目录
- [一、STM32G4 电机外设篇(三) TIM1 发波 和 ADC COMP DAC级联](#一、STM32G4 电机外设篇(三) TIM1 发波 和 ADC COMP DAC级联)
-
-
- [1 TIM1 高级定时器发波](#1 TIM1 高级定时器发波)
-
- [1.1 stm32cubemx配置](#1.1 stm32cubemx配置)
- [2 TIM1 ADC COMP DAC级联](#2 TIM1 ADC COMP DAC级联)
-
- [2.1 stm32cubemx配置](#2.1 stm32cubemx配置)
- 附学习参考网址
-
一、STM32G4 电机外设篇(三) TIM1 发波 和 ADC COMP DAC级联
1 TIM1 高级定时器发波
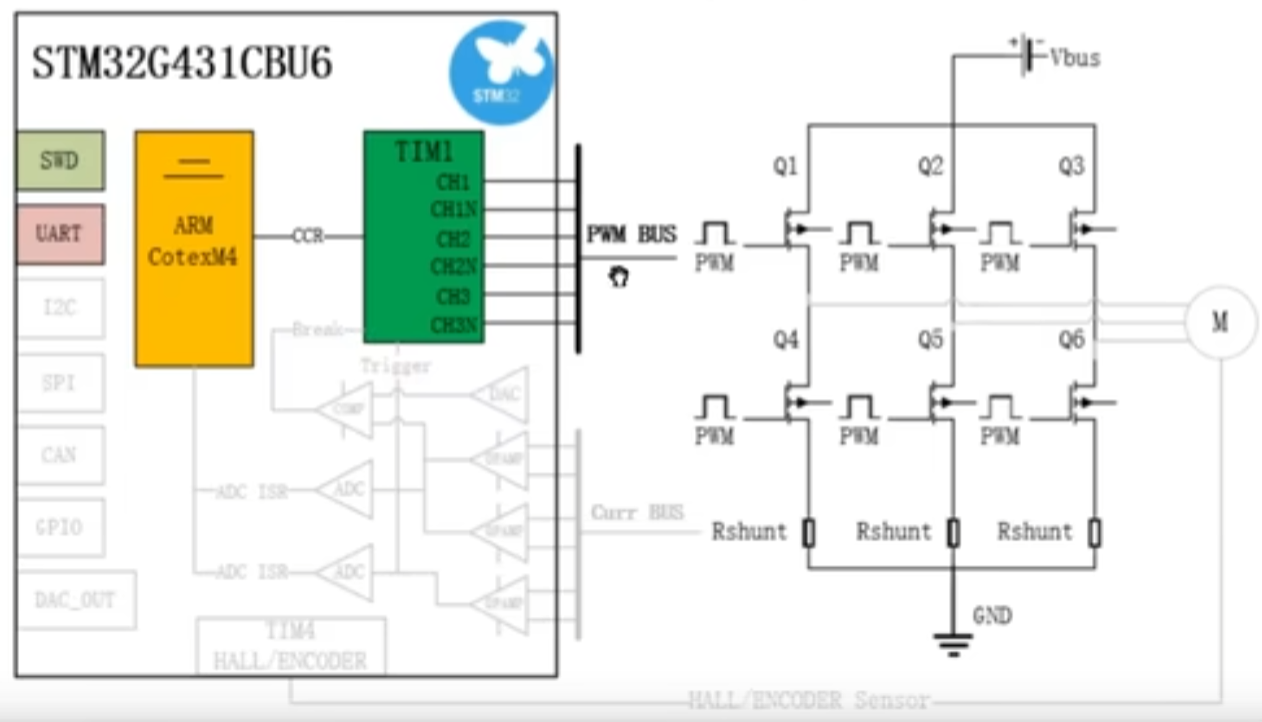
- 本章接线图详见之前的文章,记住要断开三相电机的uvw接线,否则输出的pwm波会影响电机
1.1 stm32cubemx配置
-
本实验计划使用TIM1发出3对互补的PWM波,来模拟驱动电机
-
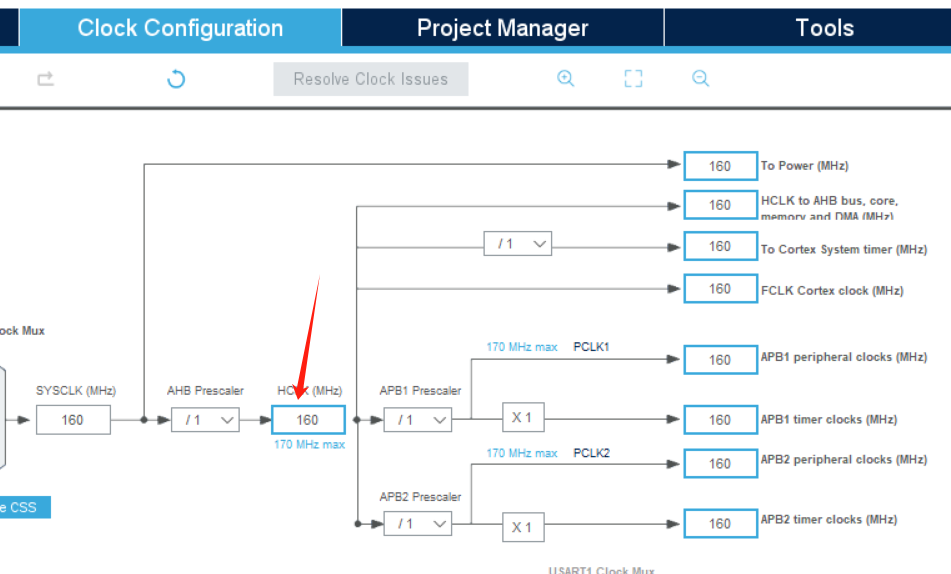
打开之前文章的STM32CubeMx,配置时钟源和TIM1
-
使用通道4触发ADC采样,配置PWM但是不输出
-
RCR设置为1
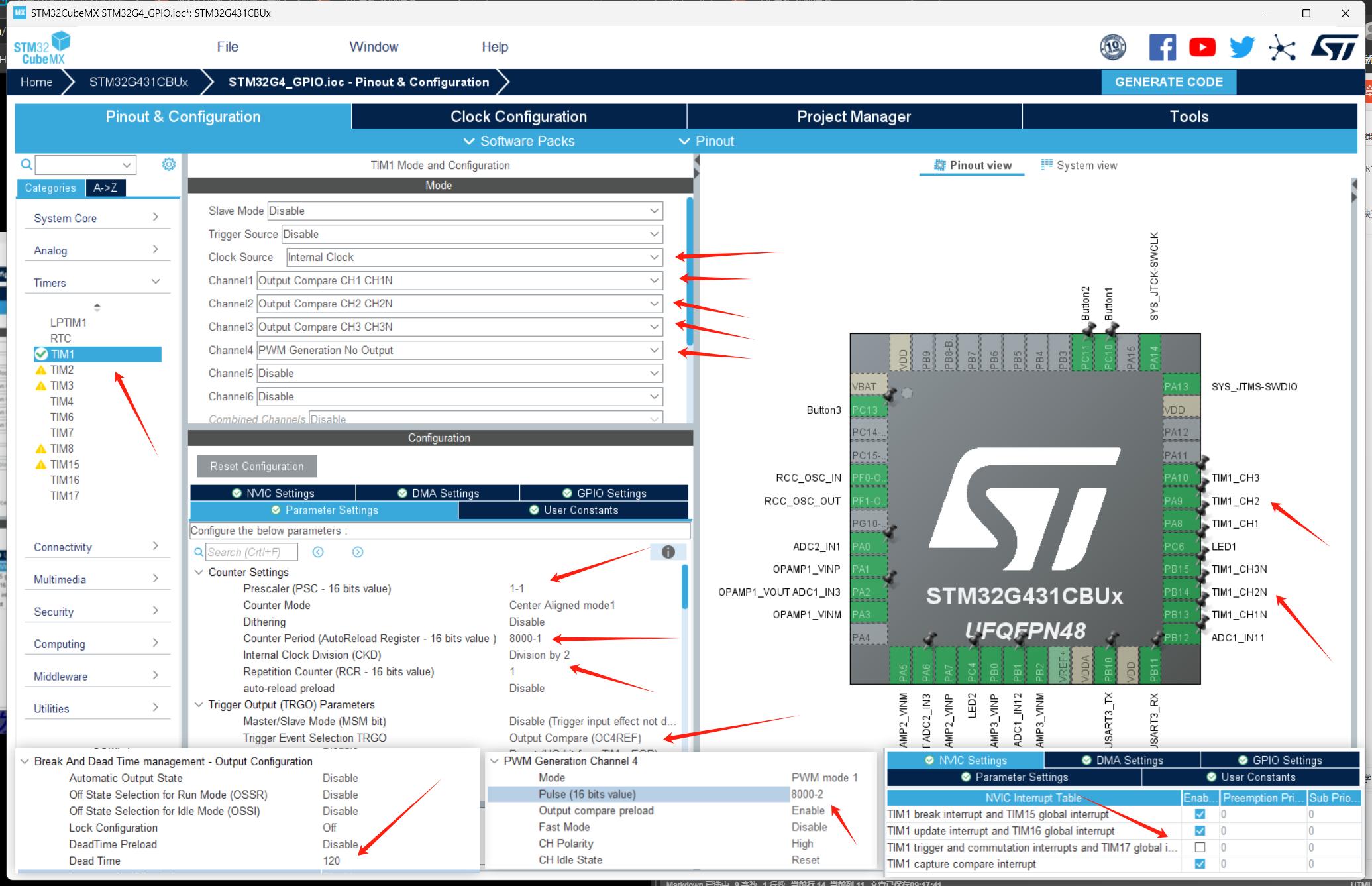
-
RCR可以理解为一个队计时器触发频率的分频
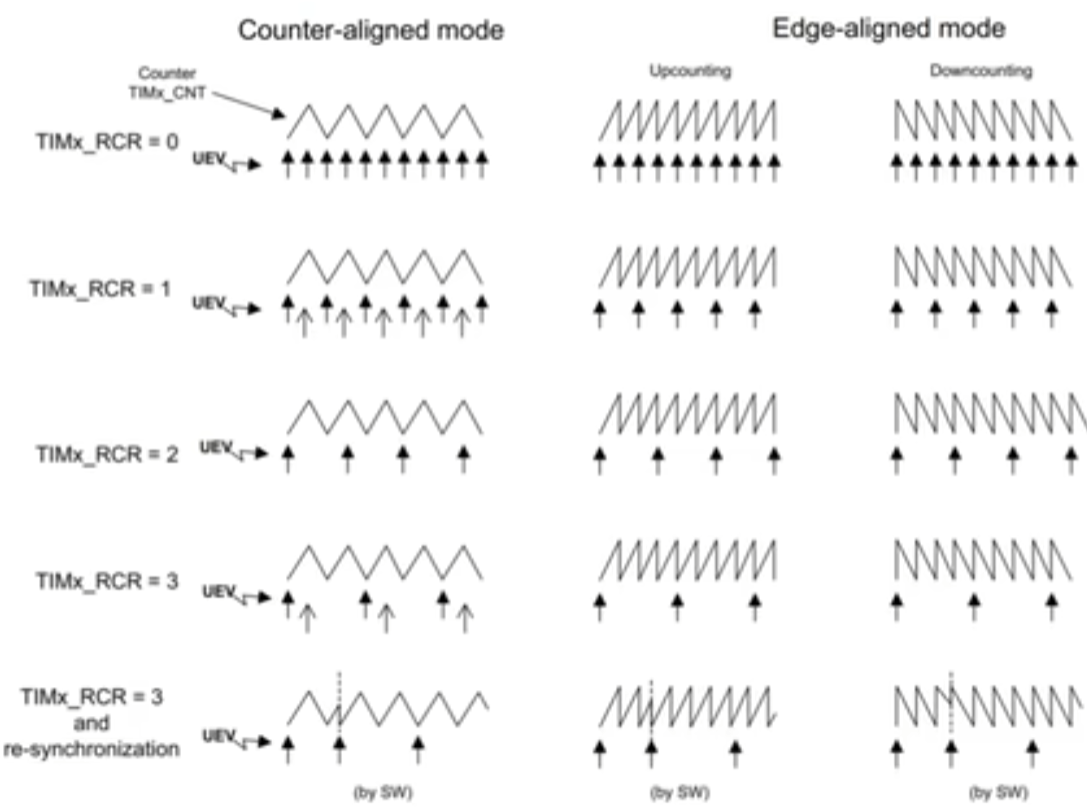
-
设置完成后打开keil文件,修改代码
