一、什么是元胞自动机(Cellular Automata, CA)
元胞自动机(CA) 是一种基于离散时间、离散空间与规则驱动演化 的动力系统,由 冯·诺依曼(John von Neumann) 于1940年代首次提出,用于模拟生物自我复制行为。
其基本思想是:
系统中每个元胞(cell)根据自身状态与邻域状态,依据某一组固定规则,在每一轮迭代中更新自己的状态,整个系统因此展现出复杂的宏观格局演化特征。
📚 经典定义(Wolfram, 1983):
A cellular automaton is a discrete model consisting of a regular grid of cells, each in one of a finite number of states, updated in discrete time steps according to a local rule.
二、元胞自动机模型的基本结构
元胞自动机系统通常包含以下 4 个核心组成部分:
| 要素 | 描述 |
|---|---|
| 空间结构 | 通常为规则格网(二维栅格),也可以扩展到六边形或三维空间 |
| 状态集合 | 每个格子(cell)拥有一个状态(如 0/1 表示是否建成,或土地类型编码) |
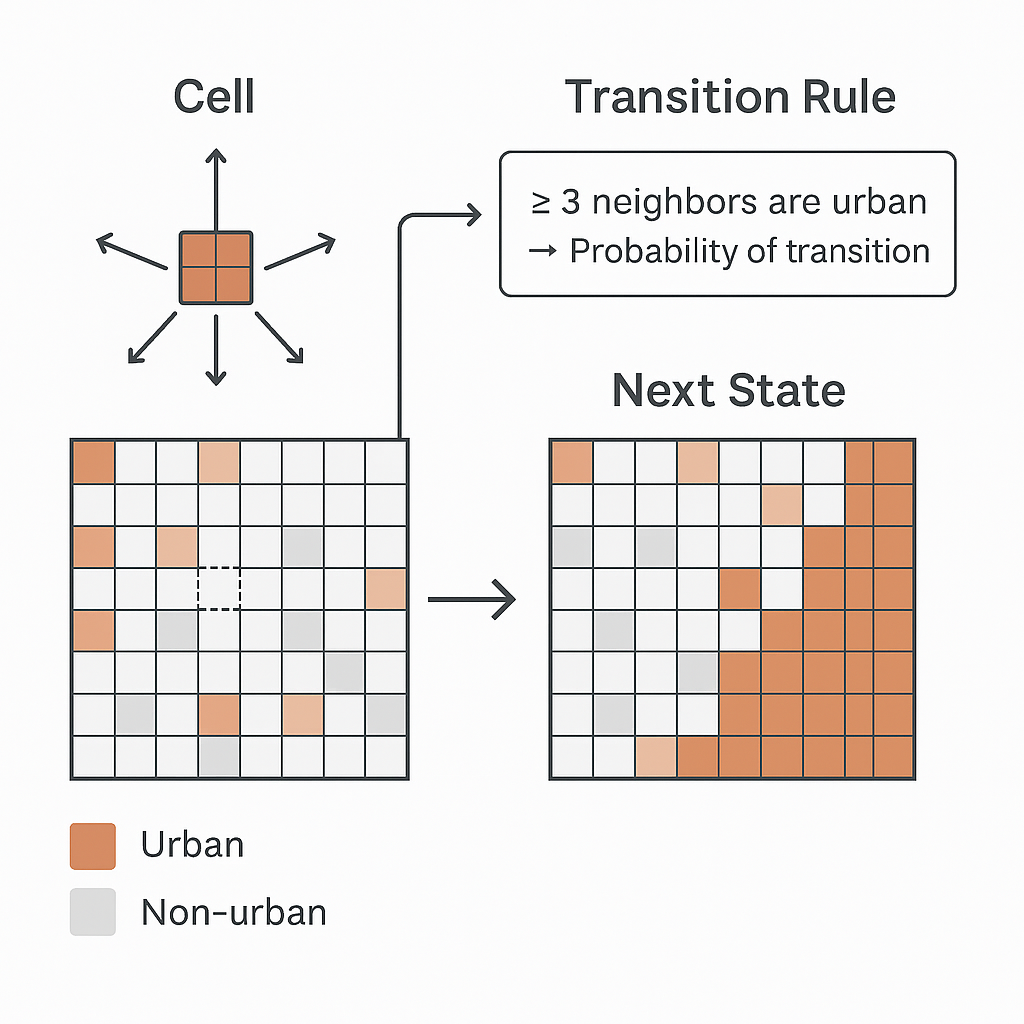
| 邻域结构 | 描述某个元胞周围哪些格子参与演化(如摩尔邻域 8 邻、冯·诺依曼邻域 4 邻) |
| 转移规则 | 一个映射函数:当前状态 + 邻域状态 → 下一状态,可能是确定的也可能是概率的 |
三、CA 在地理模拟中的引入
在地理学中,**Batty 和 Xie(1994)**首次将 CA 模型系统性地应用于城市增长模拟。他们指出:
"Urban systems are dynamic and complex, but CA provides a simple and intuitive structure to simulate their evolution."
