硬件环境:NVIDIA Jeston Orin nx
系统:Ubuntu 20.04
任务:跑通 EuRoC MAV Dataset 数据集
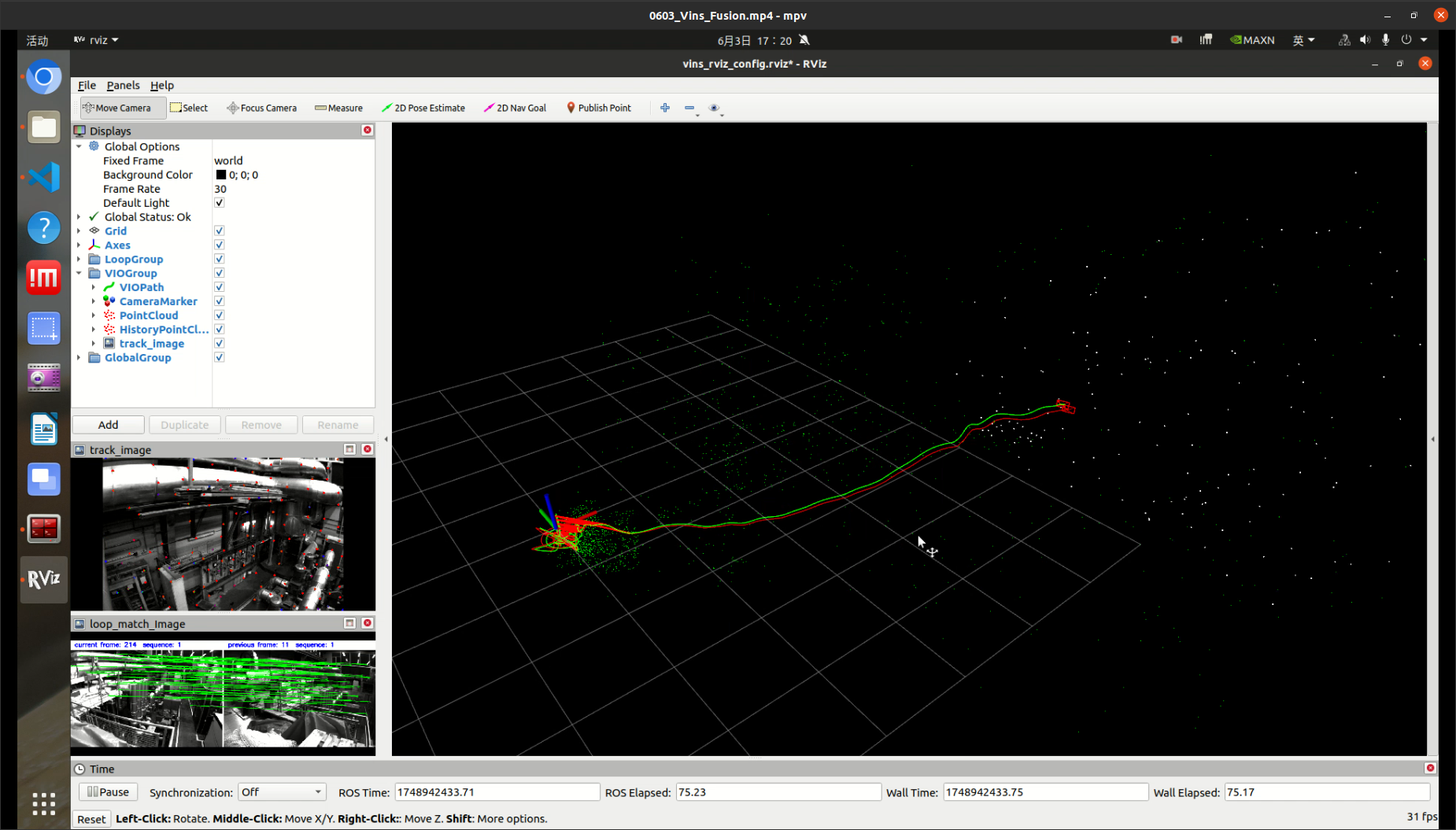
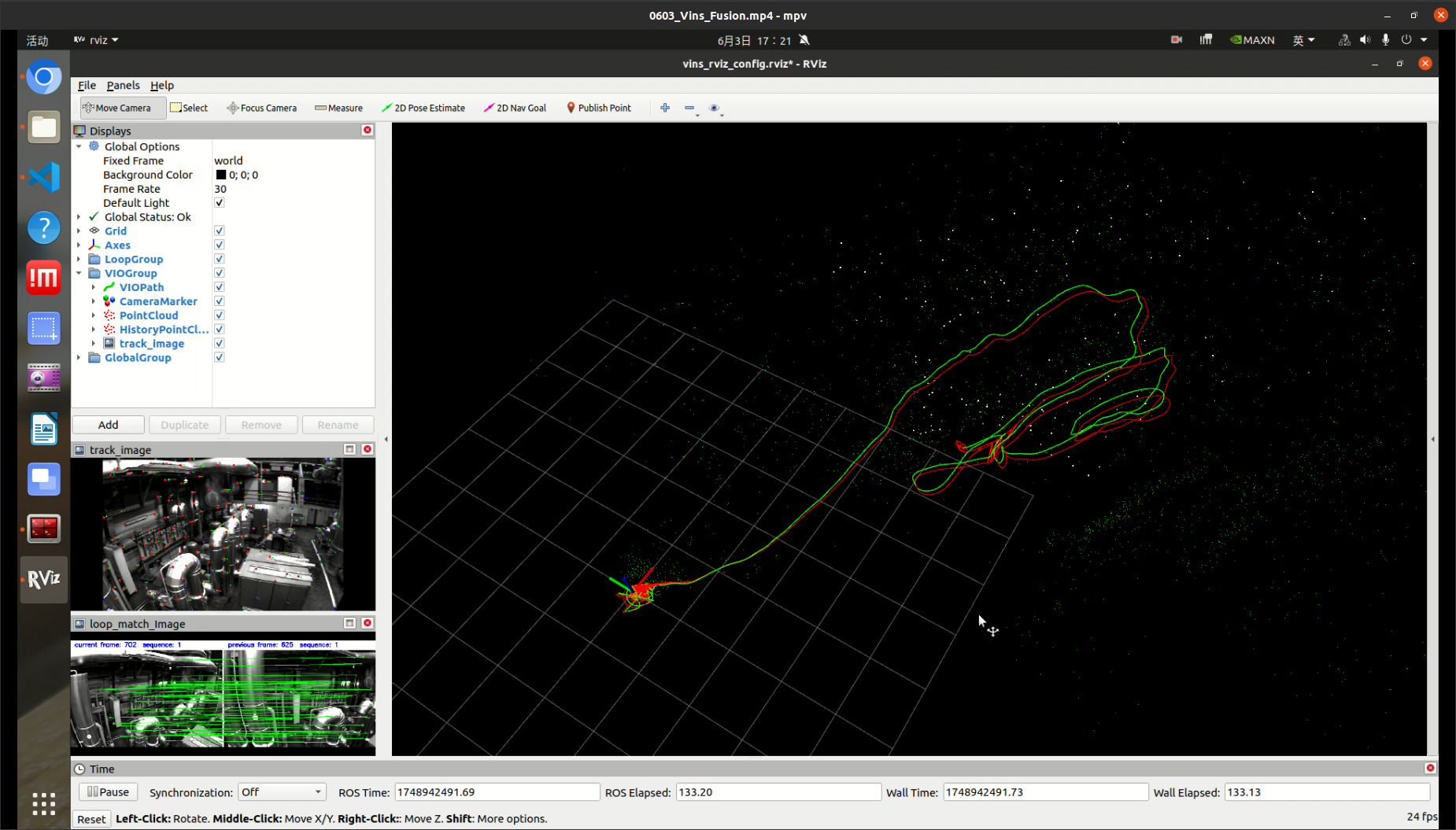
展示结果:
编译Vins Fusion
创建工作空间vins_ws
bash
# 创建目录结构
mkdir -p ~/vins_ws/src
cd ~/vins_ws/src
# 初始化工作空间(生成 CMakeLists.txt)
catkin_init_workspace
# 克隆官网的代码
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
cd ..