- 注释User Code 4中的中断处理函数,约在291行
c
//User Code PV中修改
float temp[3];
uint8_t tempData[16] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0x80,0x7F};
//User Code 2中修改
HAL_OPAMP_Start(&hopamp1);//使能运放
HAL_OPAMP_Start(&hopamp2);
HAL_OPAMP_Start(&hopamp3);
HAL_UART_Receive_IT(&huart3, (uint8_t *)&aRxBuffer, 1);
HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED);//自校验,减少采样误差
HAL_ADCEx_Calibration_Start(&hadc2,ADC_SINGLE_ENDED);
TIM1->PSC = 30000;
TIM1->ARR = 10000;
TIM1->CCR1 = 2000;
TIM1->CCR2 = 5000;
TIM1->CCR3 = 8000;
HAL_TIM_Base_Start(&htim1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_3);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_2);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_3);
/* USER CODE BEGIN WHILE */修改
while(1)
{
// HAL_ADC_Start(&hadc1);
// HAL_ADC_Start(&hadc2);//使能规则组转捿
// HAL_ADCEx_InjectedStart_IT(&hadc1);
// HAL_ADCEx_InjectedStart_IT(&hadc2);//使能规则组转换,并产生注入组中断
// temp[0] = HAL_ADC_GetValue(&hadc1);
// temp[1] = HAL_ADC_GetValue(&hadc2) * 0.02094726f; //根据分压电阻计算
// memcpy(tempData, (uint8_t *)&temp, sizeof(temp));
// HAL_UART_Transmit_DMA(&huart3, (uint8_t *)tempData, 24);
// HAL_Delay(1);
if((GPIOA->IDR & GPIO_PIN_8)!=0)
{
temp[0] = 1.0f;
}
else
{
temp[0] = 0.0f;
}
if((GPIOA->IDR & GPIO_PIN_9)!=0)
{
temp[1] = 3.0f;
}
else
{
temp[1] = 2.0f;
}
if((GPIOA->IDR & GPIO_PIN_10)!=0)
{
temp[2] = 5.0f;
}
else
{
temp[2] = 4.0f;
}
memcpy(tempData, (uint8_t *)&temp, sizeof(temp));
