四轴飞行器(STM32)
想要更多项目私wo!!!
一、系统简介
四轴飞行器是一种通过四个旋翼产生的升力实现飞行的无人机,其核心控制原理基于欧拉角动力学模型。四轴飞行器通过改变四个电机的转速来实现六自由度控制(前后、左右、上下移动和俯仰、横滚、偏航旋转)
核心控制原理:
姿态感知:通过MPU6050/MPU9250等惯性测量单元获取飞行器的三轴加速度和三轴角速度数据
姿态解算:使用互补滤波或卡尔曼滤波算法将传感器数据转换为欧拉角(俯仰、横滚、偏航)
控制算法:采用串级PID控制,内环控制角速度,外环控制角度
电机混控:将控制量分配到四个电机,实现稳定飞行
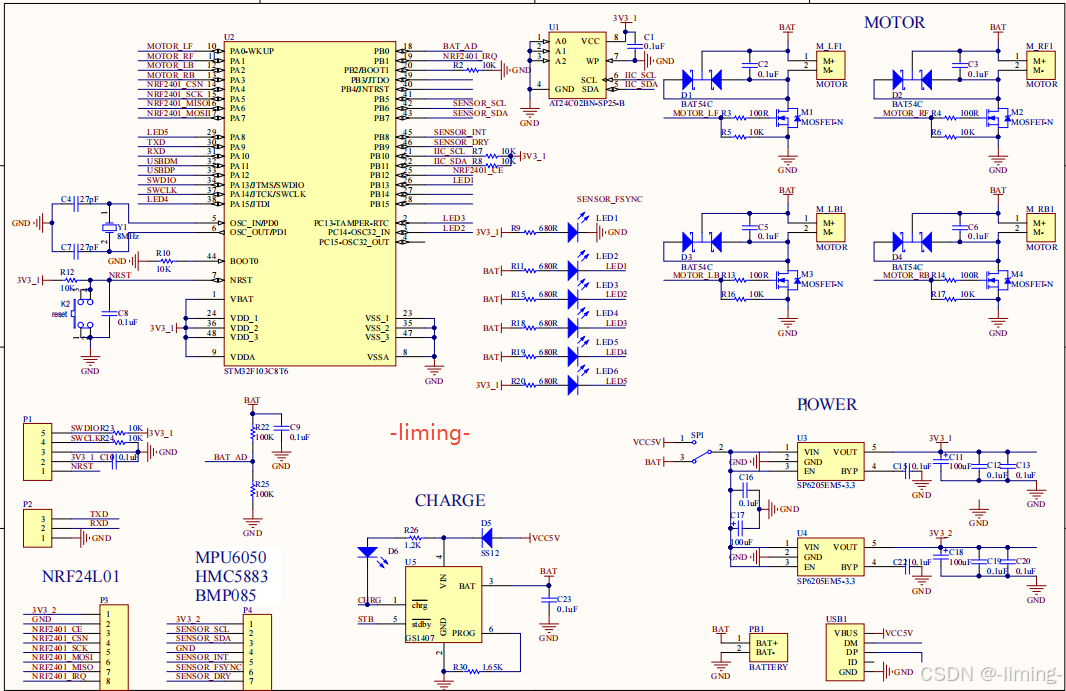
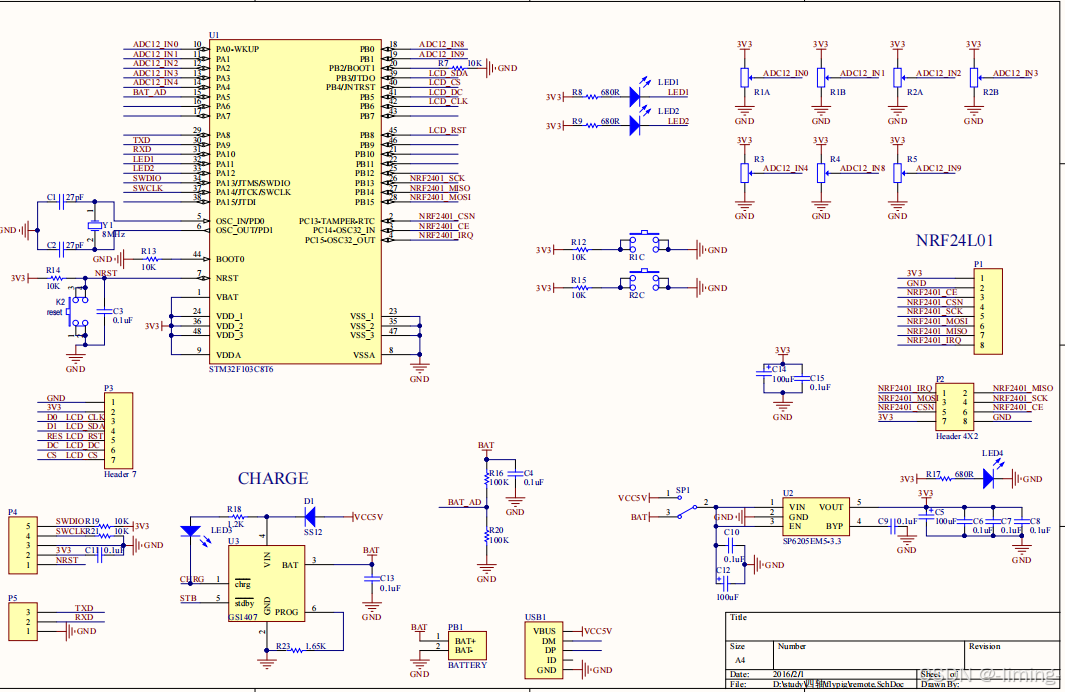
二、系统总体框图
飞控原理图
遥控器原理图
三、部分代码
cpp
#include "control.h"
#include "BSP.H"
#include "rc.h"
#include "imu.h"
#include "uart1.h"
PID PID_ROL,PID_PIT,PID_YAW;
u8 ARMED = 0;
extern vs16 QH,ZY,XZ;
float Get_MxMi(float num,float max,float min)
{
if(num>max)
return max;
else if(num<min)
return min;
else
return num;
}
void CONTROL(float rol_now, float pit_now, float yaw_now, float rol_tar, float pit_tar, float yaw_tar)
{ //当前姿态角,,,目标姿态角
u16 moto1=0,moto2=0,moto3=0,moto4=0;
vs16 throttle;
// u8 moto[8];
float rol = rol_tar + rol_now;
float pit = pit_tar + pit_now;
float yaw = yaw_tar + yaw_now;
throttle = Rc_Get.THROTTLE - 1000; //1000<遥控油门值<2000
if(throttle<0) throttle=0;
PID_ROL.IMAX = throttle/10; //积分限幅,积分值不超过当前油门值的一半
PID_ROL.IMAX = Get_MxMi(PID_ROL.IMAX,1000,0); //限制积分结果为,0到1000
