IIC和SPI的对比
- IIC是半双工的通信,无法同时收发信息;SPI是全双工通讯,可以同时收发信息;
- IIC的通讯协议较复杂,而SPI通讯协议较简单;
- IIC需要通过地址选择从机,而SPI只主要一个引脚即可选中从机;
- IIC的通讯速率一般是100kH左右,而SPI可达50MHz;
- IIC的通讯线较少,而SPI需要较多。
SPI的介绍
什么是SPI ?
SPI是串行外设接口(Serial Peripheral Interface) 的缩写,是一种高速 全双工 同步 的通信总线,并且在芯片上只有四个引脚,同时PCB布线上节省空间,比较方便,正是出于这种简单易用的特性,越来越多的芯片集成了这种通信协议,比如 AT91RM9200 。
SPI的物理架构
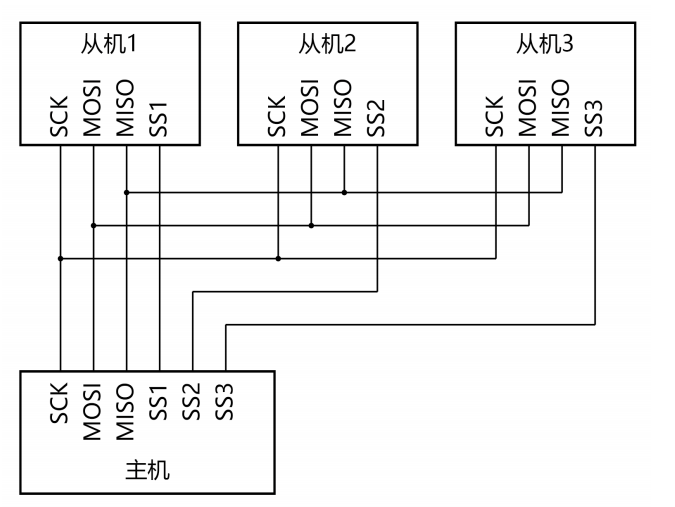
SPI总线包含4个通讯线,分别是 SS , MISO , MOSI , SCL 。他们的 作用 如下:
- MISO -- Master Input Slave Output,主设备数据输入,从设备数据输出
- MOSI -- Master Output Slave Input,主设备数据输出,从设备数据输入
- SCK -- Serial Clock,时钟信号,由主设备产生
- CS -- Chip Select,片选信号,由主设备控制
STM32F1 系列芯片有 3 个SPI 接口。
SPI工作原理
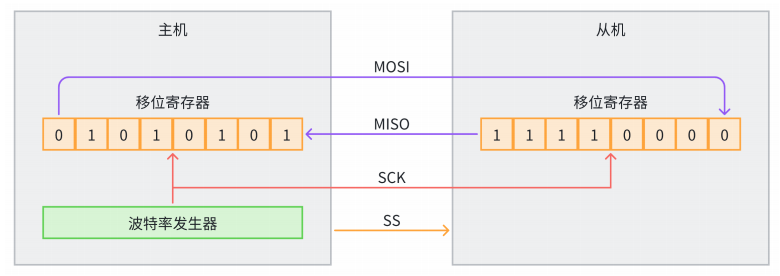
上述中是高位先行;
习惯上利用0XFF将从机上的数据交换出来。
SPI通信只有主模式和从模式,没有明确的读和写操作之分。实际上,外设的写操作和读操作是同步完成的。在SPI通信中,发送一个数据必然会收到一个数据;如果要接收一个数据,就必须先发送一个数据。
如果只进行写操作,主机可以忽略从设备传输过来的字节,因为主机不需要接收数据。
如果主机要读取从设备的一个字节,那么主机必须发送一个空字节来引发从设备的传输。
说明:(狸猫换太子)
上述中主机和从机 高位先行,主机移位寄存器中,高位移出,其余整体向左移一位;同时,从机中的高位移到主机的低位中的空位,从机其余位向左移一位;主机的高位放到从机移位寄存器中空出来的低位。通过波特率发生器:一个时钟信号主从机中数据交换一位,8个时钟信号后,数据全部交换完成。
具体流程:
SPI 通信中,主机和从机都有一个串行移位寄存器。主机通过向自己的 SPI 串行寄存器写入一个字节来发起传输。
- 首先,拉低相应的 SS 信号线,表示与特定的从机进行通信。
- 主机通过发送 SCLK 时钟信号告诉从机进行数据的读写操作。
- 注意,SCLK 时钟信号可以是低电平有效或高电平有效,因为SPI有不同的模式(下文将介绍)。
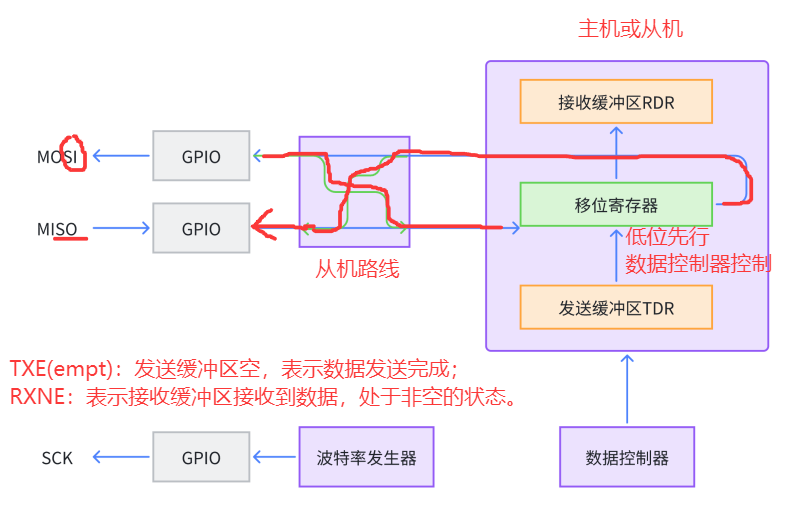
- 主机将要发送的数据写入发送数据缓冲区,然后通过移位寄存器逐位地将数据传输给从机的串行移位寄存器,使用 MOSI 信号线进行传输。同时,从机的 MOSI 接口接收到的数据也经过移位寄存器一位一位地移到接收缓冲区。
- 从机也通过 MISO 信号线将自己串行移位寄存器中的内容返回给主机。同时,从机通过MOSI 信号线接收主机发送的数据。这样,两个移位寄存器中的内容就被交换。
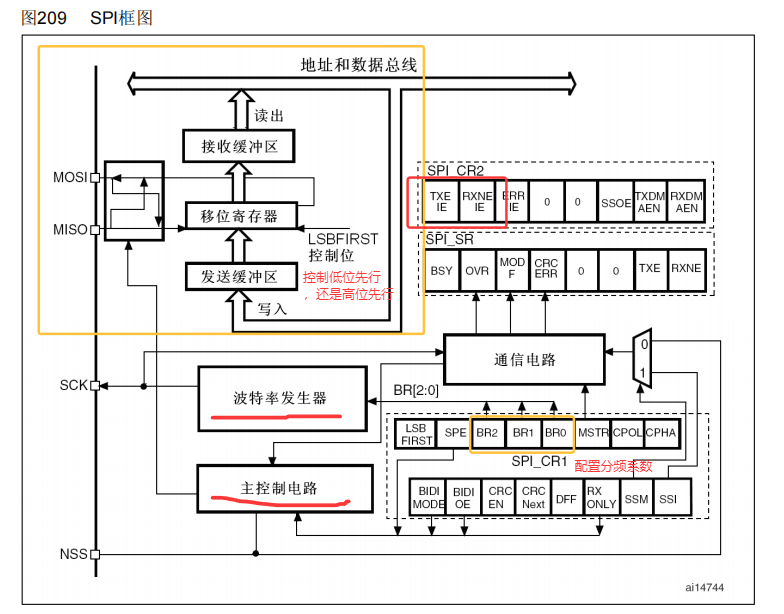
- 框图(参考手册):
- 简图:
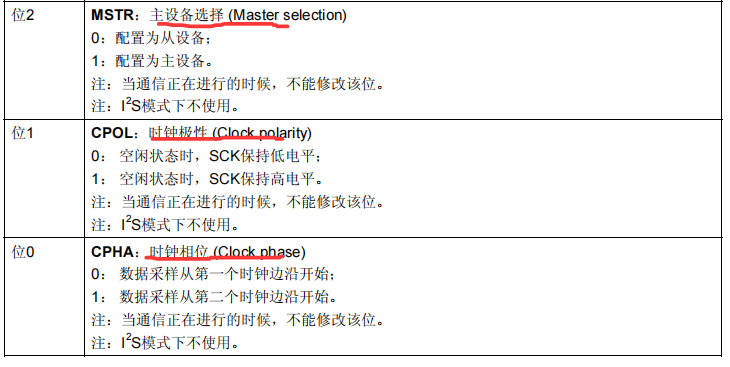
SPI工作模式
时钟极性(CPOL)
没有数据传输时时钟线SCL的空闲状态电平
0 :SCK在空闲状态保持低电平