------ Batty & Xie (1994), Environment and Planning B
四、元胞自动机概述
1.元胞自动机的基本组成
元胞自动机的数学模型由以下核心组件构成:
网格(Grid):
元胞自动机定义在一个离散的网格上,通常是一维(线形)、二维(平面)或更高维的网格。每个网格点称为一个元胞(cell)。
数学上,网格可以表示为整数坐标集,例如一维网格为 Z  ,二维网格为 Z 2
,二维网格为 Z 2 。
。
每个元胞有一个有限的状态集 S  ,例如二元状态 S ={0,1}
,例如二元状态 S ={0,1} (如"开"或"关")或多状态(如气温范围)。
(如"开"或"关")或多状态(如气温范围)。
状态(State):
每个元胞在时间 t  具有一个状态 s i (t )∈S
具有一个状态 s i (t )∈S  ,其中 i
,其中 i  表示元胞的位置。
表示元胞的位置。
整个网格的状态称为配置(configuration),用函数 C (t ):Z d →S  表示,其中 d
表示,其中 d  是网格维度。
是网格维度。
邻居(Neighborhood):
每个元胞的下一状态取决于其自身及其邻居的状态。邻居的定义依赖于网格类型和规则,例如:
一维:常用邻居包括左右相邻元胞(Von Neumann 邻域)或更广的范围。
二维:常见邻居包括 Von Neumann 邻域(上下左右4个元胞)或 Moore 邻域(包括对角线共 8个元胞)。
数学上,邻域可以定义为一个元胞的索引集 Ni  ,表示影响元胞 i
,表示影响元胞 i  的邻居集合。
的邻居集合。
转移规则(Transition Rule):
转移规则是一个函数 f :S |N |→S  ,决定元胞在下一时间步的状态。
,决定元胞在下一时间步的状态。
对于元胞 i  ,其状态更新公式为:
,其状态更新公式为:
s i (t +1)=f s j 1(t ),s j 2(t ),...,s j ∣N (t ),
其中 j 1,j 2,...,j |N |∈Ni  是邻居索引。
是邻居索引。
- 时间演化:
- 时间是离散的,记为 t =0,1,2,...
 。在每个时间步,所有元胞根据转移规则同步更新状态,形成新的配置 C (t +1)
。在每个时间步,所有元胞根据转移规则同步更新状态,形成新的配置 C (t +1) 。
。
-全局演化可以看作一个映射 F :S Z d →S Zd ,将当前配置映射到下一配置。
,将当前配置映射到下一配置。
2.数学原理
元胞自动机的数学原理可以从以下几个方面分析:
(1)离散动力系统
-元胞自动机是一个离散时间、离散空间的动力系统。全局配置空间 S Zd 是一个无限维的状态空间,转移规则 F
是一个无限维的状态空间,转移规则 F  定义了一个确定性映射。
定义了一个确定性映射。
-数学上,元胞自动机的演化可以表示为:
C (t +1)=F (C (t ))
-这种迭代映射可以生成复杂的动态行为,包括固定点、周期循环、混沌等。
(2)局部性与全局性
-元胞自动机的核心数学特性是局部规则生成全局行为。尽管转移规则 f  仅依赖于局部邻居状态,但通过同步更新,整个系统可以表现出复杂的模式,如自组织、涌现现象等。
仅依赖于局部邻居状态,但通过同步更新,整个系统可以表现出复杂的模式,如自组织、涌现现象等。
-例如,在一维元胞自动机中,规则可以定义为:
s i (t +1)=f s i -1(t ),s i (t ),s i +1(t )
对于二元状态 S ={0,1} ,可能的规则数为 223=256
,可能的规则数为 223=256 (如著名的 Wolfram 规则编号)。
(如著名的 Wolfram 规则编号)。
(3)规则的数学表达
-转移规则 f  通常是确定性的,但可以是任意函数。例如,在 Conway 的生命游戏(二维元胞自动机)中,状态 S ={0,1}
通常是确定性的,但可以是任意函数。例如,在 Conway 的生命游戏(二维元胞自动机)中,状态 S ={0,1} ,规则为:
,规则为:
- 存活(1):若一个元胞为 1,且其 Moore 邻域中有 2 或 3 个活元胞,则下一时刻仍为 1。
- 死亡( 0 ):若活元胞邻居少于 2 (孤立)或多于 3 (过挤),则变为 0 。
- 出生(1):若死元胞(0)有正好 3 个活邻居,则变为 1。
- 数学表达为:
s i (t +1)=1 if s i (t )=1 and j ∈N i s j (t )∈{2,3}1 if s i (t )=0 and j ∈N i s j (t )=30 otherwise 