HAL_UART_Transmit_DMA(&huart3, (uint8_t *)tempData, 16);
}
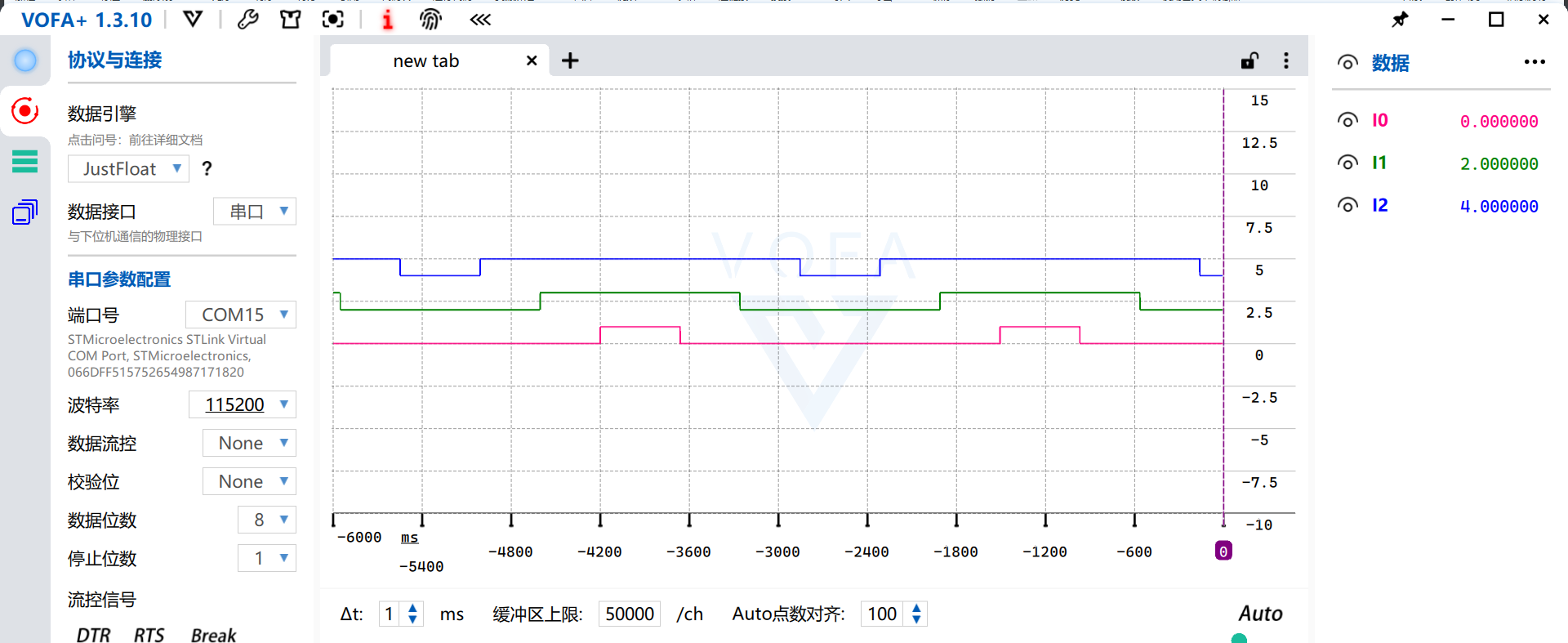
/* USER CODE END WHILE */- 打开VOFA,就能看到成功的PWM曲线图像
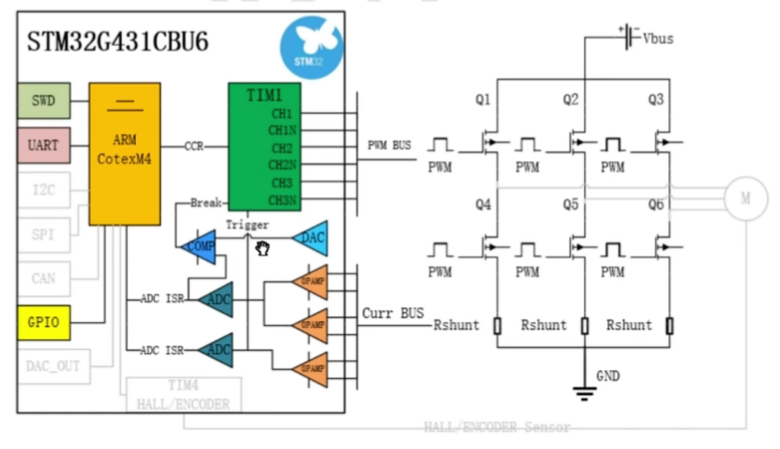
2 TIM1 ADC COMP DAC级联
- 电机控制环路主要涉及的外设功能包含高级定时器TIM1的发波,OPAMP 及 ADC 准确的采样三相电流,并在三相电流过流时及时封波,避免损坏硬件
- 本文将会使用STM32G4内部 TIM1ADCCOMP DAC级联使用
- TIM1 发波时序和电流采样触发
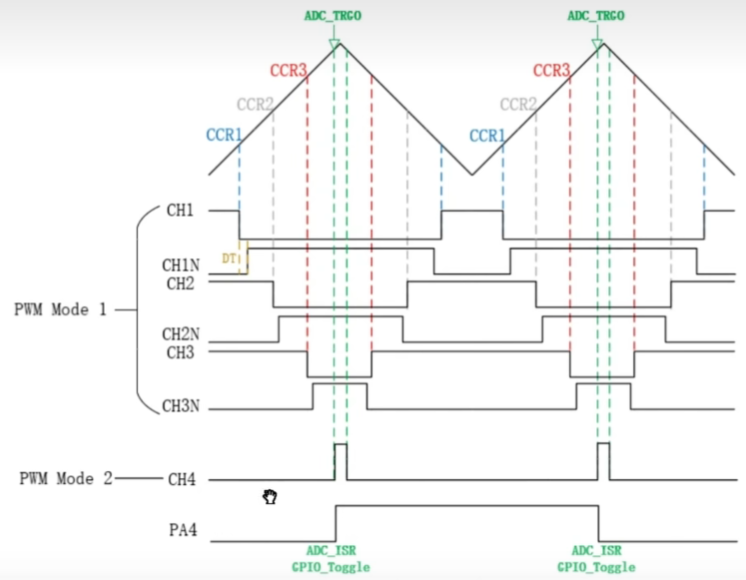
- 在最高点前一点采样,因为采样需要一个短暂的时间,这个时间段电流最稳定
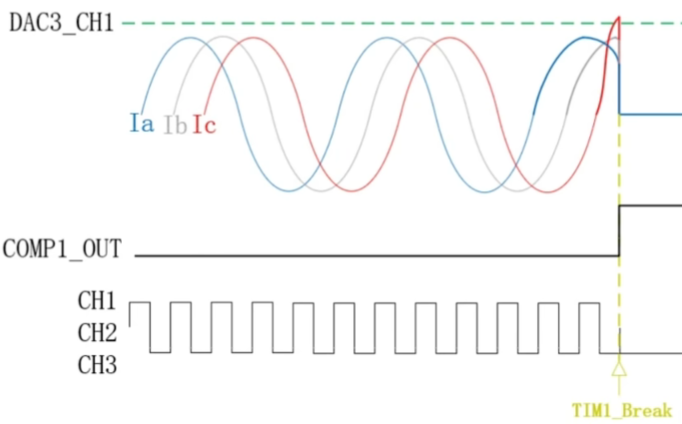
- 三相电流过流封波时序
2.1 stm32cubemx配置
-
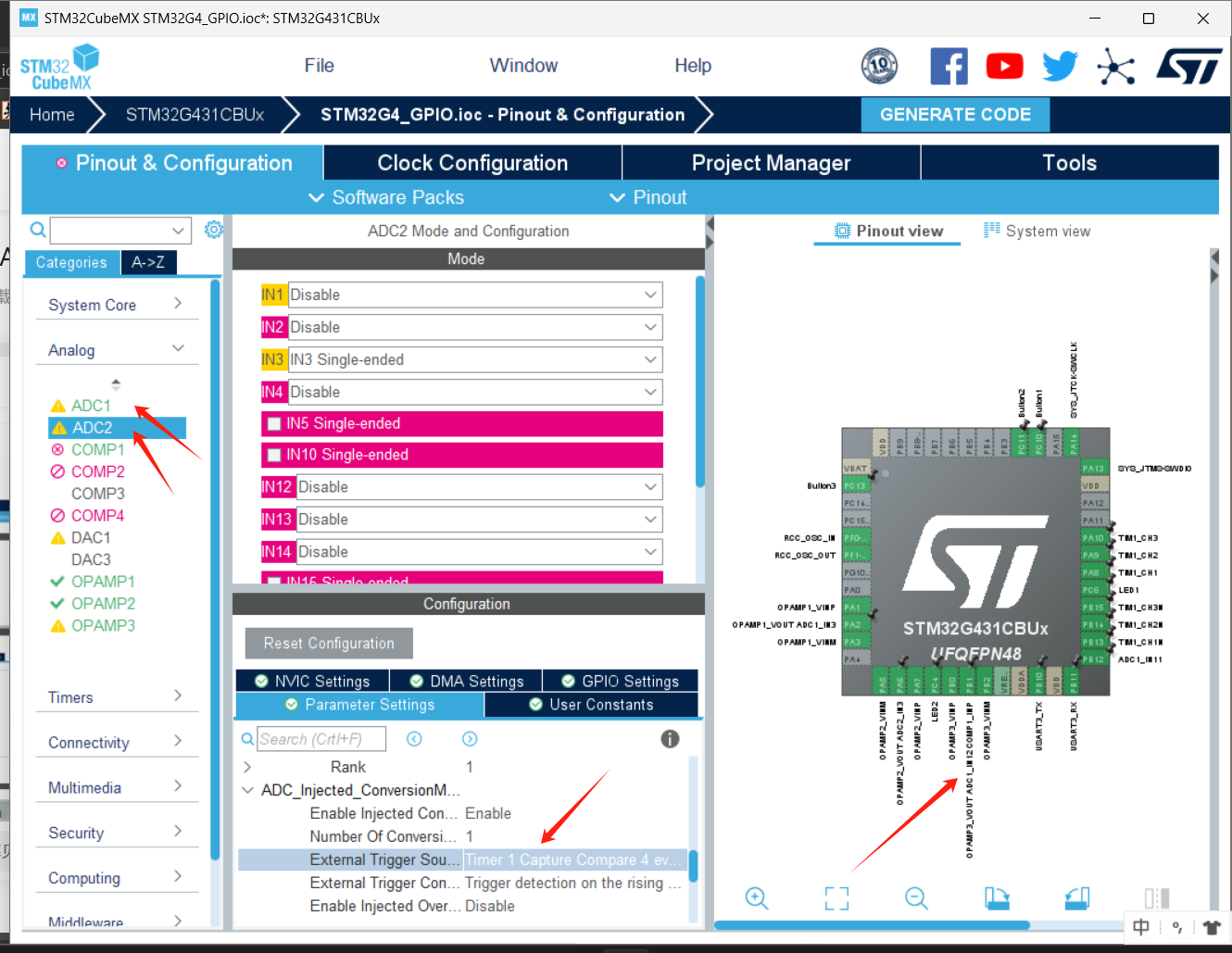
在上一章的工程基础上增加TIM1通道4的触发源,作为ADC电流采样注入组的触发源,分别修改ADC1和ADC2的注入组转换触发源为TIM1比较4事件,增加PB1引脚功能
-
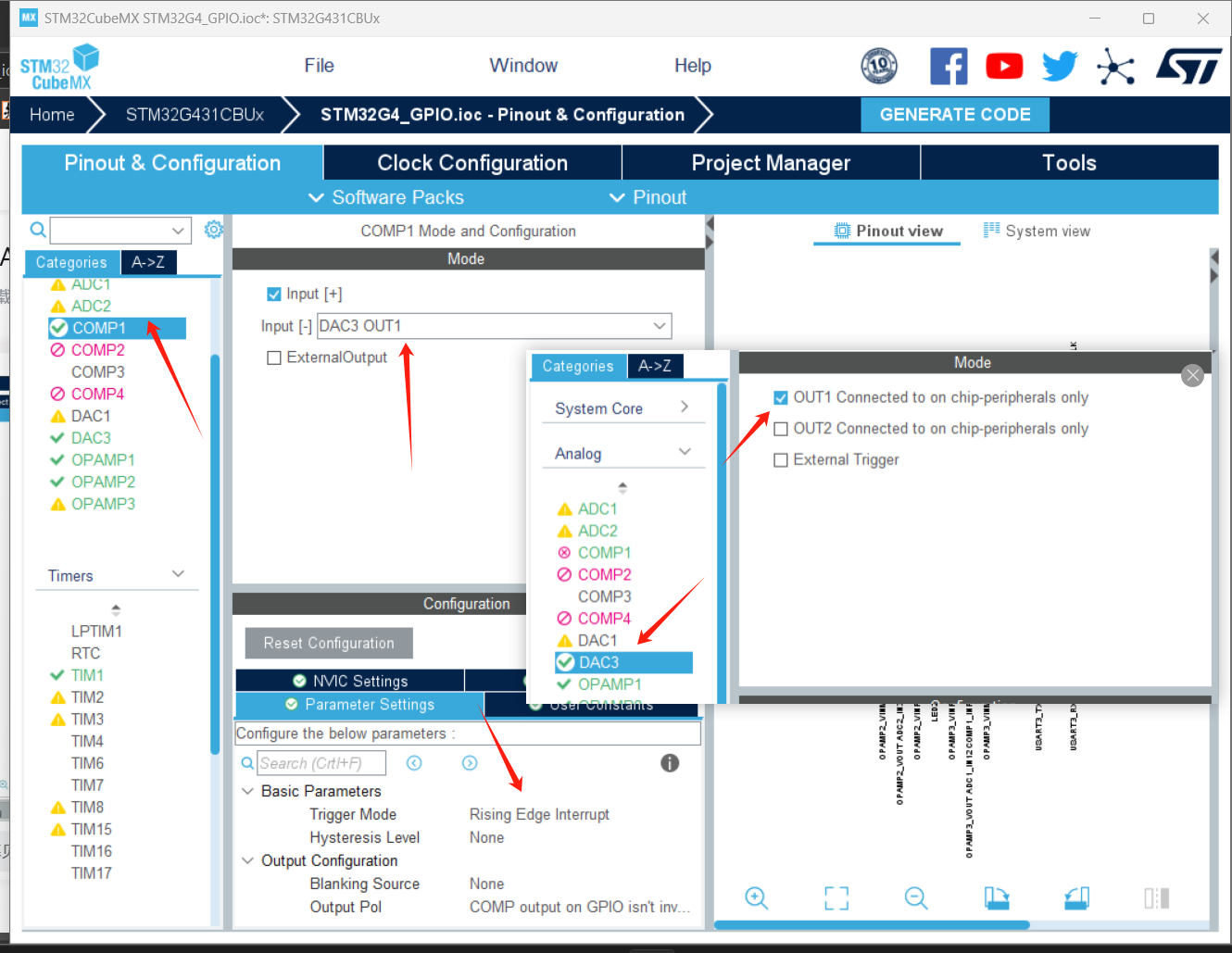
设置DAC_CHI连接MCU内部外设,其它参数默认
-
使能比较器负向为DAC3,触发方式为上升沿触发
-
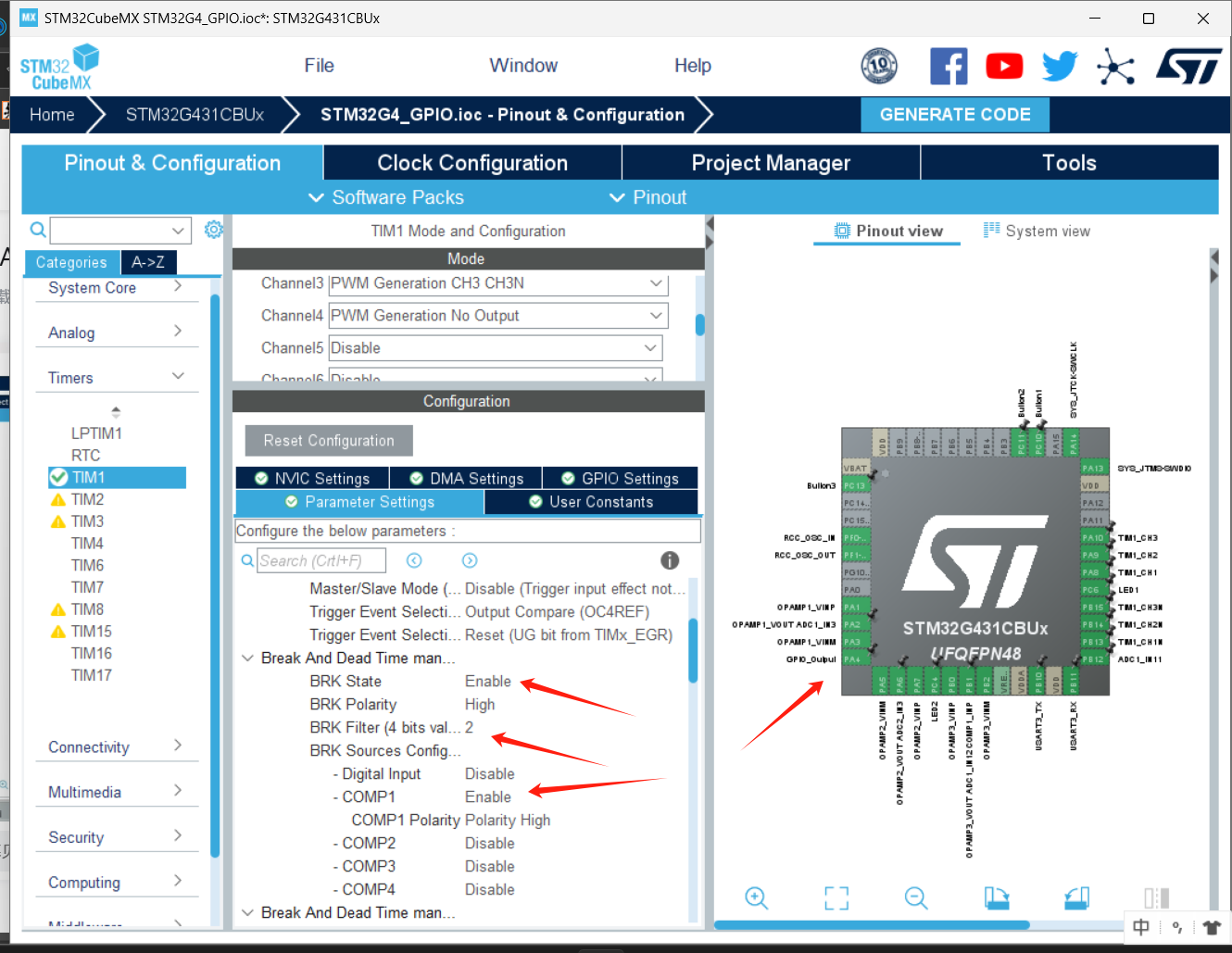