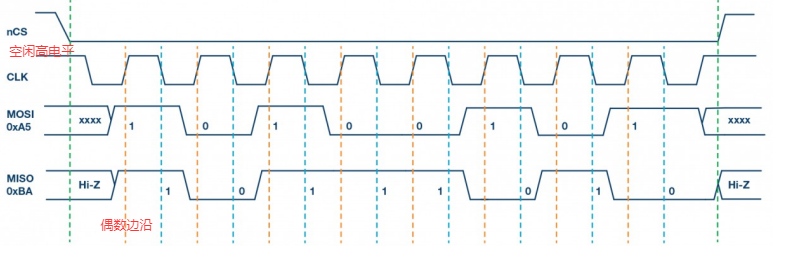
1 :SCK在空闲状态保持高电平
时钟相位(CPHA)
时钟线(SCK)在第几个时钟边沿采样数据
0 :SCK在第一个(奇数)边沿进行数据位采样,数据在第一个时钟边沿被锁存;
1 :SCK的第二个(偶数)边沿进行数据位采样,数据在第二个时钟边沿被锁村。
|------------------|----------|----------|------------------|----------|----------|
| SPI 工作模式 | CPOL | CPHA | SCL 空闲状态 | 采样边沿 | 采样时刻 |
| 0 | 0 | 0 | 低电平 | 上升沿 | 奇数边沿 |
| 1 | 0 | 1 | 低电平 | 下降沿 | 偶数边沿 |
| 2 | 1 | 0 | 高电平 | 下降沿 | 奇数边沿 |
| 3 | 1 | 1 | 高电平 | 上升沿 | 偶数边沿 |
[SPI的工作模式(开始和采样)]
注:红色字体是常用的:模式0和模式3
时序图
- 模式0时序图:
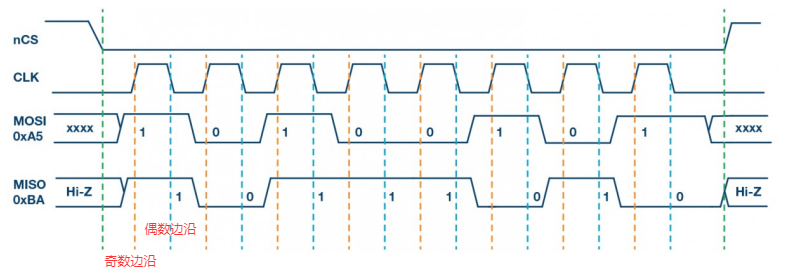
- 模式3时序图 :
STM32F103板上SPI的引脚
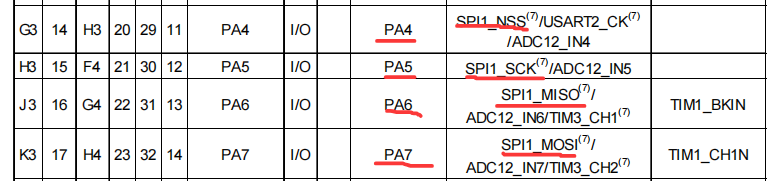
- SPI1引脚:
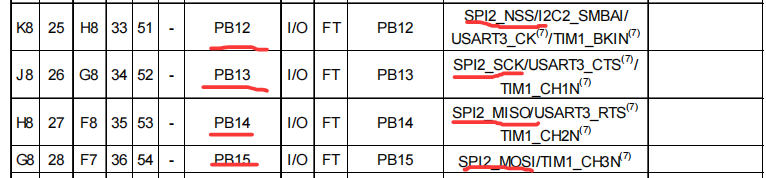
- SPI2引脚:
-
SP3引脚
-
STM32F1系列根据Flash和RAM容量分为不同型号:
-
低/中容量(Low/Medium-density) :如STM32F103C8T6(64KB Flash),仅支持SPI1 和SPI2。
-
高容量(High-density) :如STM32F103ZE(512KB Flash),额外支持SPI3。
-
-
SPI3是高容量型号的专属外设,STM32F103C8T6作为中容量型号,硬件上未集成SPI3模块。
SPI寄存器(控制、状态、数据)
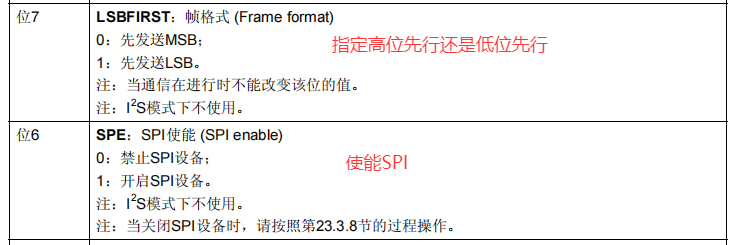
SPI控制寄存器1(SPI_CR1)(I2S模式下不使用)





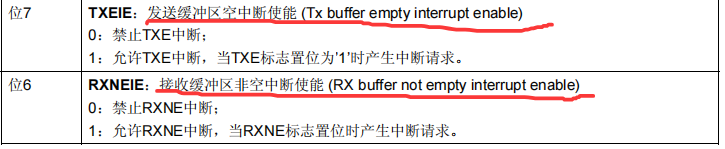
SPI控制寄存器2(SPI_CR2)

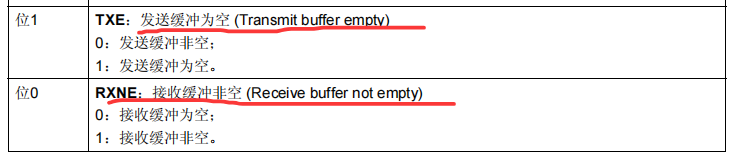
SPI状态寄存器(SPI_SR)

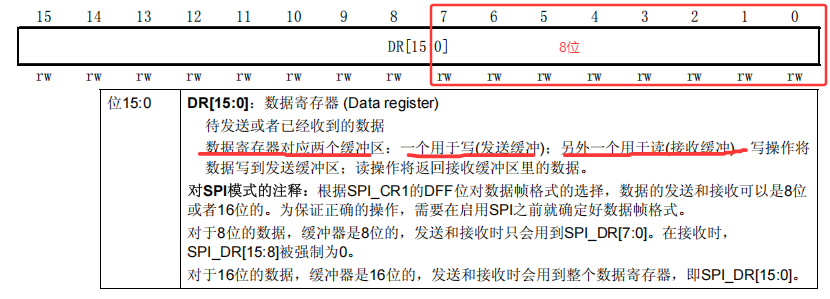
SPI数据寄存器(SPI_DR)
SPI的库函数(常用的有三个)
初始化SPI的函数:


数据发送的函数 :

数据接收的函数:

常用的是:既发送又接受的函数

模块:W25Q128存储器介绍
电脑保存数据的有RAM、ROM、FLASH (类似于硬盘,断电保存的数据不丢失)
W25Q128是华邦公司推出的一款容量为128M-bit(相当于 16M-byte) 的 SPI 接口的NOR Flash 芯片。
- NOR Flash :一种非易失性存储器,它可以在断电或掉电后仍然保持存储的数据,因此被广泛应用于长期数据存储。它具有容量大,可重复擦写、按"扇区/块"擦除的特性。Flash 是有一个物理特性:只能写 0 ,不能写 1,写 1 靠擦除。(读、改、写)

它还有很多不同容量的好兄弟:
| 型号 | 容量 |
|---|---|
| W25Q256 | 256M bits = 32M bytes |
| W25Q128 | 128M bits = 16M bytes |
| W25Q64 | 64M bits = 8M bytes |
