文章目录
前言
在ROS2的开发过程中,视觉信息总是不可或缺,所以这节讲一讲怎么订阅相机图像信息。
一、获取笔记本自带相机图像
1.打开终端
在Ubantu系统中,按下 Ctrl + Alt + T,即可打开终端。
2.安装usb-cam功能包
输入以下命令,并回车:
c
sudo apt install ros-humble-usb-cam
之后输入密码。
注意:在输入密码时,终端不会有任何数字产生,所以不要慌,输完按回车即可。
3.启动相机节点
输入以下命令,并回车:
c
ros2 run usb_cam usb_cam_node_exe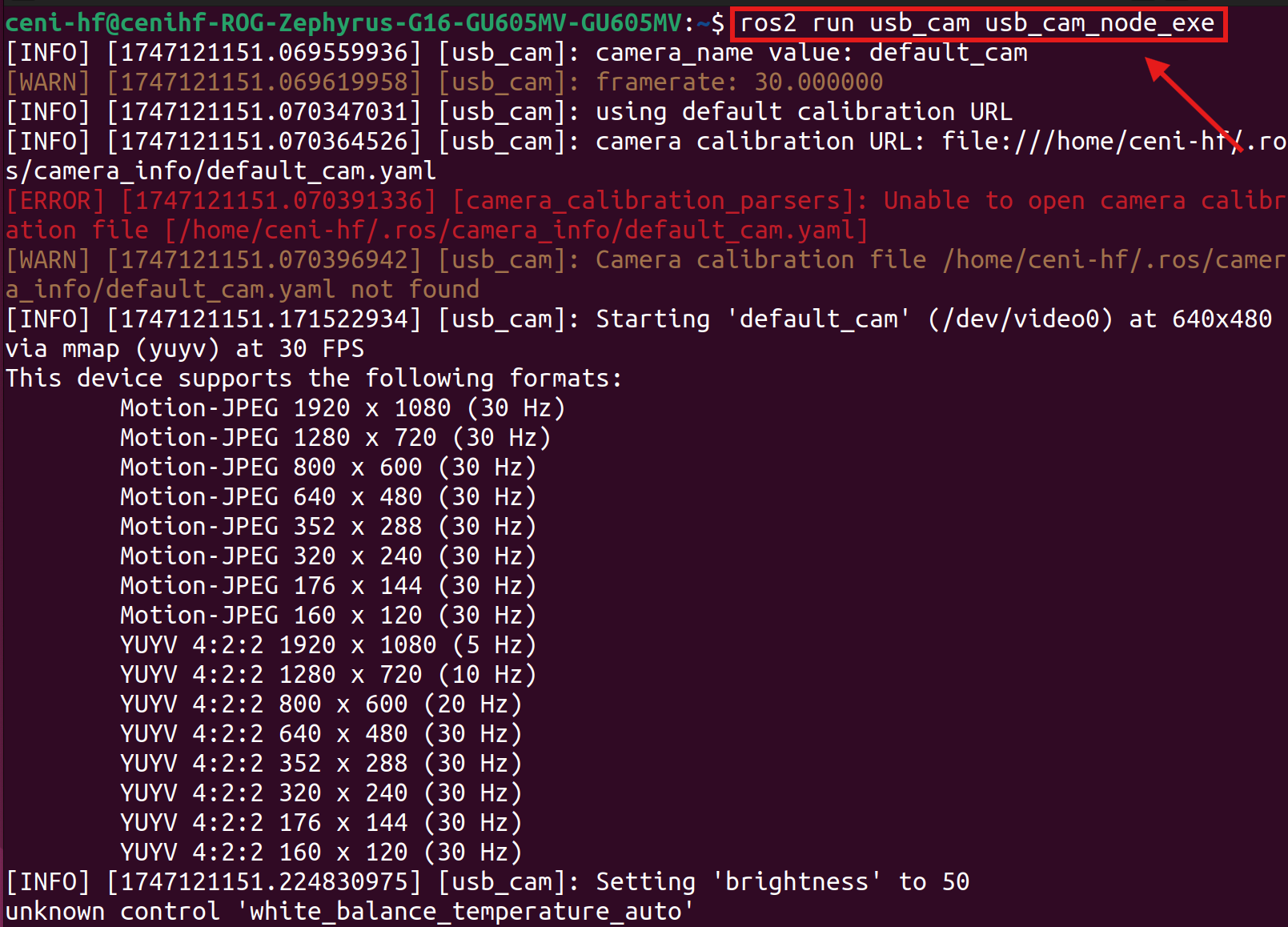
4.再打开一个终端