catkin_make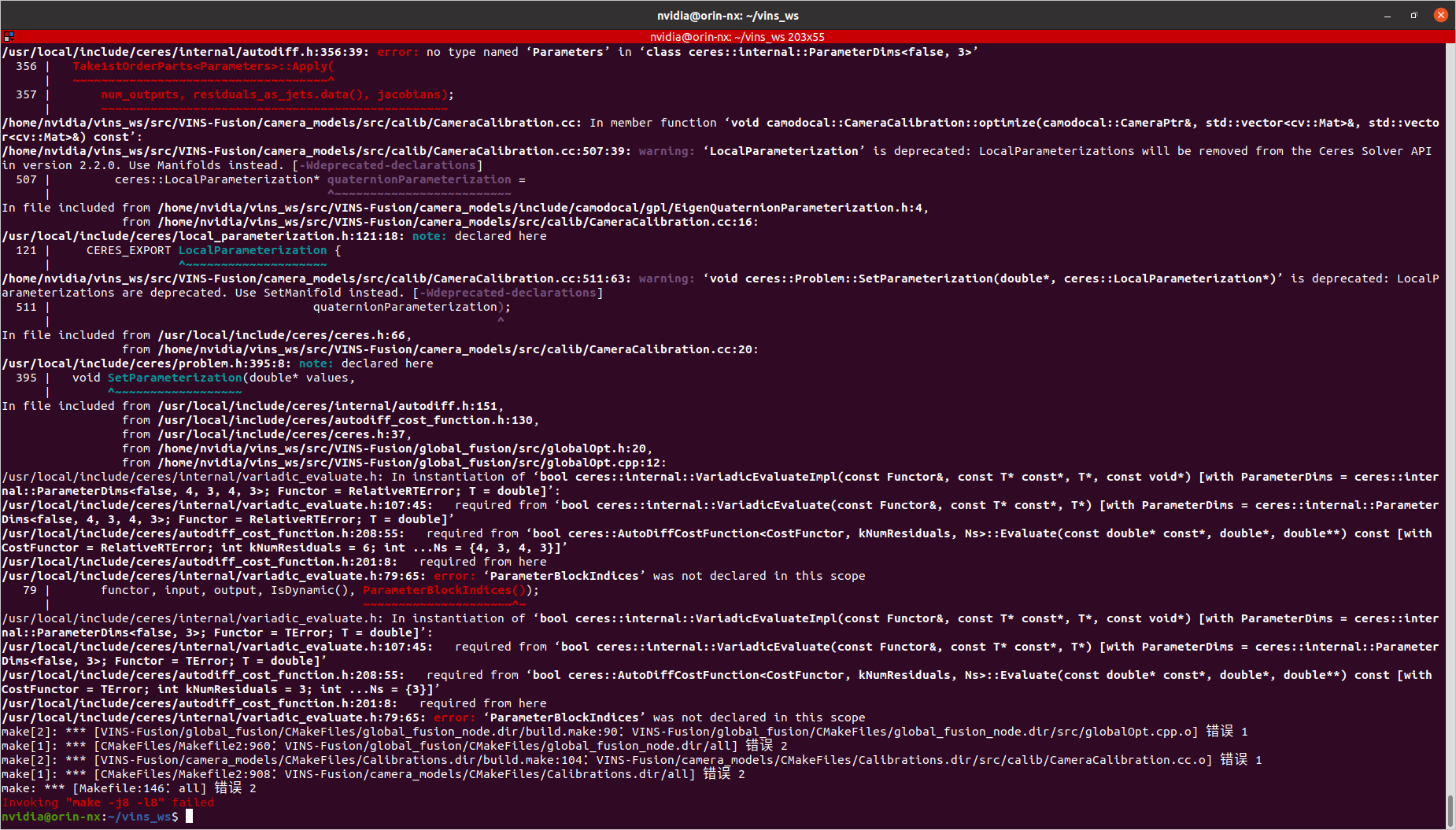
遇到了不少报错,参考以下内容可以基本解决前期的编译问题。
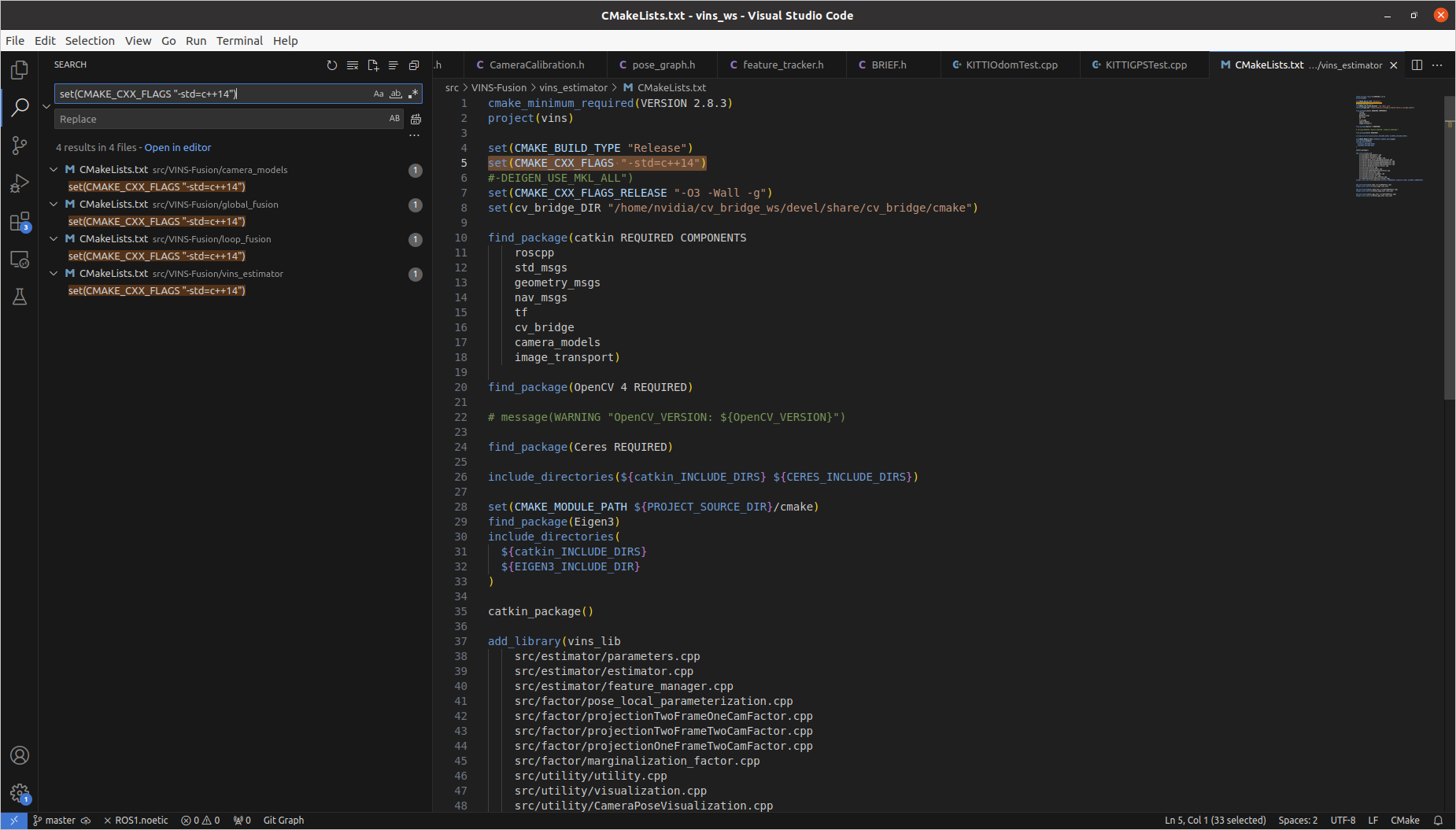
将c++11 修改为c++14
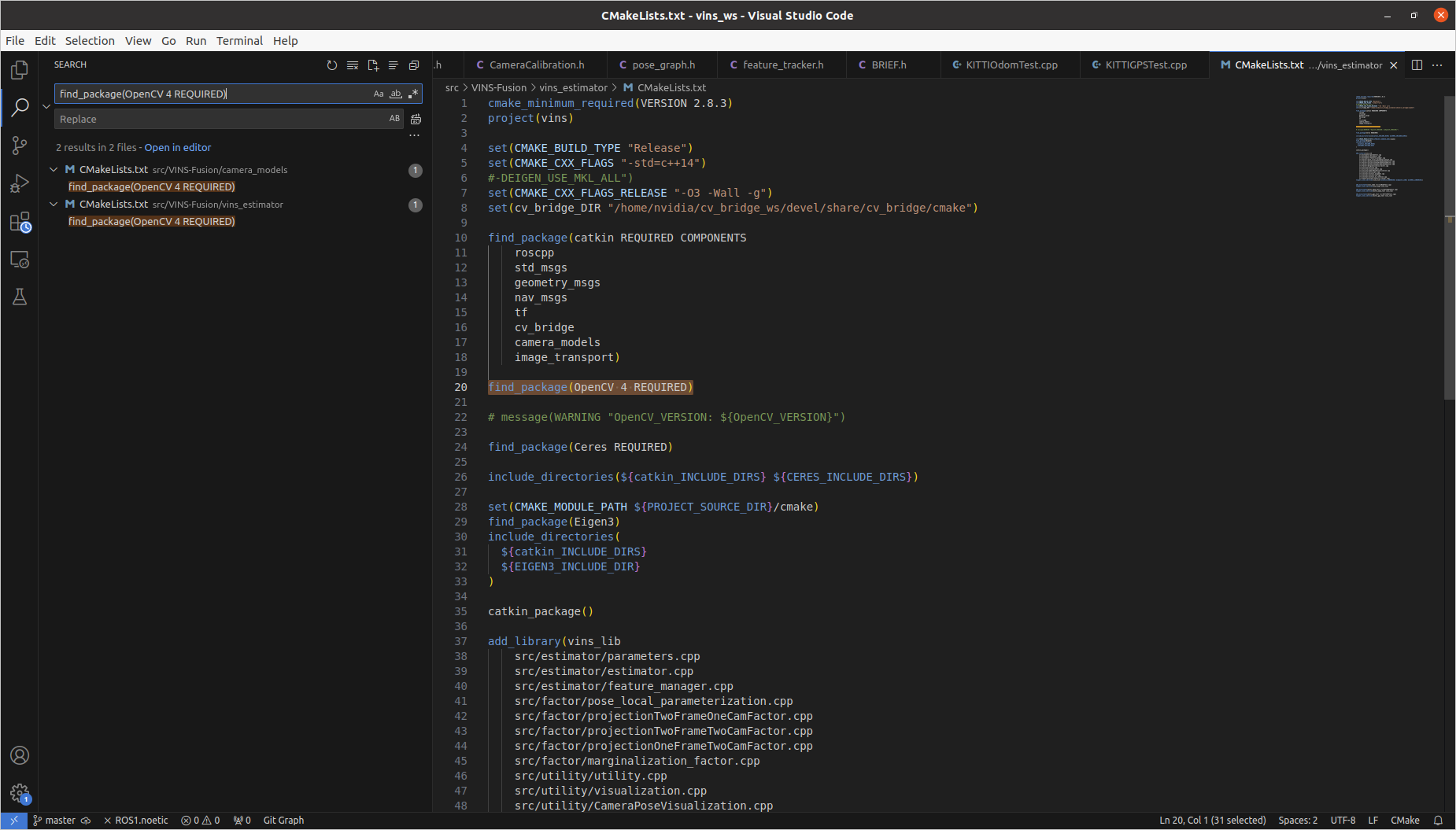
用VScode搜索set(CMAKE_CXX_FLAGS "-std=c++11"),全部替换为set(CMAKE_CXX_FLAGS "-std=c++14"),图中我已经全部替换过了。
指定find_package中的OpenCV的版本
用VScode搜索find_package(OpenCV REQUIRED),全部替换为find_package(OpenCV 4 REQUIRED),图中我已经全部替换过了。
添加头文件
camera_models>include>camodocal>chessboard>Chessboard.h中添加
cpp
#include <opencv2/imgproc/types_c.h>
#include <opencv2/calib3d/calib3d_c.h>在以下文件:
camera_models/include/camodocal/calib/CameraCalibration.h
loop_fusion/src/pose_graph.h
vins_estimator/src/featureTracker/feature_tracker.h