| W25Q32 | 32M bits = 4M bytes |
| W25Q16 | 16M bits = 2M bytes |
| W25Q80 | 8M bits = 1M bytes |
W25Q128模块参数及引脚介绍
参数:
- 产品容量:128M-bit(16M-byte)
- 时钟频率:<=104MHz
- 工作电压:2.7V ~ 3.6V
- 工作温度:-40℃ ~ +85℃
- 支持 SPI 接口
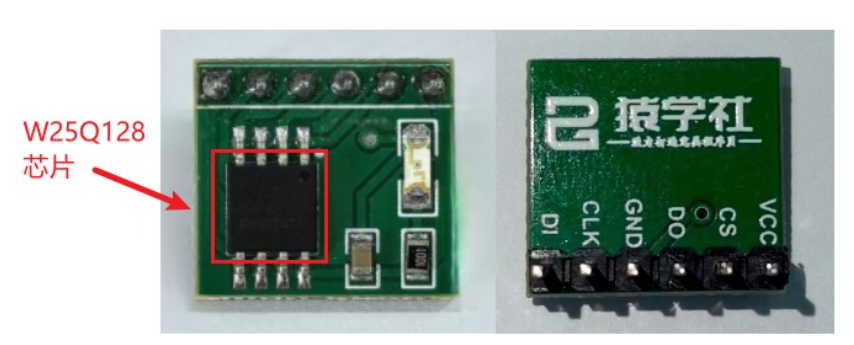
参考接线:
| W25Q128 | STM32 | 备注 |
|---|---|---|
| VCC | 3.3(5.5v会烧掉) | 电源正极 |
| CS | A4 / B12 | 片选信号 |
| DO | A6 / B14 | 输出 |
| GND | G | 电源负极 |
| CLK | A5 / B13 | 时钟信号 |
| DI | A7 / B15 | 输入 |
W25Q128存储架构
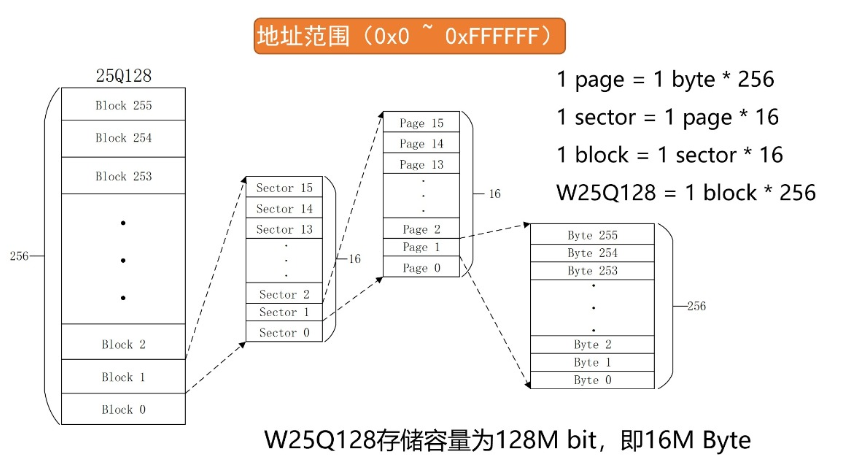
W25Q128 将 16M 的容量分为 256 个块(block),每块 64K 字节;每块分为 16 个扇区(sector),一扇区 4K 字节;每扇区分为 16 个页(page),一页 256 字节。
这里不好理解的话,和书进行类比:
|-------------|-----------------------------|--------------------|-----------------------|---------------|
| W25Q128 | 256 个块(block):每块 64K 字节 | 每块16 个扇区:4K 字节 | 每扇区分为 16 个页(page) | 一页 256 字节 |
| 书 | 256 章: 每章64K字 | 每章 16小节:4K 字 | 每一小节有16 页 | 一页 256 字 |
地址范围:
128M-bit = 16M-byte = 16 x 2^10K-byte = 16 x 2^10 x 2^10 byte = 2^24 byte = 16,777,216 个字节。
上述中,一个字节代表一个地址,总共是24位的地址,将2^24的字节数量转化成16进制就是0xFFF FFF。所以,地址范围(0x0~0xFFF FFF)。
W25Q128 的最小擦除单位 为一个扇区 ,也就是每次必须擦除 4K 个字节 。这样我们需要给 W25Q128 开辟一个至少 4K 的缓存区。
W25Q128常用指令
| 指令(HEX) | 名称 | 作用 |
|---|---|---|
| 0x06 | 写使能 | 写入数据/擦除之前,必须先发送该指令 |
| 0x05 | 读 SR1 | 判定 FLASH 是否处于空闲状态,擦除用 |
| 0x03 | 读数据 | 读取数据 |
| 0x02 | 页写 | 写入数据,最多写256字节 |
| 0x20 | 扇区擦除 | 扇区擦除指令,最小擦除单位 |
具体工作时序如下:
- 写使能 (06H)
执行页写,扇区擦除,块擦除,片擦除,写状态寄存器等指令前,需要写使能。
拉低 CS 片选 → 发送 06H → 拉高 CS 片选
- 读SR1(05H)
拉低 CS 片选 → 发送 05H → 返回SR1的值 → 拉高 CS 片选
- 读数据(03H)
拉低 CS 片选 → 发送 03H → 发送24位地址 (封装函数)→ 读取数据(1~n)→ 拉高 CS 片选
- 页写 (02H)
页写命令最多可以向FLASH传输256个字节的数据。
