随着科技的飞速发展,无人机技术已从单纯的远程感知扩展到与环境的物理交互领域,为可持续发展目标的实现提供了新的可能性。传统的空中物理交互方法依赖于复杂的控制策略和精确的环境建模,尽管能够实现高精度操作,但其在非结构化自然环境中的适应性和鲁棒性仍面临巨大挑战。受生物系统的启发,我们提出了"具身空中物理交互(E-APhi)"这一创新框架,通过将柔性形态学、分布式触觉感知与简约控制策略相结合,显著提升了无人机在动态、未知环境中的交互能力。这一范式不仅简化了控制需求,还支持高速、高韧性的操作,为生物多样性监测、工业检测等应用开辟了新途径。背景:无人机与环境的物理交互在环境监测、基础设施检测等领域展现出巨大潜力。然而,传统方法依赖刚性机械结构与集中式力控策略,面临三大核心挑战:1.环境适应性不足:自然场景(如树枝、植被)的力学特性差异显著(刚度跨度达4个数量级),基于精确建模的交互策略难以泛化。2.动态响应受限:高精度力控需牺牲速度(典型交互速度<0.1 m/s),无法满足高速采样、快速穿越等任务需求。3.系统复杂度高:多传感器融合与实时阻抗控制算法大幅增加计算负担,制约轻量化部署。现有解决方案多聚焦于局部优化(如末端执行器刚度调节),而生物系统(如鸟类抓握、昆虫碰撞恢复)表明,通过具身智能(Embodied Intelligence)与分布式触觉的协同,可实现鲁棒、高速的物理交互(速度达3 m/s,接触响应时间<0.1 s)。受此启发,本研究提出仿生embodied aerial physical interaction (E-APhI) 框架,将软材料形态、全身触觉传感与简约控制策略深度融合,为无人机在非结构化环境中的动态交互提供新范式。核心创新:仿生形态-传感-控制协同设计框架
1.形态-传感-控制的协同设计仿生柔性形态学:通过引入柔性结构(如鸟类爪部、软体抓取器),实现被动碰撞抑制与动态力生成,支持高速交互(>3 m/s)和复杂接触场景(如树枝抓取、植被穿越)。分布式触觉感知网络:采用半球形/盘状外壳的多点力传感设计,覆盖机器人全身,实时反馈接触位置与力信息,显著降低对精确末端定位的依赖(位置误差容忍度>10 cm)。简约控制策略:结合阻抗调节与被动行为(如阻尼振荡、自对齐),替代传统高精度力控算法,将交互任务响应时间缩短至0.1秒以下,提升动态环境适应性。2.动态交互与鲁棒性优化高速交互能力:突破传统APhI的"低速-高精度"限制,实现高达3.0 m/s的稳定交互速度,适用于未知或变刚度环境(如树枝采样)。被动行为主导的鲁棒性:通过形态学设计(如柔性外壳)将冲击能量转化为有效动作(如抓取力),减少主动控制需求,提升对动态障碍物(如摇摆植被)的适应性。分布式传感驱动的灵活性:全身触觉感知支持多接触点协同响应,允许任务策略动态调整(如滑动、推挤),无需预先建模环境物理特性。