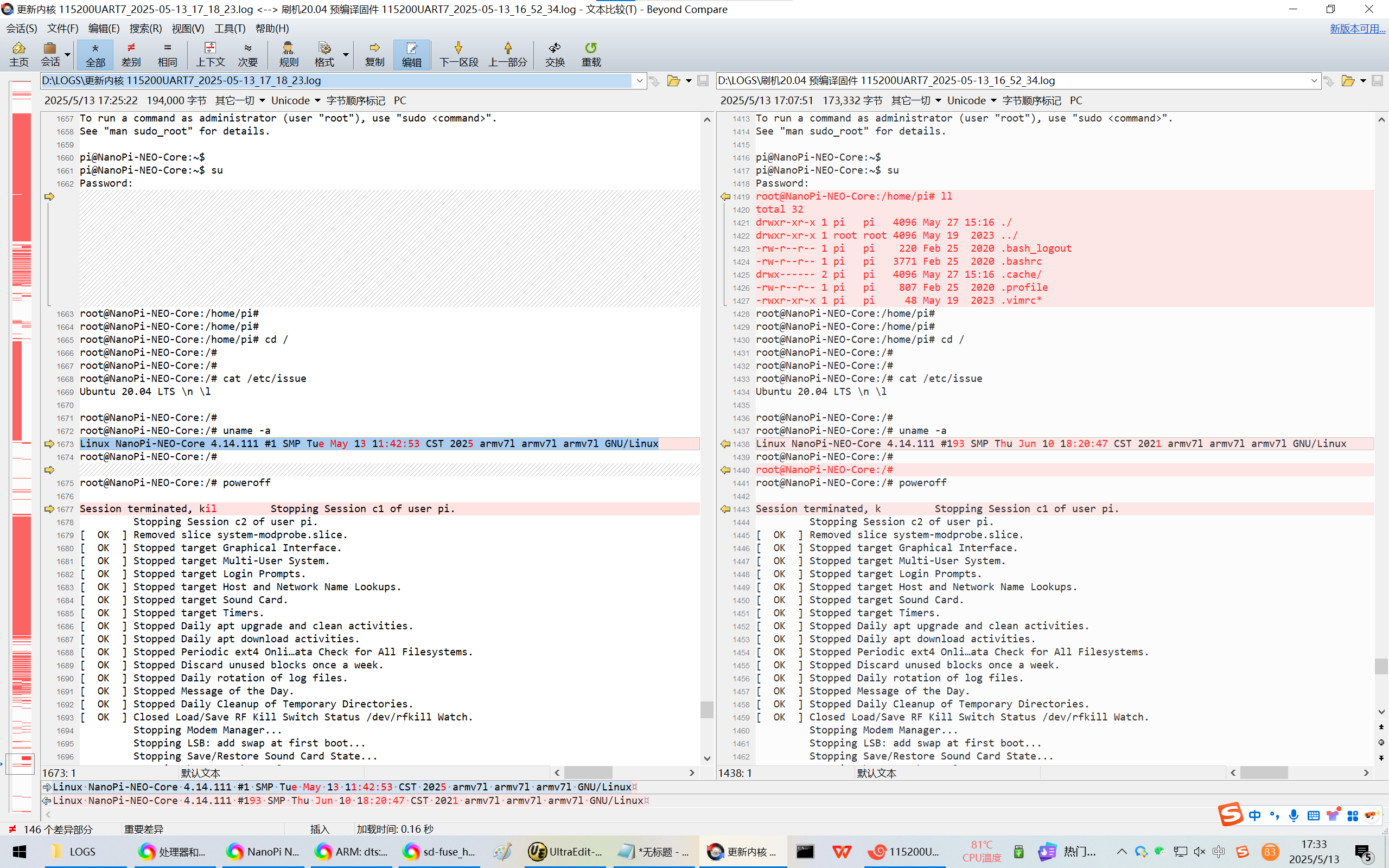
Linux NanoPi-NEO-Core 4.14.111 #1 SMP Tue May 13 11:42:53 CST 2025 armv7l armv7l armv7l GNU/Linux
root@NanoPi-NEO-Core:/#
root@NanoPi-NEO-Core:/#
【很容易发现内核编译时间已经更新为今天的了!】