写使能->拉低 CS 片选 → 发送 02H → 发送24位地址 → 发送数据(1~n)→ 拉高 CS 片选
- 扇区擦除(20H)
写入数据前,检查内存空间是否全部都是0xFF ,不满足需擦除。
写使能- 等待空闲-拉低 CS 片选 → 发送擦除 20H→ 发送24位地址 → 拉高 CS 片选-等待空闲
W25Q128状态寄存器
W25Q128 一共有 3 个状态寄存器,它们的作用是跟踪芯片的状态。
这里我们只介绍常用的状态寄存器 1:
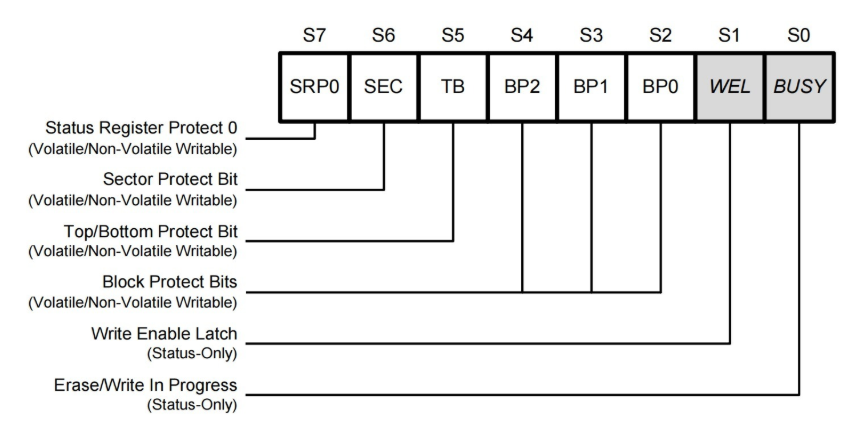
我们需要记住的是在状态寄存器 1 中:
BUSY: 指示当前的状态,0 表示空闲 ;1 表示忙碌。
WEL: 写使能锁定,为 1 时,可以操作页/扇区/块;为 0 时,写禁止。
小实验1:W25Q128的实验(封装SPI接口)
实验目的:
读写W25Q128
硬件清单:
W25Q128、开发板、ST-Link、USB转TTL
硬件接线:
|-----------|-------------|
| STM32 | W25Q128 |
| PA4 | CS |
| PA5 | CLK |
| PA6 | DO |
| PA7 | DI |
| 3V3 | VCC |
| GND | GND |
w25q128.c文件代码:
流程:
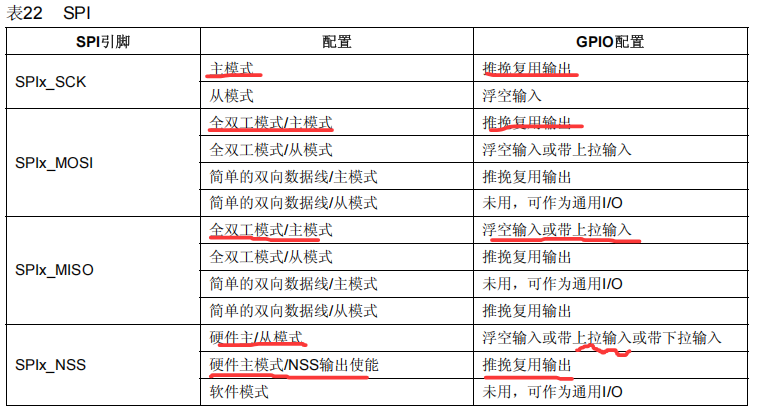
- 初始化SPI的函数;
- 初始化SPI各个引脚的函数;注意各引脚要求的输入输出模式。
- 封装一个发送和接受一个字节的函数:利用HAL_SPI_TransmitRecive()函数实现。
cs
#include "w25q128.h"
SPI_HandleTypeDef spi_handle = {0};
void w25q128_spi_init(void){
spi_handle.Instance = SPI1;
spi_handle.Init.Mode = SPI_MODE_MASTER; //配置成主模式还是从模式
spi_handle.Init.Direction = SPI_DIRECTION_2LINES; //配置全双工还是半双工
spi_handle.Init.DataSize = SPI_DATASIZE_8BIT; //数据的长度:8bit
spi_handle.Init.CLKPolarity = SPI_POLARITY_LOW; //CPOL = 0
spi_handle.Init.CLKPhase = SPI_PHASE_1EDGE; //CPHA = 奇数边沿检测
spi_handle.Init.NSS = SPI_NSS_SOFT; //软件控制SS引脚配置
spi_handle.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256; //波特率分频 :256
spi_handle.Init.FirstBit = SPI_FIRSTBIT_MSB; //高位先行还是低位先行:高位先行
//下面这三个先不需要考虑
spi_handle.Init.TIMode = SPI_TIMODE_DISABLE;
spi_handle.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
spi_handle.Init.CRCPolynomial = 7;
HAL_SPI_Init(&spi_handle);
}
void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi){
if(hspi->Instance == SPI1){
