wire与reg理解,阻塞与非阻塞
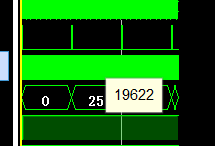
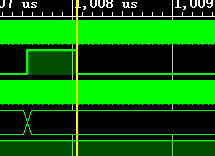
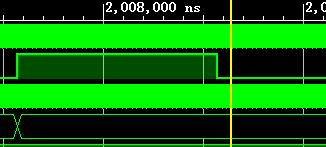
时序取值,时钟触发沿向左看
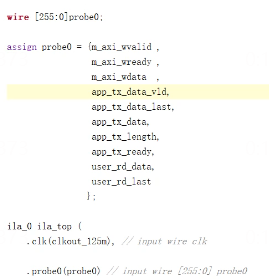
ip核/setup debug 添加 ila
一、ila使用小技巧
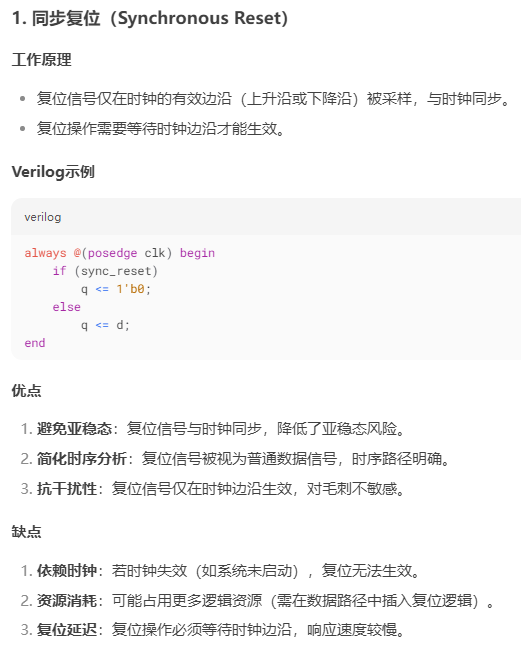
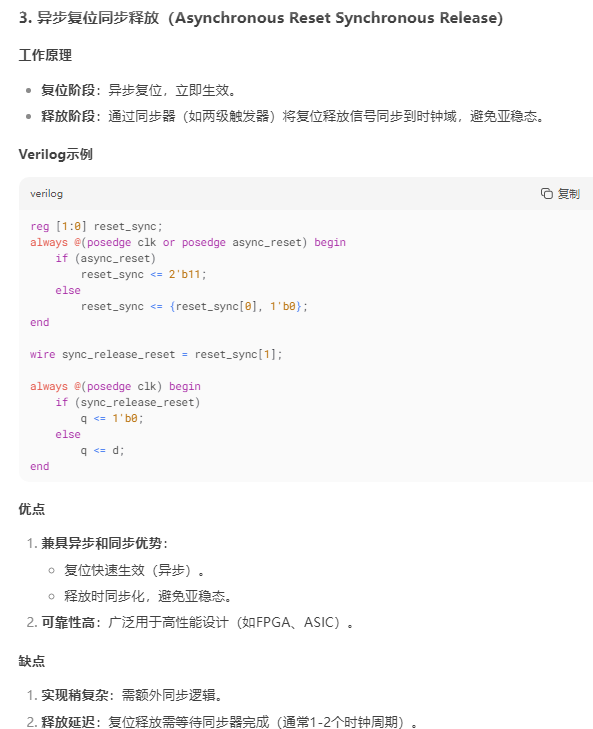
二、同步复位、异步复位和异步复位同步释放

设计复位设计,尽量使用 **异步复位同步释放;**尽管该方法仍然对毛刺敏感,但原本的毛刺复位信号也是一个不定态,无法得知该毛刺是否对工程产生负面影响,那么针对该毛刺,放大了之后更好便于处理问题。

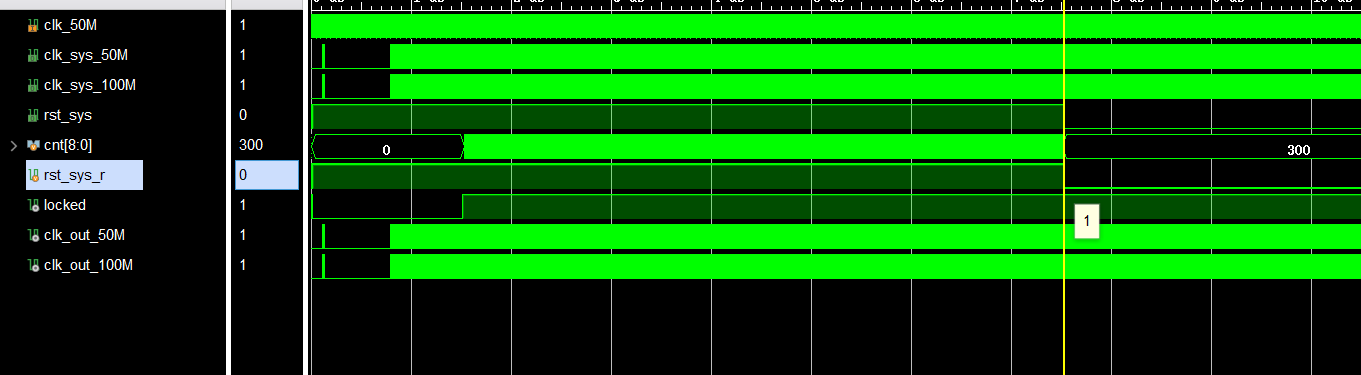
1.项目工程复位时钟产生:
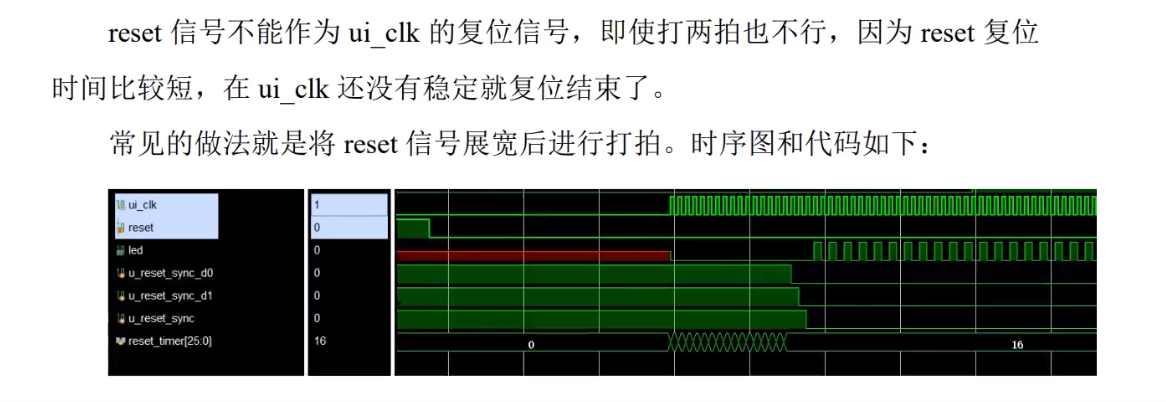
