title: 车载以太网驱动专用车智能化:域控架构设计与开发实践
date: 2023-12-01
categories: 新能源汽车
tags: 车载以太网, 电子电气架构, 域控架构, 专用车智能化, SOME/IP, AUTOSAR
引言:专用车智能化转型的挑战与机遇
专用车作为城市建设与工业运输的核心载体,其智能化需求日益迫切。传统改装模式依赖CAN总线,面临节点数量激增、线束复杂、功能扩展性差等瓶颈。而车载以太网凭借**高带宽(千兆级)、低延迟(微秒级)、轻量化线束(减少30%重量)**等优势,成为下一代电子电气架构(EEA)的核心技术。本文以某环卫车项目为例,深入解析基于车载以太网的域控架构设计,为行业提供可落地的解决方案。
目录
- 车载以太网:专用车架构升级的"高速公路"
- 1.1 技术优势与协议栈解析
- 1.2 以太网在专用车中的典型应用场景
- 域控架构设计:专用车智能化的"神经中枢"
- 2.1 架构分层与域控制器定义
- 2.2 通信策略:以太网与CAN的融合设计
- 2.3 案例解析:环卫车的障碍物联动控制
- 面向服务(SOA)的开发实践
- 3.1 服务定义与接口设计
- 3.2 代码示例:SOME/IP服务接口实现
- 3.3 工具链与开发流程
- 总结与未来展望
- 互动讨论
一、车载以太网:专用车架构升级的"高速公路"
1.1 技术优势与协议栈解析
- 带宽跃升:支持千兆级传输(如IEEE 802.3bw标准),满足ADAS、远程控制等大数据需求。
- 线束精简:单对非屏蔽双绞线实现全双工通信,降低30%线束重量。
- 服务化通信:基于IP协议的服务交互(SOA),替代传统信号交互,支持功能动态扩展。
协议栈分层:
| 层级 | 协议/标准 | 核心功能 |
|---|---|---|
| 物理层 | IEEE 802.3bw | 一对双绞线千兆传输 |
| 网络层 | IPv4/IPv6 | 跨域寻址与路由 |
| 传输层 | TCP/UDP | 数据可靠性保障 |
| 应用层 | SOME/IP、DoIP | 服务动态发现与诊断 |
1.2 以太网在专用车中的典型应用场景
- 实时监控:环卫车水炮状态、垃圾压缩进度通过以太网回传至云端。
- 远程控制:工程车辆通过5G+以太网实现远程启停与故障诊断。
- OTA升级:基于以太网的高带宽实现车载软件分钟级更新。
二、域控架构设计:专用车智能化的"神经中枢"
2.1 架构分层与域控制器定义
针对专用车场景,采用**"中央网关+三域控制器"**架构(图1):
- 中央网关:全局通信枢纽,协调跨域服务交互。
- 底盘域(CCDC):负责车辆运动控制(如转向、制动)。
- 车身上装域(B&UCDC):管理专用设备(如环卫水炮、垃圾压缩)。
- 智能驾驶域(ICDC) :集成环境感知与决策算法。
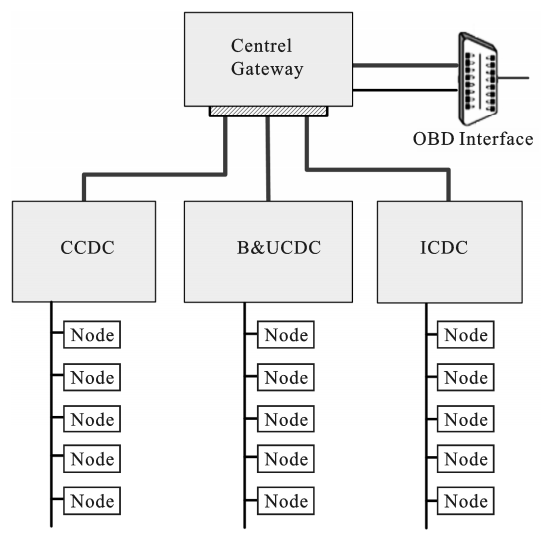
图1:基于车载以太网的域控架构(中央网关+三域控制器)
2.2 通信策略:以太网与CAN的融合设计
- 以太网骨干网:连接中央网关与域控制器,传输高带宽数据(如点云、视频流)。
- CAN子网:域内实时控制(如电机转速指令),确保低延迟。
2.3 案例解析:环卫车的障碍物联动控制
- 场景:ICDC通过摄像头检测到行人,需立即停止水炮作业。
- 服务交互流程 :