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_SPI1_CLK_ENABLE();
GPIO_InitTypeDef gpio_initstruct;
//NSS引脚
gpio_initstruct.Pin = GPIO_PIN_4;
gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP;
gpio_initstruct.Pull = GPIO_PULLUP;
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA,&gpio_initstruct);
//SCL引脚和输出引脚
gpio_initstruct.Pin = GPIO_PIN_5 |GPIO_PIN_7;
gpio_initstruct.Mode = GPIO_MODE_AF_PP;
HAL_GPIO_Init(GPIOA,&gpio_initstruct);
//输入引脚
gpio_initstruct.Pin = GPIO_PIN_6;
gpio_initstruct.Mode = GPIO_MODE_INPUT;
HAL_GPIO_Init(GPIOA,&gpio_initstruct);
}
}
uint8_t w25q128_spi_swap_byte(uint8_t data){
uint8_t recv_data = 0;
HAL_SPI_TransmitReceive(&spi_handle,&data, &recv_data,1,1000); ///size:尺寸代表是多少个字节
return recv_data;
}小实验2:封装读取芯片ID接口
文件代码:(在实验1的基础上添加)
- 发送的指令:
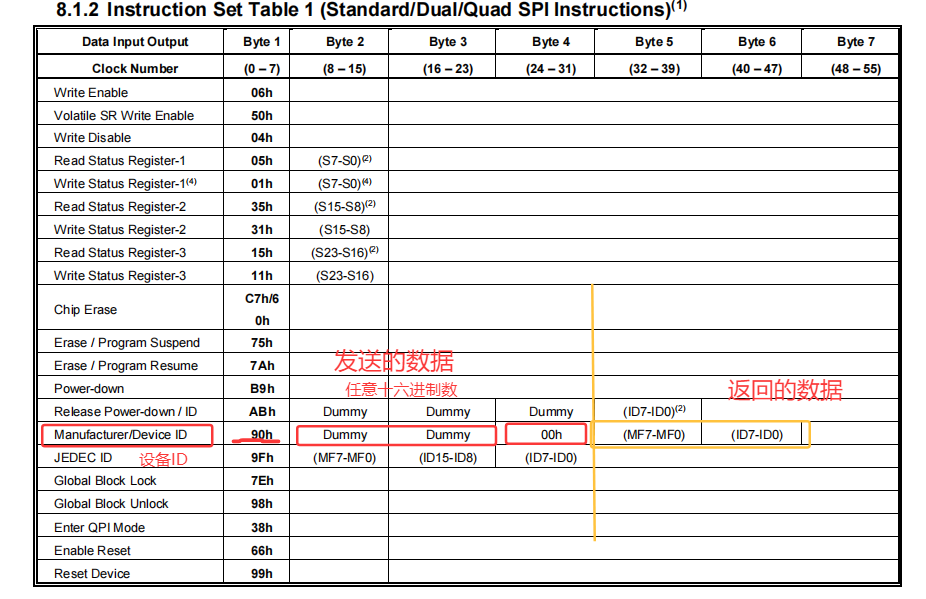
- 返回的数据
- 上述中,发送的字节:FLASH_ManufactureDivceID是 0x90。
- 上述,由于返回的是两个八位的数,将其保存在一个16位的变量中,因此使用位运算符。
小实验3:读写W25Q128(封装命令接口)
文件代码:
- w25q128.c文件代码:
代码配置流程:
- 初始化spi函数;
- 初始化GPIO的函数MspInit();
- 封装数据交换的函数;HAL_SPI_TransmitRecive ( )。
- 接下来封装指令的函数:使能、读状态寄存器1(判断busy位,封装等待空闲的函数while())、读数据、页写、擦除等指令。
- 在主函数中:擦除、写数据、读数据。
cs
#include "w25q128.h"
SPI_HandleTypeDef spi_handle = {0};
void w25q128_spi_init(void){
spi_handle.Instance = SPI1;
spi_handle.Init.Mode = SPI_MODE_MASTER; //配置成主模式还是从模式
spi_handle.Init.Direction = SPI_DIRECTION_2LINES; //配置全双工还是半双工
spi_handle.Init.DataSize = SPI_DATASIZE_8BIT; //数据的长度:8bit
spi_handle.Init.CLKPolarity = SPI_POLARITY_LOW; //CPOL = 0
spi_handle.Init.CLKPhase = SPI_PHASE_1EDGE; //CPHA = 奇数边沿检测
spi_handle.Init.NSS = SPI_NSS_SOFT; //软件控制SS引脚配置