PID_PIT.IMAX = PID_ROL.IMAX;
PID_ROL.pout = PID_ROL.P * rol;
PID_PIT.pout = PID_PIT.P * pit;
//、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
/0.1 0.1 30 30
if(rol_tar*rol_tar<1 && pit_tar*pit_tar<1 && rol_now*rol_now<100 && pit_now*pit_now<100 && throttle>300)
{ //防止角度大了,积分超调//目标姿态角水平,姿态角几乎水平,油门值不太低
PID_ROL.iout += PID_ROL.I * rol;
PID_PIT.iout += PID_PIT.I * pit;
PID_ROL.iout = Get_MxMi(PID_ROL.iout,PID_ROL.IMAX,-PID_ROL.IMAX); //对输出的积分限幅
PID_PIT.iout = Get_MxMi(PID_PIT.iout,PID_PIT.IMAX,-PID_PIT.IMAX);
}
else if(throttle<200)
{ //油门值较小时,积分项清零
PID_ROL.iout = 0;
PID_PIT.iout = 0;
}
//、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、、
// rc_roll_d = rol_tar - getlast_roll;
// getlast_roll = rol_tar;
// PID_ROL.dout = PID_ROL.D * (MPU6050_GYRO_LAST.X+rc_roll_d*300);//角速度+控制误差微分
//
// rc_pitch_d = pit_tar - getlast_pitch;
// getlast_pitch = pit_tar;
// PID_PIT.dout = PID_PIT.D * (MPU6050_GYRO_LAST.Y+rc_pitch_d*300);//角速度+控制误差微分
PID_ROL.dout = PID_ROL.D * MPU6050_GYRO_LAST.X;
PID_PIT.dout = PID_PIT.D * MPU6050_GYRO_LAST.Y;
/
PID_YAW.pout = PID_YAW.P * yaw;
//若 *yaw_now;锁尾模式!!!!
