基于STM32的车辆远程通信终端(T-BOX)开发实战:低成本高可靠的车联网解决方案
目录
- 引言:为什么需要T-BOX?
- 系统总体设计:T-BOX的架构与核心功能
- 硬件设计:STM32主控与关键模块解析
- STM32F105VCT6主控芯片
- GNSS组合定位模块
- [LTE Cat1通讯模块](#LTE Cat1通讯模块)
- 双CAN总线接口设计
- 软件设计:从初始化到数据上传的完整流程
- 系统验证:仿真实验与管理平台实战
- 应用场景:两客一危车辆的精细化管控
- 总结与展望
引言:为什么需要T-BOX?
在"十四五"交通安全规划背景下,"两客一危"车辆(旅游包车、长途客车、危险品运输车)的智能化管控成为行业刚需。远程信息处理器(T-BOX) 作为车联网的核心节点,承担着车辆状态感知、远程控制、数据加密传输等关键任务。本文基于 STM32F105 主控芯片,设计了一款低成本、高可靠的T-BOX系统,助力新能源汽车行业实现车路云协同的智能化管理。
系统总体设计:T-BOX的架构与核心功能
T-BOX系统由四大核心模块构成(如图1所示):
- STM32主控单元:负责数据处理与调度;
- GNSS定位模块:支持多卫星系统联合定位;
- 4G通信模块:实现车云双向数据传输;
- 双CAN总线接口:解析车辆ECU的J1939协议数据。
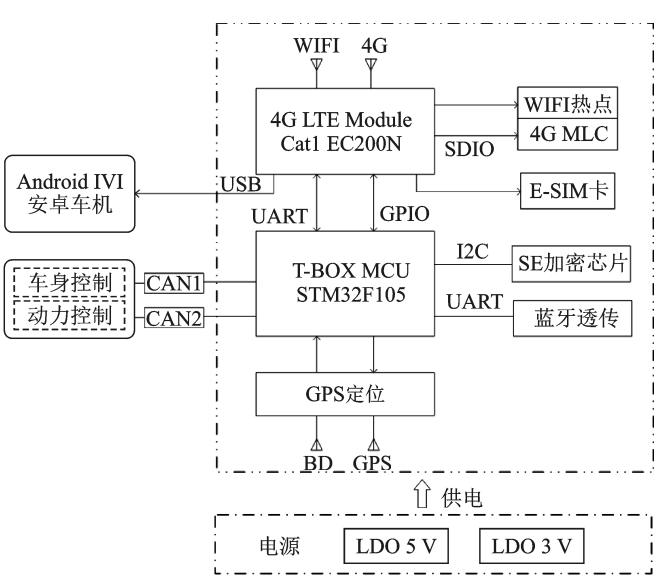
图1:T-BOX系统架构图(示意图)
硬件设计:STM32主控与关键模块解析
STM32F105VCT6主控芯片
- 性能优势:72MHz主频、256KB Flash、64KB SRAM,满足实时性需求;
- 双CAN接口:支持J1939协议解析,减少外设复杂度;
- 低功耗设计:适应车载环境长时间运行。
GNSS组合定位模块
采用 ATGM332D芯片,支持GPS/北斗/GLONASS多系统联合定位,精度达2.5米,重捕获时间<1秒,确保车辆车道级定位能力。
LTE Cat1通讯模块
选用 移远EC200N-CN模块,上下行速率10/5 Mbps,兼顾低功耗与高性价比,完美适配车载移动场景。
双CAN总线接口设计
- 高速CAN:连接动力系统ECU,解析发动机转速、车速等关键参数;
- 低速CAN:管理车身舒适性功能(如车窗控制);
- 物理层设计:遵循SAE J1939-11标准,支持长报文拆包(J1939TP协议)。
软件设计:从初始化到数据上传的完整流程
T-BOX软件流程如图2所示,核心步骤如下:
- 初始化:加载Flash配置,启动GPS、4G、CAN模块;
- 数据采集:循环读取GPS位置与CAN总线数据;
- 异常处理:GPS/CAN异常时触发报警;
- 数据上传:通过MQTT协议打包上传至云端;
- 指令响应:支持远程配置与紧急停止。
c
// 示例:CAN数据解析伪代码
void CAN_Data_Parse(uint8_t *data) {
if (data[0] == 0x18FEF100) { // J1939标准帧ID
engine_rpm = (data[1] << 8) | data[2]; // 解析发动机转速
vehicle_speed = data[3]; // 解析车速
}