spi_handle.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256; //波特率分频 :256
spi_handle.Init.FirstBit = SPI_FIRSTBIT_MSB; //高位先行还是低位先行:高位先行
//下面这三个先不需要考虑
spi_handle.Init.TIMode = SPI_TIMODE_DISABLE;
spi_handle.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
spi_handle.Init.CRCPolynomial = 7;
HAL_SPI_Init(&spi_handle);
}
void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi){
if(hspi->Instance == SPI1){
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_SPI1_CLK_ENABLE();
GPIO_InitTypeDef gpio_initstruct;
//NSS引脚
gpio_initstruct.Pin = GPIO_PIN_4;
gpio_initstruct.Mode = GPIO_MODE_OUTPUT_PP;
gpio_initstruct.Pull = GPIO_PULLUP;
gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA,&gpio_initstruct);
//SCL引脚和输出引脚
gpio_initstruct.Pin = GPIO_PIN_5 |GPIO_PIN_7;
gpio_initstruct.Mode = GPIO_MODE_AF_PP;
HAL_GPIO_Init(GPIOA,&gpio_initstruct);
//输入引脚
gpio_initstruct.Pin = GPIO_PIN_6;
gpio_initstruct.Mode = GPIO_MODE_INPUT;
HAL_GPIO_Init(GPIOA,&gpio_initstruct);
}
}
uint8_t w25q128_spi_swap_byte(uint8_t data){
uint8_t recv_data = 0;
HAL_SPI_TransmitReceive(&spi_handle,&data, &recv_data,1,1000); ///size:尺寸代表是多少个字节
return recv_data;
}
//初始化w25q128模块
void w25q128_init(void){
w25q128_spi_init();
}
//测试:读ID
uint16_t w25q128_read_id(void){
uint16_t device_id = 0;
W25Q128_CS(0);
w25q128_spi_swap_byte(FLASH_ManufactDeviceID);
w25q128_spi_swap_byte(0x00);
w25q128_spi_swap_byte(0x00);
w25q128_spi_swap_byte(0x00);
device_id = w25q128_spi_swap_byte(FLASH_DummyBtye) << 8; /* 将数据放在高8位 */
device_id |= w25q128_spi_swap_byte(FLASH_DummyBtye); /* 利用 |= 将数据放在低8位,并保留高8位的数据 */