//若 *yaw; 非锁尾模式!!!!
/
vs16 yaw_d;
/
if(1480>Rc_Get.YAW || Rc_Get.YAW>1520) //给遥控加死区(偏航角的死区)
{
yaw_d = MPU6050_GYRO_LAST.Z + (Rc_Get.YAW-1500)*10; //用Z轴角速度及目标偏航角值进行四轴运动的预判
GYRO_I.Z = 0;
}
else
yaw_d = MPU6050_GYRO_LAST.Z;
PID_YAW.dout = PID_YAW.D * yaw_d;
/
PID_ROL.OUT = PID_ROL.pout + PID_ROL.iout + PID_ROL.dout;
PID_PIT.OUT = PID_PIT.pout + PID_PIT.iout + PID_PIT.dout;
PID_YAW.OUT = PID_YAW.pout + PID_YAW.iout + PID_YAW.dout;
if(throttle>200) //油门值大于200才起飞 (遥控油门值大于1200)
{
// moto1 = throttle - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;
// moto2 = throttle - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;
// moto3 = throttle + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;
// moto4 = throttle + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT;
// moto4 = throttle - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;
// moto3 = throttle - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;
// moto2 = throttle + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;
// moto1 = throttle + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT;
// moto1 = throttle - 25 + QH + ZY - XZ - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;
// moto2 = throttle - 25 + QH - ZY + XZ - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;
// moto3 = throttle - 25 - QH + ZY + XZ + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;
// moto4 = throttle + 75 - QH - ZY - XZ + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT;
moto4 = throttle + QH + ZY - XZ - PID_ROL.OUT - PID_PIT.OUT + PID_YAW.OUT;
moto3 = throttle + QH - ZY + XZ - PID_ROL.OUT + PID_PIT.OUT - PID_YAW.OUT;
moto2 = throttle - QH + ZY + XZ + PID_ROL.OUT - PID_PIT.OUT - PID_YAW.OUT;
moto1 = throttle - QH - ZY - XZ + PID_ROL.OUT + PID_PIT.OUT + PID_YAW.OUT;
// moto1 = throttle;
// moto2 = throttle;
// moto3 = throttle;
// moto4 = throttle;
}
else
{
moto1 = 0;
moto2 = 0;
moto3 = 0;
moto4 = 0;
}
// moto[1] = moto1 & 0xFF;
// moto[0] = (moto1>>8) & 0xFF;
// moto[3] = moto2 & 0xFF;
// moto[2] = (moto2>>8) & 0xFF;
// moto[5] = moto3 & 0xFF;
// moto[4] = (moto3>>8) & 0xFF;
// moto[7] = moto4 & 0xFF;
// moto[6] = (moto4>>8) & 0xFF;
//Uart1_Send_Buf(moto,8);
if(ARMED) Moto_PwmRflash(moto1,moto2,moto3,moto4); //未解锁则空心杯不转 ARMED=1则解锁
else Moto_PwmRflash(0,0,0,0);
}