(4)不变性与对称性
- 元胞自动机的规则通常具有空间平移不变性,即规则 f
 在网格上对所有元胞一致应用。
在网格上对所有元胞一致应用。 - 某些规则还具有时间对称性或可逆性,即存在反向规则使得系统可回溯(常见于物理模拟)。
- 数学上,平移不变性意味着对于任意平移变换 τ
 ,有 F (τ (C ))=τ (F (C ))
,有 F (τ (C ))=τ (F (C )) ,其中 τ
,其中 τ  是网格上的平移运算。
是网格上的平移运算。
(5)计算复杂性
-元胞自动机与计算理论密切相关。某些元胞自动机(如 Wolfram 的 Rule 110)被证明是图灵完备的,即它们可以模拟通用图灵机,执行任意计算。
-数学上,配置空间 S Zd 是一个 Cantor 集,转移规则 F
是一个 Cantor 集,转移规则 F  是一个连续映射(在适当的拓扑下)。复杂行为的涌现可以通过熵或李雅普诺夫指数等量来分析。
是一个连续映射(在适当的拓扑下)。复杂行为的涌现可以通过熵或李雅普诺夫指数等量来分析。
五、典型模型扩展与集成方法
- CA-Markov 模型
将 CA 与马尔科夫链结合,预测未来土地状态转移概率 + 空间演化
📖 Eastman, 2006. IDRISI Manual.
- SLEUTH 城市扩张模型
集成了 Slope、Landuse、Exclusion、Urban、Transportation、Hillshade 六因子
📖 Clarke et al., 1997. "A self-modifying cellular automaton model of historical urbanization..."
- CA-RF / CA-ANN
将机器学习(随机森林、神经网络)与 CA 融合,自动学习转移概率,提高预测精度
📖 Zhang et al., 2018. "Integrating cellular automata and random forest..."
📉 六、元胞自动机的优点与局限性
✅ 优点:
模型结构简单,计算高效,逻辑直观
与遥感栅格、GIS 空间数据天然兼容
可模拟空间自组织、扩散与边界演化
❌ 局限性:
传统规则往往静态,缺乏学习与适应性
难以建模非局域过程(如政策驱动)
参数敏感,依赖专家经验或反复校准
📌 七、研究趋势与发展方向
📈 智能 CA:与机器学习融合(CA-RF, CA-ANN)自动学习规则
🔗 多主体模型集成:模拟居民、开发商行为(CA + ABM)
🌐 多尺度建模:宏观土地转移 + 微观邻域演化
🛰 GEE + CA 集成:基于大尺度遥感数据动态建模(MODIS + CA)
python
import numpy as np
import matplotlib.pyplot as plt
# 设置参数
size = 50 # 网格大小 50x50
steps = 20 # 模拟步数
threshold = 3 # 至少有多少城市邻居才能考虑转化
probability = 0.6 # 转化为城市的概率
# 初始化格网
grid = np.zeros((size, size), dtype=int)
# 初始化种子城市(中心点)
grid[size//2, size//2] = 1
# 8邻域方向(Moore 邻域)
neighbors = [(-1, -1), (-1, 0), (-1, 1),
(0, -1), (0, 1),
(1, -1), (1, 0), (1, 1)]
# 演化函数
def update(grid):
new_grid = grid.copy()
for i in range(1, size-1):
for j in range(1, size-1):
if grid[i, j] == 0:
count = sum(grid[i+dx, j+dy] for dx, dy in neighbors)
if count >= threshold and np.random.rand() < probability:
new_grid[i, j] = 1
return new_grid
# 逐步模拟
for step in range(steps):
plt.imshow(grid, cmap='Greys')
plt.title(f'Step {step}')
plt.pause(0.3) # 暂停显示
grid = update(grid)
plt.show()