W25Q128_CS(1);
return device_id;
}
//写使能
void w25q128_write_enable(void)
{
W25Q128_CS(0);
w25q128_spi_swap_byte(FLASH_WriteEable);
W25Q128_CS(1);
}
//读SR1寄存器
uint8_t w25q128_read_sr1(void){
uint8_t recv_data = 0;
W25Q128_CS(0);
w25q128_spi_swap_byte(FLASH_ReadStatusReg1);
recv_data = w25q128_spi_swap_byte(FLASH_DummyBtye);
W25Q128_CS(1);
return recv_data;
}
//发送地址的函数
void w25q128_send_address(uint32_t address){ //地址是3个字节,先发送高位,在发送中位,最后发送低位
w25q128_spi_swap_byte(address >> 16);//高位
w25q128_spi_swap_byte(address >> 8); //中位:由于函数是一个8位的,因此,移动后数据后,高位自动去掉。
w25q128_spi_swap_byte(address);
}
//忙等待的函数
void w25q128_wait_busy(void){
while ((w25q128_read_sr1() & 0x01) == 0x01); //判断最后一位是不是1
}
//读数据
void w25q128_read_data(uint32_t address,uint8_t *data,uint32_t size){
uint32_t i = 0;
W25Q128_CS(0);
w25q128_spi_swap_byte(FLASH_ReadDate);
w25q128_send_address(address);
for(i = 0;i< size; i++)
data[i] = w25q128_spi_swap_byte(FLASH_DummyBtye);
W25Q128_CS(1);
}
//页写:写的是256个字节,
void w25q128_write_page(uint32_t address,uint8_t *data,uint16_t size){ //代表的是字节数量
uint16_t i = 0;
w25q128_write_enable();
W25Q128_CS(0);
w25q128_spi_swap_byte(FLASH_PageProgram);
w25q128_send_address(address);
for(i = 0;i < size; i++)
w25q128_spi_swap_byte(data[i]);
W25Q128_CS(1);
//忙等待,写入数据是需要花费时间的;看状态寄存器的最后一位是0还是1
w25q128_wait_busy();
}
//扇区擦除
void w25q128_erase_sector(uint32_t address){
w25q128_write_enable();
w25q128_wait_busy();
W25Q128_CS(0);
w25q128_spi_swap_byte(FLASH_SectorErase);
w25q128_send_address(address);
W25Q128_CS(1);
w25q128_wait_busy();
}
//如何指定变量的数据类型是多少- w25128.h文件代码
- 定义一个宏函数:读取CS引脚的电平,是高电平还是低电平;