再次按下 Ctrl + Alt + T,再打开一个终端。
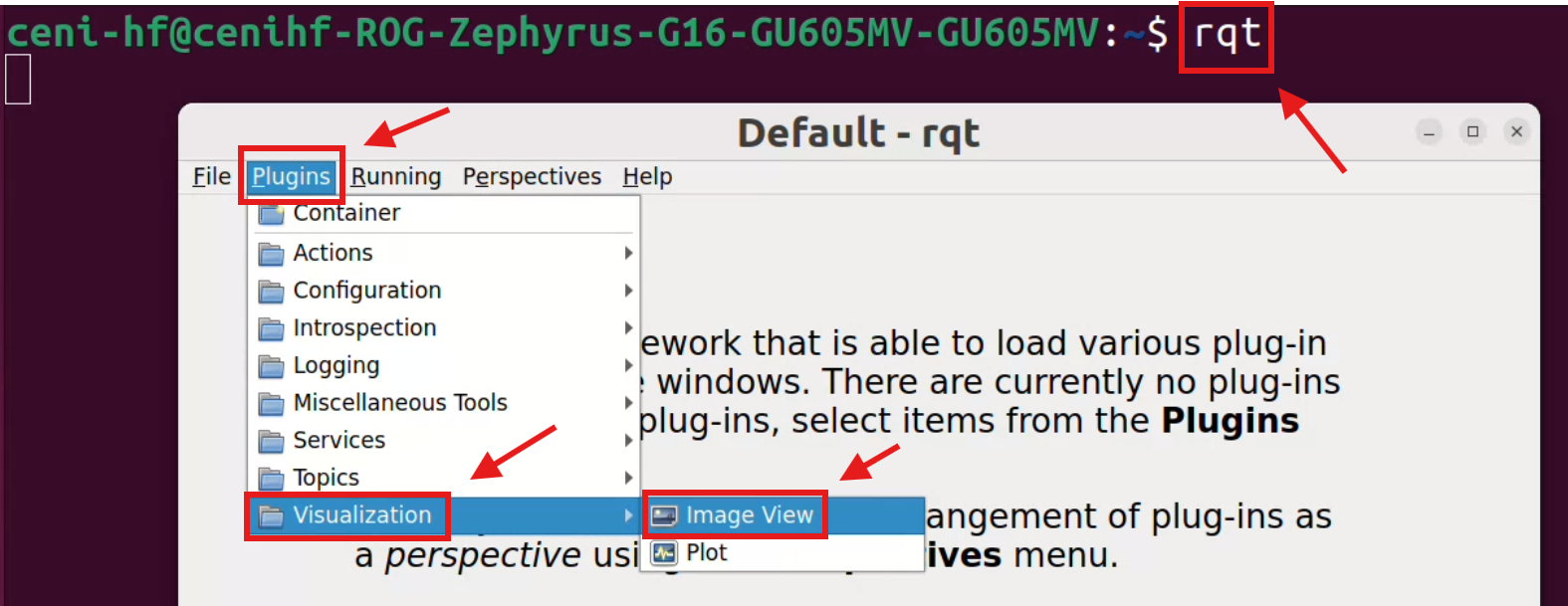
5.启动rqt查看图像
(1)方法一:点击窗口选项,打开图像话题
输入以下命令,并回车:
c
rqt这时回跳出弹窗,按下图箭头指示,点击。
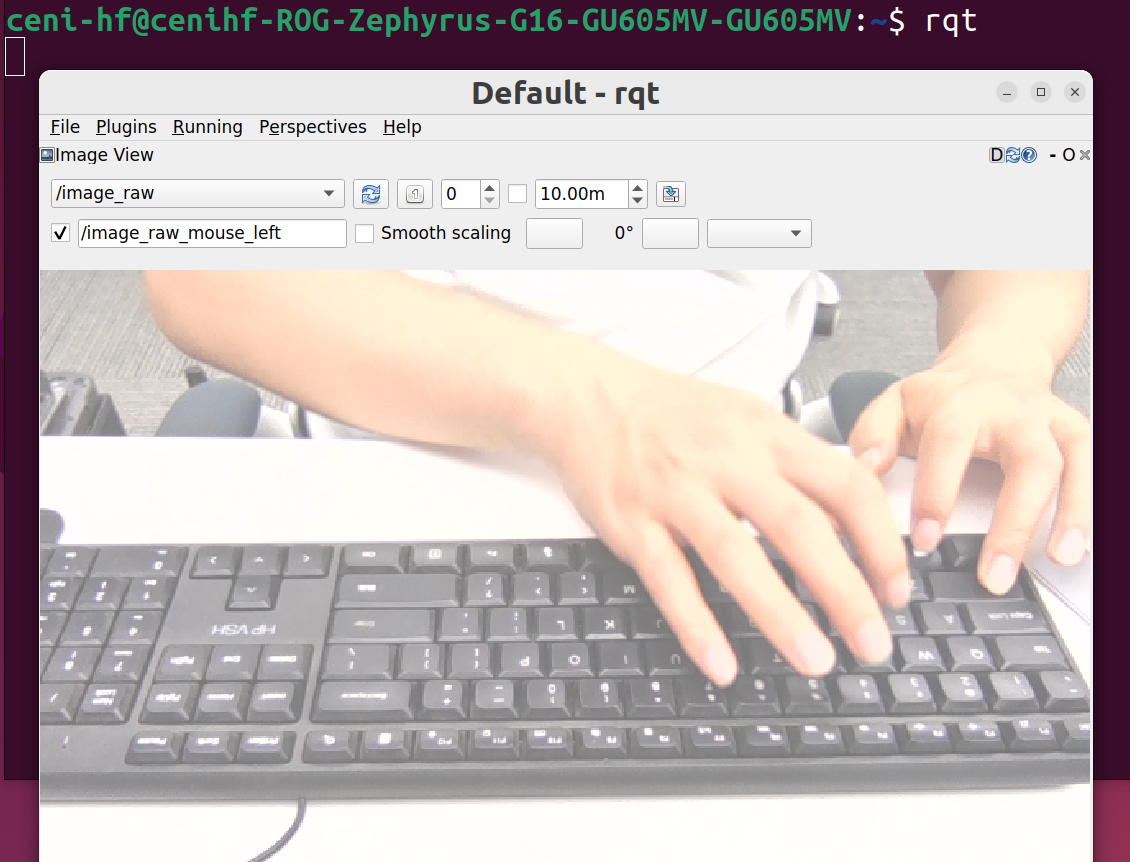
(2)方法二:使用命令行,直接打开图像话题
使用以下命令,即可直接打开图像话题
c
ros2 run rqt_image_view rqt_image_view二、获取USB相机图像
几天后补充
总结
以上就是今天要讲的所有内容啦。希望对大家有所帮助,接下来,我还会分享更多的文章,希望可以帮助到大家。