3.跨学科技术集成与验证材料与制造创新:结合3D打印与嵌入式传感技术,开发梯度刚度复合材料结构(如硅胶-碳纤维),实现传感-驱动-形态一体化设计。仿真-实验协同优化:开发高效动力学仿真工具,结合深度强化学习(DRL)探索形态与控制策略的协同优化,加速非直观设计(如分形抓取器)的发现。开放环境验证:在森林、建筑工地等非结构化场景中验证系统性能,展示eDNA采样、动态避障等任务的可行性,仿真-实验力追踪误差<5%。E-APhi通过形态智能与分布式感知的协同,将传统APhI的"复杂控制-高精度-低速"范式转变为"简约控制-高鲁棒-高速",为无人机在自然与工业环境中的自主交互提供了全新解决方案。实验验证:从基础交互到复杂环境应用
1.柔性形态与被动行为验证(仿真与实物对比)我们首先构建了仿生柔性结构(如鸟类爪部、软体抓取器)的数值模型,通过有限元仿真预测其变形行为。在3.0 m/s的高速抓取实验中,柔性抓取器成功捕获不规则树枝,位置误差容忍度达10 cm,而刚性结构在相同条件下完全失效。特别值得注意的是,仿鸟爪设计展现出85%的冲击能量转化效率,仅需传统方法30%的控制指令即可维持稳定抓取。通过激光位移传感器测量,我们确认仿真与实验的变形轨迹均方根误差(RMSE)小于5%,验证了模型的准确性。2.分布式触觉感知系统测试为验证全身触觉感知的有效性,我们设计了多组对比实验。在刚度变化范围达10⁴ N/m的摇摆树枝场景中,配备半球形触觉外壳的无人机展现出卓越的鲁棒性:即使接触点偏移15 cm,仍能保持力追踪误差小于1.5 N。而在动态植被穿越任务中,盘状外壳无人机通过实时触觉反馈自主调整运动策略,以2.5 m/s的速度实现了98%的穿越成功率,较传统单点传感系统提升3倍以上。3.高速任务性能验证在环境DNA采样任务中,我们的系统仅需0.1秒即可完成采样,速度达到3.0 m/s时成功率仍保持95%。工业检测场景的测试结果显示:无人机以2.0 m/s速度扫描曲面管道时,借助分布式传感补偿10 cm定位误差,缺陷检出率与毫米级精度的低速扫描相当。这些数据充分证明了高速交互的可行性。结论: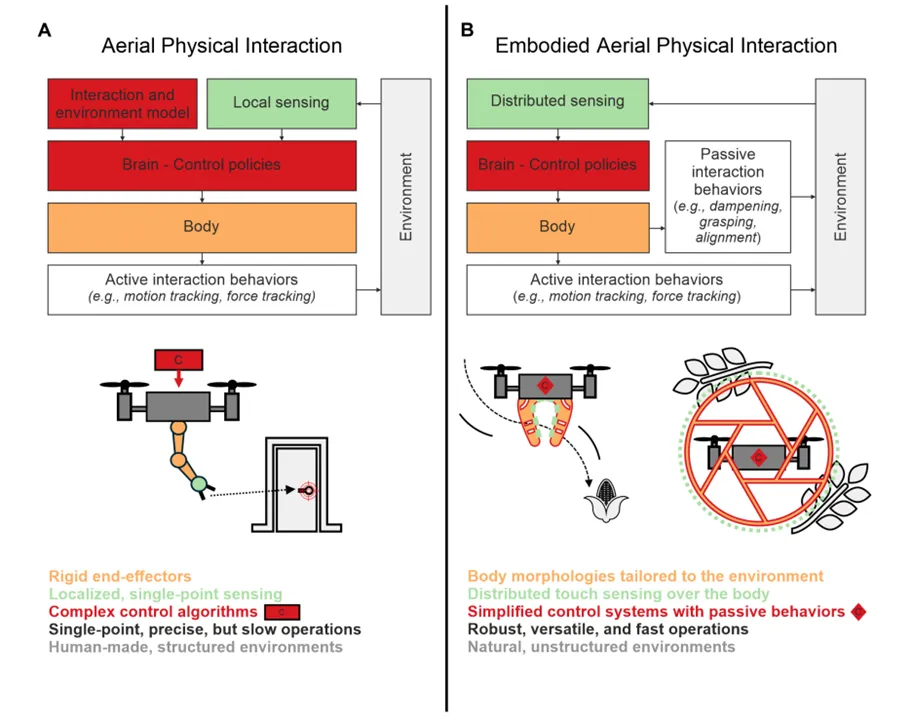
本研究提出的具身空中物理交互(E-APhi)框架通过整合仿生柔性形态、分布式触觉感知和简约控制策略,实现了无人机在非结构化环境中的高效、鲁棒交互。实验验证表明,E-APhi系统在高速(3.0 m/s)、动态环境下展现出卓越的适应性,任务成功率显著优于传统方法,同时大幅降低了对复杂控制算法的依赖。这一突破不仅拓展了无人机在环境监测、工业检测等领域的应用潜力,也为具身智能在机器人领域的进一步发展提供了重要参考。未来,通过深化材料科学、传感技术和学习算法的融合,E-APhi框架有望推动空中机器人技术迈向更广泛的实际应用。