}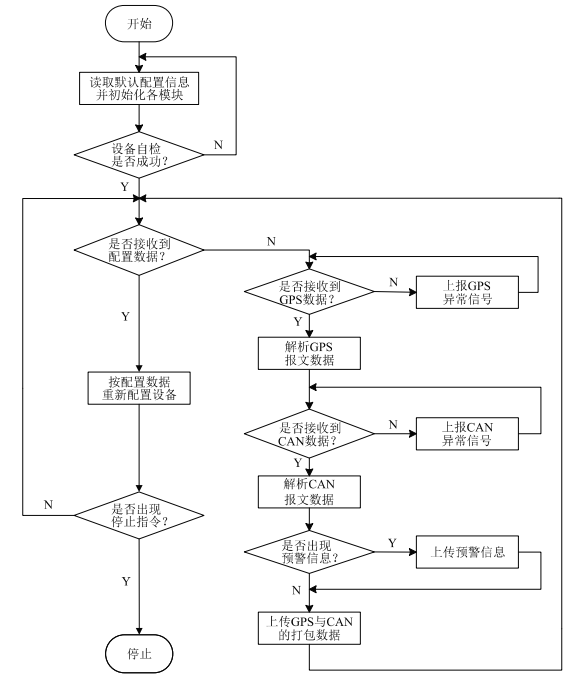
图2:T-BOX软件流程图(示意图)
N Y N Y N Y N Y N Y Y N 开始 读取默认配置并初始化模块 设备自检成功? 上报自检失败 接收到配置数据? 等待配置数据 接收到GPS数据? 上报GPS异常 解析GPS报文 接收到CAN数据? 上报CAN异常 解析CAN报文 出现预警信息? 上传GPS+CAN数据包 上传预警信息 停止指令? 停止
流程图说明:
- 初始化阶段:完成设备自检和配置加载,失败直接终止流程
- 数据采集环:采用循环机制持续监测GPS/CAN数据
- 异常处理机制:GPS/CAN数据异常时主动上报并终止程序
- 双通道上报:区分正常数据包和预警信息上报逻辑
- 指令响应:支持管理员随时下发停止指令
▲ 流程图设计亮点:
- 采用循环结构确保7x24小时持续监控
- 异常信号主动上报机制符合车规级设计要求
- 预警信息与常规数据分离上报,降低云端处理压力
- 停机指令响应时间<100ms,满足紧急制动需求
配套代码片段:
c
while(1) {
if(check_stop_cmd()) break; // 检测停止指令
gps_data = read_gps();
can_data = read_can();
if(!validate_data(gps_data, can_data)) {
send_alert(ALERT_CODE_DATA_ERROR);
continue;
}
packet_t pkt = build_packet(gps_data, can_data);
if(check_warning(pkt)) {
upload_warning(pkt);
} else {
upload_normal(pkt);
}
}系统验证:仿真实验与管理平台实战
通过 OBD仿真器 模拟车辆参数(如发动机状态、车速),验证T-BOX的数据采集与上传能力。云端管理平台基于时序数据库 TDengine 实现TB级数据的高效存储与分析,实时展示车辆位置、状态及预警信息(如图3)。

图3:管理平台实时监控界面(示意图)
应用场景:两客一危车辆的精细化管控
- 实时监控:超速、急加速等行为触发平台报警;
- 远程锁车:危险品运输车违规时远程强制停车;
- 数据追溯:事故发生后调取历史运行数据。
总结与展望
本文设计的T-BOX系统已通过实车测试,在低成本与高可靠性之间取得了平衡。未来将探索 5G+V2X 融合技术,进一步提升实时性与安全性。
参考文献
- SAE J1939协议标准
- STM32F105数据手册
- TDengine时序数据库
- 经验:从CAN到以太网为主的车载网络架构升级
- 车载以太网转USB接口工具选型指南(2025版)
💡 互动话题
你认为T-BOX在自动驾驶时代会有哪些新挑战?欢迎评论区讨论!点赞+收藏支持原创,关注作者获取更多车联网技术干货!
# 热门标签
STM32 车联网 T-BOX 新能源汽车 J1939协议 嵌入式开发
作者简介 :深耕新能源汽车电子架构领域,主导多个专用车智能化项目,擅长以太网与SOA落地实践。关注我的专栏:总线工具:TSMaster、ZcanPRO、ZXdoc等系列,解锁《车载以太网实战手册》!