- ICDC发布
障碍物识别服务(Service ID: 0x0200)。 - B&UCDC订阅该服务,触发
水炮停止指令(Method接口)。 - 指令通过以太网骨干网传输,响应延迟<10ms。
- ICDC发布
三、面向服务(SOA)的开发实践
3.1 服务定义与接口设计
- 基础服务 :跨域复用(如
设备状态上报)。 - 应用服务 :场景定制(如
水炮角度调节)。
服务接口示例:
| 服务ID | 服务名称 | 提供方 | 消费方 | 接口类型 |
|---|---|---|---|---|
| 0x0100 | 上装状态信息 | B&UCDC | ICDC/CCDC | EVENT |
| 0x1002 | 上装控制 | B&UCDC | 云端平台 | RR-Method |
3.2 代码示例:SOME/IP服务接口实现
cpp
// SOME/IP服务定义示例(伪代码)
service UpperControl {
// Event组:上装状态信息
eventgroup UpperStatus {
event WaterLevel : uint8_t;
event ValveState : bool;
};
// Method:水炮角度控制
method SetSprayAngle(in float angle, out bool result);
};
// 服务订阅与发布逻辑
void ICDC::subscribeToObstacleService() {
SOMEIP::Subscribe(service_id=0x0200, instance_id=0x01);
// 收到响应后触发回调函数
} 3.3 工具链与开发流程
基于PREEvision搭建工具链(图2):
- 需求设计 :输出功能清单与服务矩阵(参考模板)。
- 服务建模:定义服务接口与交互逻辑。
- 仿真验证 :通过CANoe模拟通信时序,验证服务可靠性。
- 代码生成 :导入Davinci配置AUTOSAR组件,自动生成可刷写代码。
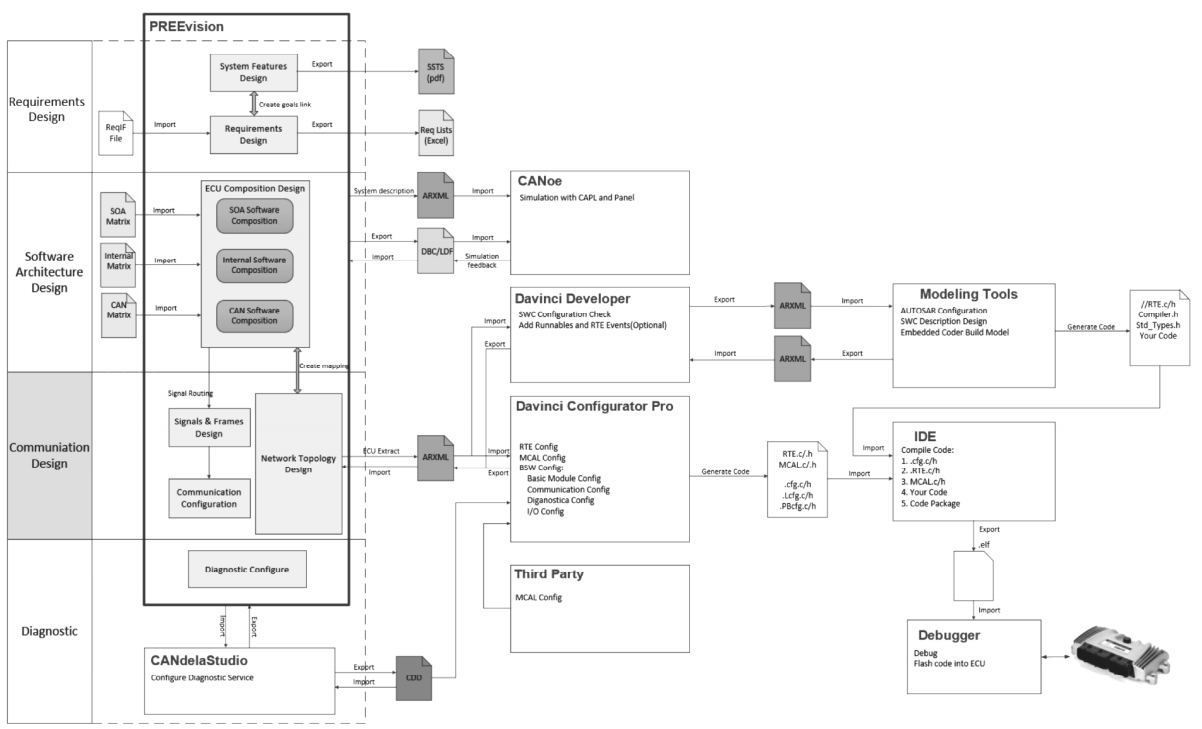
图2:基于PREEvision的SOA开发工具链
四、总结与未来展望
本文提出的域控架构已在环卫、工程等专用车中落地,实现上装系统与整车深度集成,功能迭代周期缩短40%。未来趋势包括:
- 中央计算平台:算力集中化(如NVIDIA DRIVE Orin),支持OTA无缝升级。
- 区域控制器:硬件资源按区域整合,进一步降低复杂度。
- 车云协同 :基于5G的远程诊断与协同控制(参考华为车云方案)。
是 否 是 否 需求场景 是否需要混合总线支持? 选择TC1054 Pro 是否要求低成本? 选择Mach转换器 选择Vector VN5650
五、互动讨论
投票:你认为车载以太网在商用车中面临的最大挑战是什么?
- 硬件成本过高
- 协议标准化不足
- 开发工具链不成熟
讨论 :欢迎在评论区分享你的项目经验或技术疑问,点赞+收藏本文可私信获取完整架构设计文档 与仿真案例代码!
参考文献
一键三连(点赞⭐️ 收藏📁 评论💬),获取更多技术干货! 🔥
作者简介 :深耕新能源汽车电子架构领域,主导多个专用车智能化项目,擅长以太网与SOA落地实践。关注我的专栏:总线工具:TSMaster、ZcanPRO、ZXdoc等系列,解锁《车载以太网实战手册》!