设置封波实现的break触发,设置GPIO4,生成代码,
-
打开Keil软件修改代码
c
uint8_t adc1_in1, adc1_in2, adc1_in3;
float IA, IB, IC;
uint8_t ADC_offset, IA_Offset, IB_Offset, IC_Offset;
float load_data[5];
float temp[5];
uint8_t tempData[24] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0x80,0x7F};
/* USER CODE BEGIN 2 */
HAL_OPAMP_Start(&hopamp1);//使能运放
HAL_OPAMP_Start(&hopamp2);
HAL_OPAMP_Start(&hopamp3);
HAL_UART_Receive_IT(&huart3, (uint8_t *)&aRxBuffer, 1);
HAL_ADCEx_Calibration_Start(&hadc1,ADC_SINGLE_ENDED);//自校验,减少采样误差
HAL_ADCEx_Calibration_Start(&hadc2,ADC_SINGLE_ENDED);
TIM1->ARR = 8000-1;
TIM1->CCR4 = 8000-2;
HAL_TIM_Base_Start(&htim1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_4);
HAL_ADCEx_InjectedStart_IT(&hadc1);
HAL_ADCEx_InjectedStart(&hadc2);
HAL_DAC_Start(&hdac3, DAC_CHANNEL_1);
HAL_DAC_SetValue(&hdac3, DAC_CHANNEL_1, DAC_ALIGN_12B_R, 3000);
HAL_COMP_Start(&hcomp1);
/* USER CODE BEGIN WHILE */
while(1)
{
HAL_ADC_Start(&hadc1);
HAL_ADC_Start(&hadc2);
Vpoten = HAL_ADC_GetValue(&hadc1);
adc_vbus = HAL_ADC_GetValue(&hadc2);
Vbus = adc_vbus * 3.3f/4096*26;
HAL_Delay(10);
}
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(GPIO_Pin);
if(Button2_Pin == GPIO_Pin)
{
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_2);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_3);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1);
}
if(Button3_Pin == GPIO_Pin)
{
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_1);