- 将指令表进行宏定义,便于读写方便。
cs
#ifndef __W25Q128_H__
#define __W25Q128_H__
#include "stm32f1xx.h"
#define W25Q128_CS(x) do{x ? \
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_SET): \
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_RESET);\
}while(0)
/* 指令表 */
#define FLASH_ManufactDeviceID 0x90
#define FLASH_WriteEable 0x06
#define FLASH_ReadStatusReg1 0x05
#define FLASH_ReadDate 0x03
#define FLASH_PageProgram 0x02
#define FLASH_SectorErase 0x20
#define FLASH_DummyBtye 0xFF
void w25q128_init(void);
uint16_t w25q128_read_id(void);
void w25q128_read_data(uint32_t address,uint8_t *data,uint32_t size);
void w25q128_write_page(uint32_t address,uint8_t *data,uint16_t size);
void w25q128_erase_sector(uint32_t address);
#endif- main.c文件代码
cs
#include "sys.h"
#include "led.h"
#include "delay.h"
#include "uart1.h"
#include "w25q128.h"
uint8_t data_write[4] = {0xAA,0xBB,0xEE,0xDD};
uint8_t data_read[4] = {0};
int main(void)
{
HAL_Init(); /* 初始化HAL库 */
stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
led_init(); /* LED初始化 */
uart1_init(115200);
printf("hello,world\r\n");
w25q128_init();
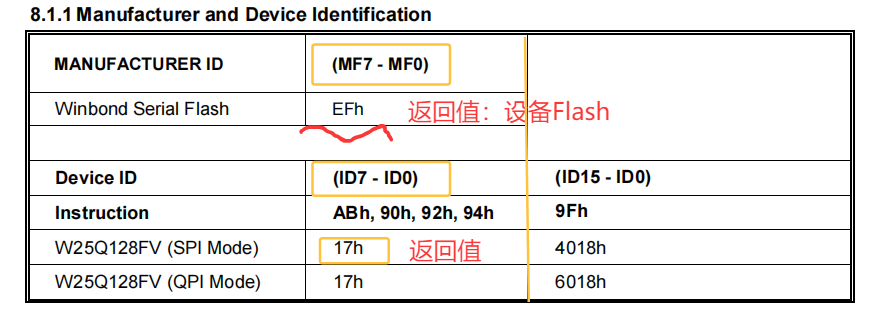
uint16_t device_id = w25q128_read_id();
printf("device_id = %X \r\n",device_id); /* %X是16进制,返回EF17 */
w25q128_erase_sector(0x000000);
w25q128_write_page(0x000000,data_write,4);
w25q128_read_data(0x000000,data_read,4);
printf("data_read: %X,%X,%X,%X\r\n",data_read[0],data_read[1],data_read[2],data_read[3]);
while(1)
{
}
}总结:
- 相关的位运算符的使用:判断第一位是0 还是 1: & = 0x01**、** <<、将数据放在高8位 << 8**、将数据放在低八位利用 "** | =" ;
- 熟悉模块的相关指令;读、写、擦除、读寄存器状态、使能。