loop_fusion/src/ThirdParty/DVision/BRIEF.h
加入以下的头文件:
cpp
#include <opencv2/imgproc/types_c.h>
#include <opencv2/imgproc/imgproc_c.h>修改报错文件
在以下文件
VINS-Fusion/vins_estimator/src/KITTIGPSTest.cpp
VINS-Fusion/vins_estimator/src/KITTIOdomTest.cpp
其中,将 CV_LOAD_IMAGE_GRAYSCALE修改为cv::IMREAD_GRAYSCALE,同样的直接用VScode搜索 CV_LOAD_IMAGE_GRAYSCALE将其替换即可。
然后编译
bash
usr/bin/ld: warning: libopencv_video.so.4.2, needed by /home/nvidia/vins_ws/devel/lib/libvins_lib.so, may conflict with libopencv_video.so.405
/usr/bin/ld: warning: libopencv_imgcodecs.so.405, needed by /home/nvidia/vins_ws/devel/lib/libvins_lib.so, may conflict with libopencv_imgcodecs.so.4.2
/usr/bin/ld: warning: libopencv_core.so.405, needed by /usr/local/lib/libopencv_video.so.4.5.5, may conflict with libopencv_core.so.4.2
/usr/bin/ld: warning: libopencv_video.so.4.2, needed by /home/nvidia/vins_ws/devel/lib/libvins_lib.so, may conflict with libopencv_video.so.405
/usr/bin/ld: warning: libopencv_imgcodecs.so.405, needed by /home/nvidia/vins_ws/devel/lib/libvins_lib.so, may conflict with libopencv_imgcodecs.so.4.2
/usr/bin/ld: warning: libopencv_core.so.405, needed by /usr/local/lib/libopencv_video.so.4.5.5, may conflict with libopencv_core.so.4.2
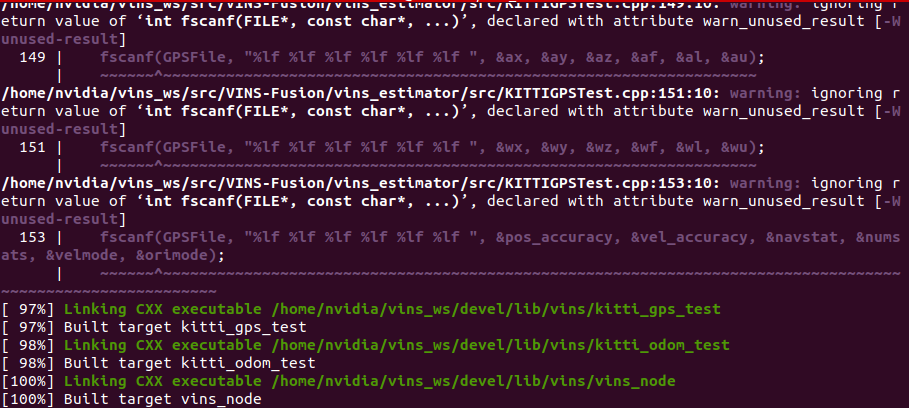
[ 98%] Built target kitti_odom_test
[ 98%] Built target kitti_gps_test