外部晶振时钟经过pll的ip核,通过locked信号,引入计数器cnt对复位信号进行展宽,以便后续的多时钟域进行打拍寄存。例如在后续的ddr设计中,在mig核使用同步复位时,现将复位进行展宽,在进行打两拍寄存,实现对ui_clk的同步
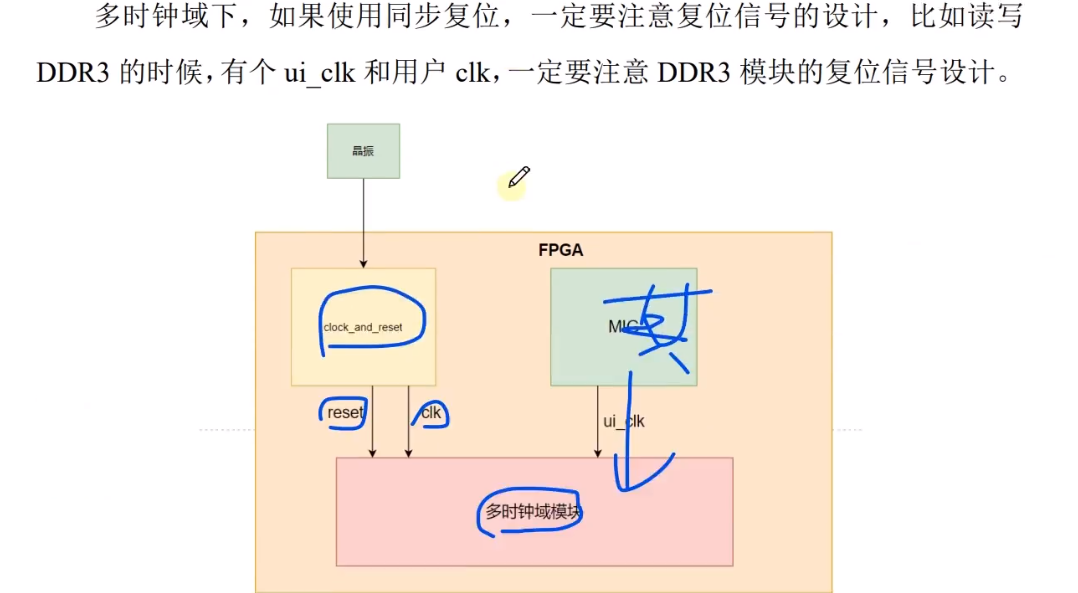
2.多时钟域下同步复位设计
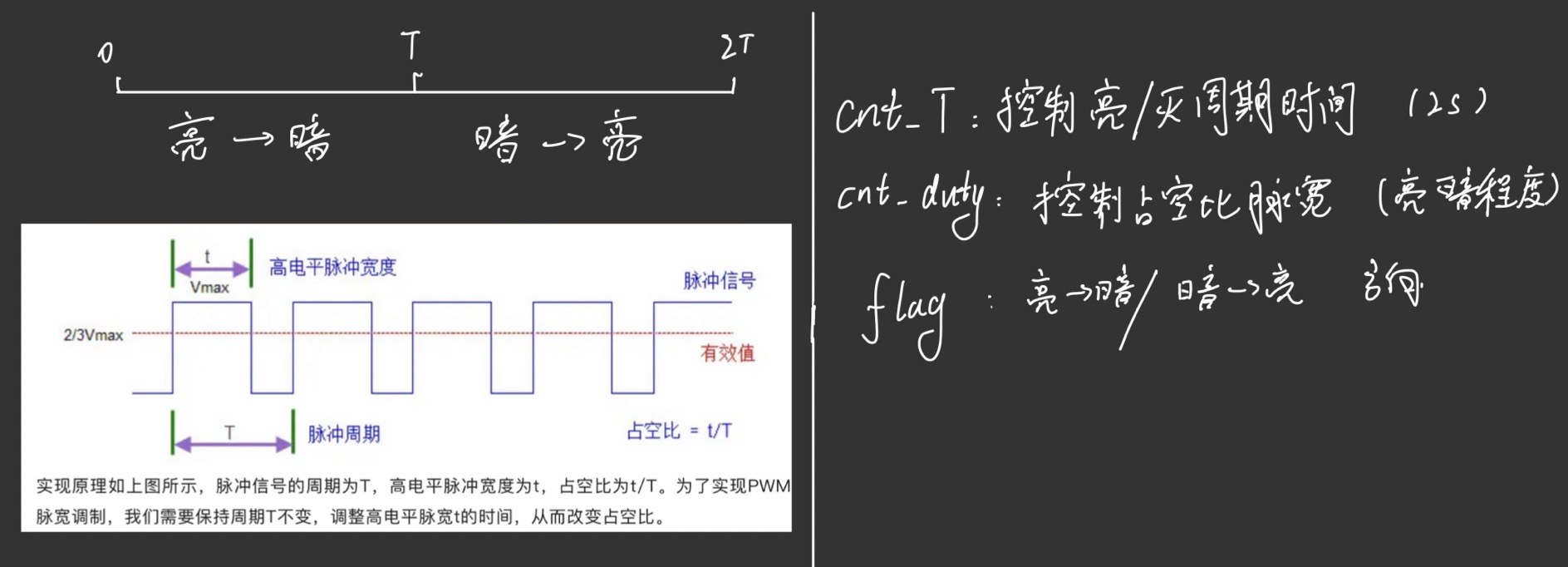
三、呼吸灯实验(PWM调制)
`timescale 1ns / 1ps
//
// Description:呼吸灯
//
module top(
input clk_50M ,
output led
);
reg [15:0] cnt_T;
reg [15:0] cnt_duty ;
reg flag ;
wire clk_sys_50M ;
wire clk_sys_100M ;
wire rst_sys ;
assign led = (cnt_duty > cnt_T) ? 'd1 : 'd0;
//时钟和复位
clock_and_reset u0(
.clk_50M (clk_50M ),
.clk_sys_50M (clk_sys_50M ),
.clk_sys_100M (clk_sys_100M),
.rst_sys (rst_sys )
);
always @(posedge clk_sys_50M or posedge rst_sys) begin
if(rst_sys)
cnt_T <= 'd0;
else if(cnt_T >= 'd50_000)
cnt_T <= 'd0;
else
cnt_T <= cnt_T + 'd1;
end
//默认上电复位从暗到亮
always @(posedge clk_sys_50M or posedge rst_sys) begin
if(rst_sys)begin
cnt_duty <= 'd0;
flag <= 'd1;
end
else if(cnt_T >= 'd50_000)begin
//flag = 1,亮度递增;佛增递减
if(flag)begin
if(cnt_duty == 'd50_000)
flag <= ~flag;
else
cnt_duty <= cnt_duty + 'd25;
end
else begin
if(cnt_duty == 'd0)
flag <= ~flag;
else
cnt_duty <= cnt_duty - 'd25;
end
end
else
flag <= flag;
end
endmodule