传统图像分割方法
1、阈值分割
它利用图像中要提取的目标与背景在灰度上的差异,通过设置阈值来把像素分成若干类,从而实现目标与背景的分离。阈值分割有以下几种方法:(1)固定阈值分割(2)迭代阈值分割(3)大津法OTSU(4)自适应阈值分割
1.1固定阈值分割
将灰度值大于某一阈值的像素点设置为255,而小于等于该阈值的点设置为0。函数说明:函数threshold()可以将灰度图像转换为二值图像,图像完全由像素0和255构成呈现出只有黑白两色的视觉效果。经过二值化处理后的图像(Fix Iamge),仅包含黑白像素,用于分离目标与背景。
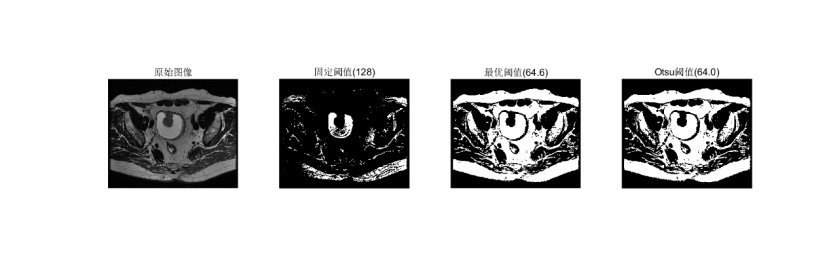
1.2固定阈值分割缺点
当图像存在光照不均匀时,全局固定阈值无法适应不同区域的亮度变化。例如,同一物体在明亮区域和阴影区域的灰度值差异较大,使用单一阈值可能导致部分区域过分割(误将背景划为前景)或欠分割(未能完全提取目标)。
2 边缘检测
边缘检测算法(如Canny、Sobel)通过梯度变化识别目标边界,而边缘通常对光照变化具有鲁棒性。结合边缘信息,可以约束阈值分割的范围,例如:仅在边缘附近进行局部阈值调整,避免全局阈值受光照不均的影响。通过边缘位置确定感兴趣区域(ROI),减少背景干扰。
边缘检测的目的就是找到图像中亮度变化剧烈的像素点构成的集合,表现出来往往是轮廓。如果图像中边缘能够精确的测量和定位,就意味着实际的物体能够被定位和测量,包括物体的面积、物体的直径、物体的形状等就能被测量。
2.1 Canny边缘检测
Canny边缘检测在一阶微分算子的基础上,增加了非最大值抑制和双阈值两项改进。利用非极大值抑制不仅可以有效地抑制多响应边缘,而且还可以提高边缘的定位精度;利用双阈值可以有效减少边缘的漏检率。
Canny边缘检测主要分四步进行:去噪声、计算梯度与方向角、非最大值抑制、滞后阈值化。
