介绍程序
1.流程分析
通过流程分析审查应用机器人自动化的可行性。
2.系统设计
选择合适的机器人(机械臂、夹持器、视觉系统等),并通过详细的任务分析设计最佳系统。
3.内部测试
建立内部测试平台并解决任何问题。
4.现场测试
现场设置并稳定系统。
5.维护和管理
进行系统现场实施后的维护管理。
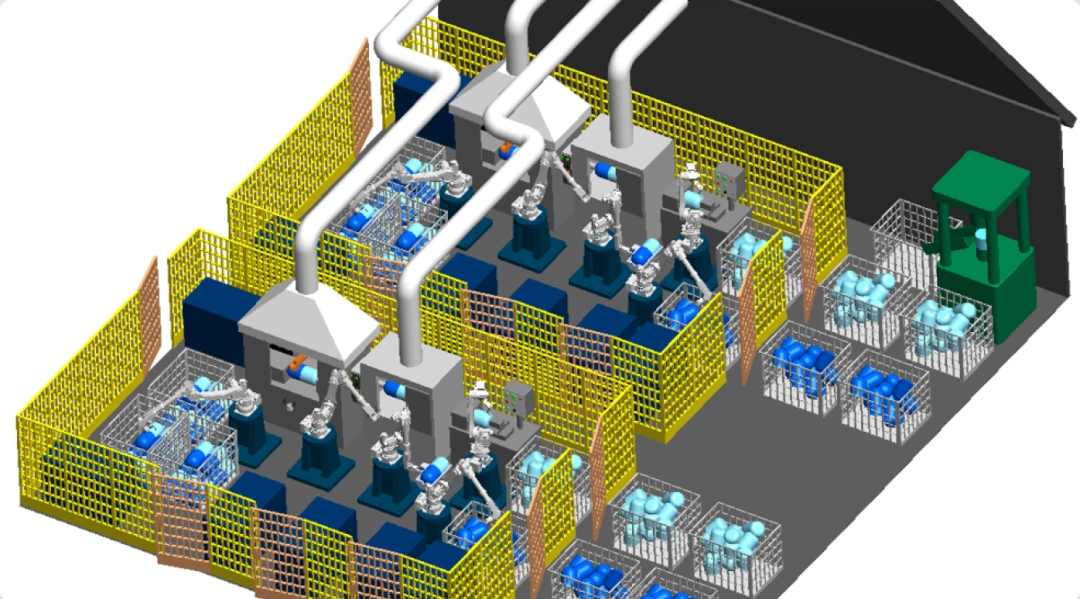
机器人拾取解决方案
机器人拾取、单件拾取、拾取和放置。DS-PICK-机器人拾取解决方案
这是一款先进的机器人拾取解决方案,专为运输和操控各种物体而设计。 该自动化搬运系统集成了DG-3F型号、机械臂和视觉系统,可根据预先学习的物体材质、形状和尺寸提供优化的抓取方法。非常适合需要高效拾取各种物品的箱体和单件的制造和物流行业。

机器人码垛解决方案
机器人自动化码垛系统。DS-PAL-机器人码垛解决方案
DS-PAL是一款机器人码垛解决方案,旨在高效运输和处理各种物体。该自动化搬运系统集成了DG-3F型号、机械臂和视觉系统,可根据预先学习的物体材质、形状和尺寸,提供优化的抓取方法。该系统非常适合制造和物流行业,在各种物品的箱体拾取和单件拾取等任务中表现出色。