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_2);
HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_3);
HAL_TIMEx_PWMN_Stop(&htim1, TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Stop(&htim1, TIM_CHANNEL_2);
HAL_TIMEx_PWMN_Stop(&htim1, TIM_CHANNEL_3);
}
}
//注入中断处理程序
void HAL_ADCEx_InjectedConvCpltCallback(ADC_HandleTypeDef *hadc)
{
static uint8_t cnt;
/* Prevent unused argument(s)compilation warning */
UNUSED(hadc);
if(hadc == &hadc1)
{
if(ADC_offset == 0)
{
cnt++;
adc1_in1 = hadc1.Instance->JDR1;
adc1_in2 = hadc2.Instance->JDR1;
adc1_in3 = hadc1.Instance->JDR2;
IA_Offset += adc1_in1;
IB_Offset += adc1_in2;
IC_Offset += adc1_in3;
if(cnt >= 10)
{
ADC_offset =1;
IA_Offset = IA_Offset/10;
IB_Offset = IB_Offset/10;
IC_Offset = IC_Offset/10;
}
}
else
{
adc1_in1 = hadc1.Instance->JDR1;
IA = (adc1_in1 - IA_Offset)*0.0193359375f;
adc1_in2 = hadc2.Instance->JDR1;
IB = (adc1_in2 - IB_Offset)*0.0193359375f;
adc1_in3 = hadc1.Instance->JDR2;
IC = (adc1_in3 - IC_Offset)*0.0193359375f;
TIM1->CCR1= 2000;
TIM1->CCR2= 4000;
TIM1->CCR3= 6000;
load_data[0] = IA;
load_data[1] = IB;
load_data[2] = IC;
load_data[3]= 0;
load_data[4]= 0;
memcpy(tempData,(uint8_t*)&load_data, sizeof(load_data));
HAL_UART_Transmit_DMA(&huart3,(uint8_t *)tempData, 6*4);
}
}
}- 不知道为啥产生了一个4.4A的偏差
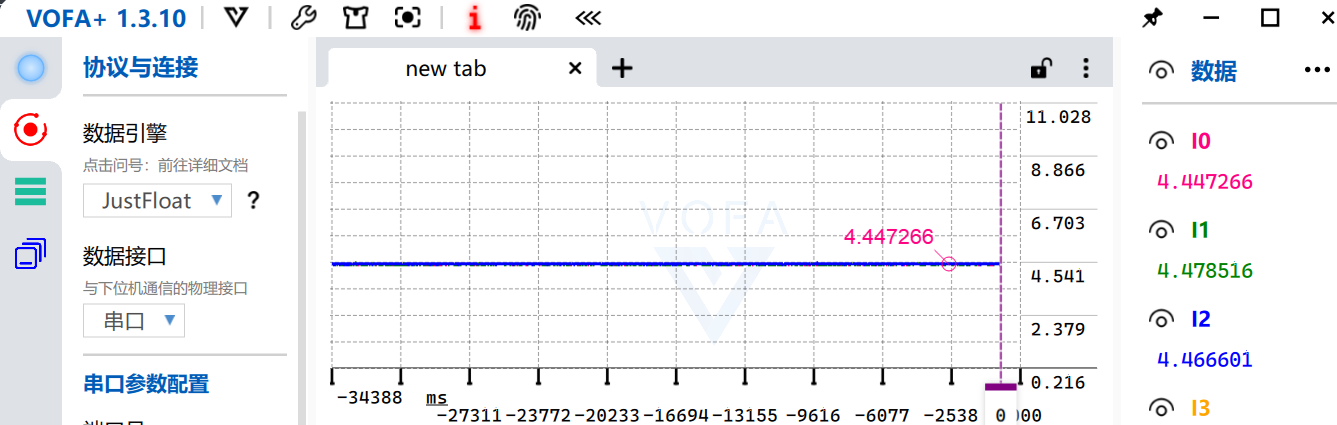
- 注意IA_Offset的大小要设置为uint16_t,否则他无法容下十个adc1_in1的累加值,会产生一个4.4的偏移(6.2日更新)
- 通过这种十次初始采样来确定电流偏移值的方法可以更加精确获得电流采集真实值