其中前两步,先用一个高斯滤波器对图像进行滤波,然后用Sobel水平和竖直检测子与图像卷积,来计算梯度和方向角。
第三步:非极大值抑制是一个关键步骤,目的是细化边缘,消除梯度方向上的非最大值,只保留最强的边缘像素。
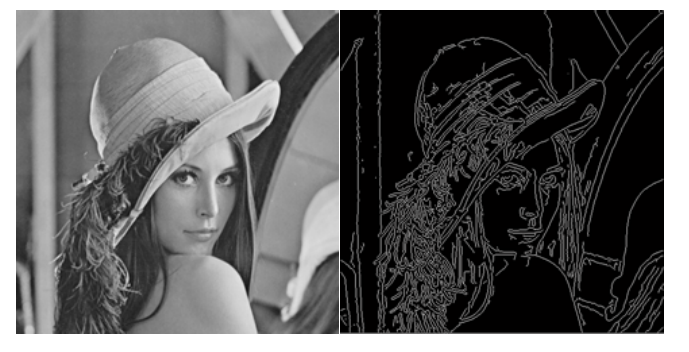
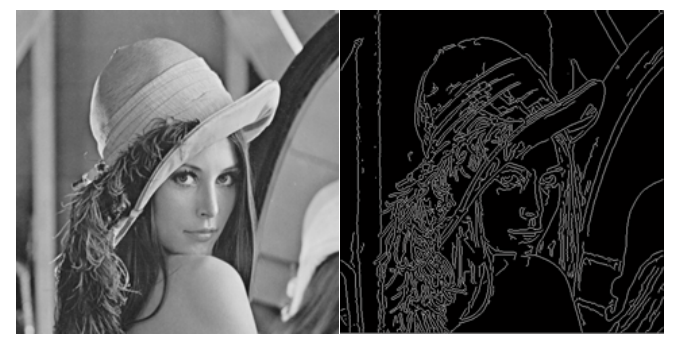
(1)二值化效果:边缘为白色(255),背景为黑色(0),形成高对比度的黑白图像。边缘线条单像素宽,清晰且连续
(2)输入是一张人脸照片,Canny检测后会将轮廓(如眼睛、鼻子、嘴唇)、头发边缘等转换为白色细线,其余区域为黑色。
2.2 滞后阈值化
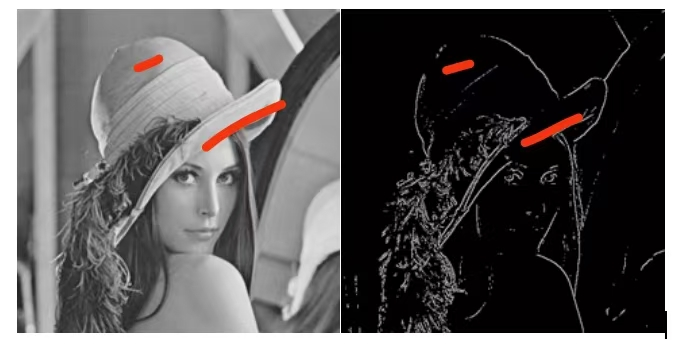
由于噪声的影响,经常会在本应该连续的边缘出现断裂的问题。滞后阈值化的目的是通过双阈值策略解决以下问题:
(1)筛选真实边缘:排除噪声引起的伪边缘。
(2)连接断裂边缘:确保弱边缘在合理范围内被保留,提升边缘连续性。
(3)平衡灵敏度与鲁棒性:避免单一阈值导致的过分割(保留过多噪声)或欠分割(丢失真实边缘)。
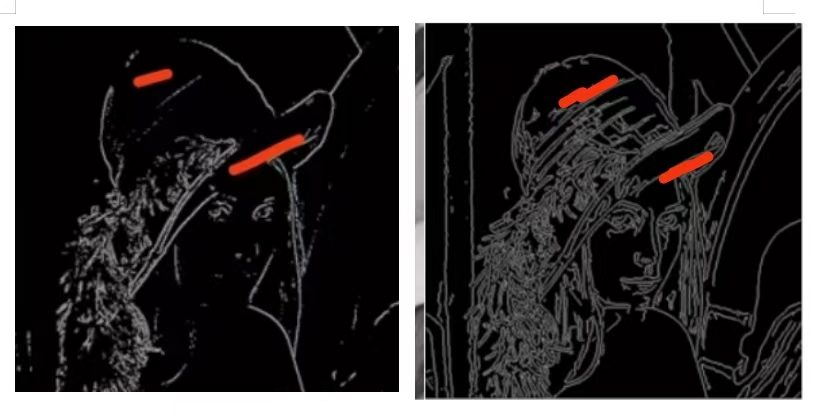
具体实现步骤(1)设定双阈值:
高阈值:用于直接标记强边缘(确信为真实边缘的像素)。
低阈值:用于标记弱边缘(可能是真实边缘的候选像素)。
(2)分类处理像素:
强边缘:直接保留为最终边缘。弱边缘:仅当与强边缘连通时保留。非边缘:直接舍弃。
边缘跟踪:从强边缘出发,沿梯度方向搜索相邻的弱边缘,若弱边缘与强边缘连通,则将其提升为强边缘。
2.3 Canny边缘检测优点
-
高精度边缘检测(单像素宽边缘)。
-
抗噪声能力强(高斯滤波预处理)。
-
能检测弱边缘(双阈值跟踪)