🎯 使用 OpenCV 实现 ArUco 码识别与坐标轴绘制(含Python源码)
Aruco 是一种广泛用于机器人、增强现实(AR)和相机标定的方形标记系统。本文将带你一步一步使用 Python + OpenCV 实现图像中多个 ArUco 码的检测与坐标轴显示,最终实现"识别 + 姿态估计 + 坐标系可视化"的完整功能。
🧰 准备工作
首先,确保你安装了 OpenCV 的完整版本(含 aruco 模块):
bash
pip install opencv-python opencv-contrib-python📷 相机内参与畸变参数
要绘制每个 ArUco 码的坐标轴,我们必须知道相机的内参和畸变参数。
示例内参(请替换为你自己的标定结果):
python
camera_matrix = np.array([
[800, 0, 320],
[0, 800, 240],
[0, 0, 1]
], dtype=np.float32)
dist_coeffs = np.zeros((5, 1)) # 假设无畸变📌 注:真实使用中建议通过 OpenCV 标定获得准确的相机参数,否则坐标轴可能会显示错误。
🧪 ArUco 码识别与坐标系绘制代码
python
import cv2
import cv2.aruco as aruco
import numpy as np
# 读取图像
image = cv2.imread('your_image.jpg') # 替换为你的图像路径
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 加载 ArUco 字典和检测参数
aruco_dict = aruco.Dictionary_get(aruco.DICT_6X6_250)
parameters = aruco.DetectorParameters_create()
# 检测 ArUco 标记
corners, ids, rejected = aruco.detectMarkers(gray, aruco_dict, parameters=parameters)
# 相机参数(需根据你自己相机情况修改)
camera_matrix = np.array([
[800, 0, 320],
[0, 800, 240],
[0, 0, 1]
], dtype=np.float32)
dist_coeffs = np.zeros((5, 1)) # 简化处理,假设无畸变
# 设置坐标轴长度(单位视实际情况而定)
axis_length = 0.05
if ids is not None:
# 绘制检测到的 ArUco 边框与 ID
aruco.drawDetectedMarkers(image, corners, ids)
# 遍历每个检测到的 ArUco 码,估计姿态并绘制坐标轴
for i in range(len(ids)):
rvec, tvec, _ = aruco.estimatePoseSingleMarkers(corners[i], 0.05, camera_matrix, dist_coeffs)
aruco.drawAxis(image, camera_matrix, dist_coeffs, rvec, tvec, axis_length)
print("Detected ArUco IDs:", ids.flatten())
else:
print("No ArUco markers detected.")
# 显示结果图像
cv2.imshow("Aruco Marker with Axes", image)
cv2.waitKey(0)
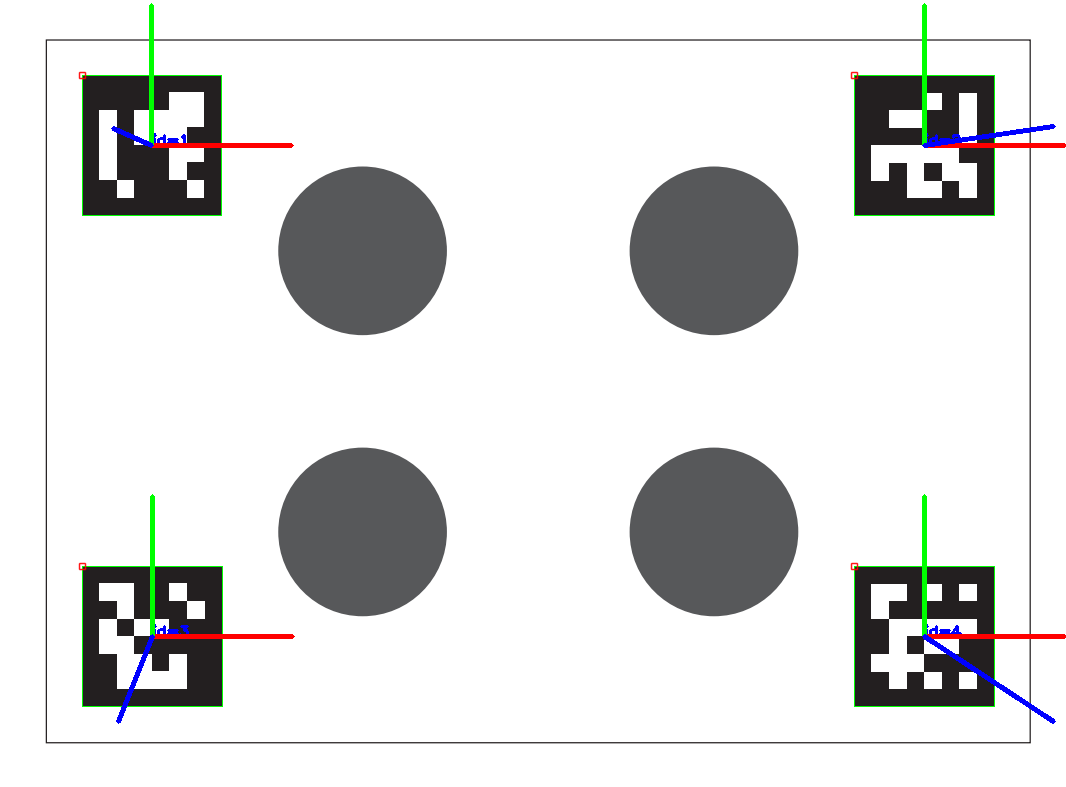
cv2.destroyAllWindows()🔍 运行效果
运行后你会看到每个 ArUco 码不仅被识别并绘制出边框,还会有一个三维坐标轴覆盖在上面:
- 红色:X 轴
- 绿色:Y 轴
- 蓝色:Z 轴(垂直于平面)
这对于调试机器人视觉系统或验证相机姿态估计非常有用。
🧠 常见问题
❓ 没有检测到 ArUco 码?
- 检查图像中是否清晰可见 ArUco 码。
- 确保使用了正确的字典(如:
DICT_6X6_250)。 - 尝试增加图像对比度或使用高分辨率图像。
❓ 坐标轴显示不对?
- 检查相机内参是否正确。
- 确保 ArUco 实际尺寸与你设置的一致(代码中
0.05代表码的边长是 5cm)。
📘 总结
通过本文你已经学会了:
- 如何使用 OpenCV 检测 ArUco 码
- 如何绘制检测结果和每个码的姿态坐标轴
- 如何利用相机内参进行精确的三维可视化