[100%] Linking CXX executable /home/nvidia/vins_ws/devel/lib/vins/vins_node
/usr/bin/ld: warning: libopencv_video.so.4.2, needed by /home/nvidia/vins_ws/devel/lib/libvins_lib.so, may conflict with libopencv_video.so.405
/usr/bin/ld: warning: libopencv_core.so.405, needed by /usr/local/lib/libopencv_video.so.4.5.5, may conflict with libopencv_core.so.4.2编译虽然通过了,但是有警告,这里是因为在链接过程中存在 OpenCV 库版本冲突。系统检测到两个不同版本的 OpenCV 库(4.2 和 4.5.5)被同时链接 。
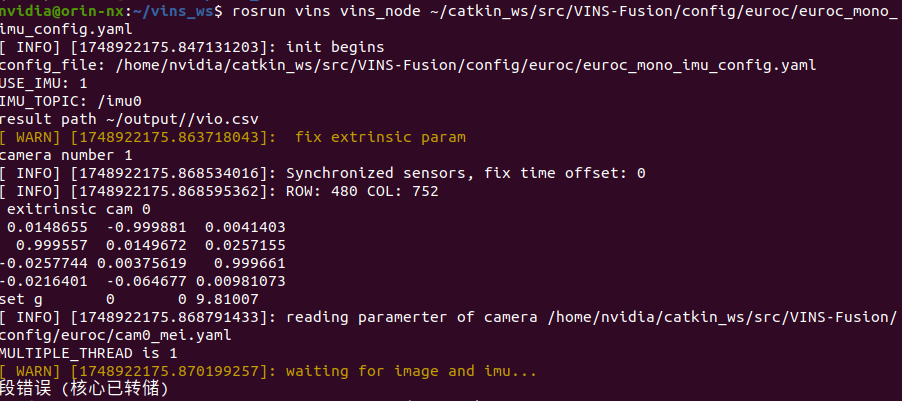
段错误
如果不解决上述OpenCV 库版本冲突问题,后续运行vins_node将会出现段错误:
解决OpenCV 库版本冲突问题。
最好的解决方法就是全部统一成一个OpenCV 4.5.5。
bash
# 卸载通过 apt 安装的 OpenCV
sudo apt purge -y '^libopencv.*' '^opencv.*'
# 清除残留配置文件
sudo rm -rf /usr/local/include/opencv* /usr/local/lib/libopencv* /usr/local/share/opencv* \
/usr/include/opencv* /usr/lib/x86_64-linux-gnu/libopencv* \
~/.local/lib/python*/*/site-packages/cv2*
# 更新系统库缓存
sudo ldconfig
# 更新下
sudo apt-get update
sudo apt-get upgrade
# 下载Opencv 4.5.5源码
wget https://github.com/opencv/opencv/archive/refs/tags/4.5.5.zip
# 解压
unzip opencv-4.5.5.zip
# 安装依赖
sudo apt-get install cmake
sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
sudo apt-get install libgtk2.0-dev
sudo apt-get install pkg-config
# 编译安装
mkdir build
cd build
cmake -D WITH_TBB=ON -D WITH_EIGEN=ON -D OPENCV_GENERATE_PKGCONFIG=ON -D BUILD_DOCS=ON -D BUILD_TESTS=OFF -D BUILD_PERF_TESTS=OFF -D BUILD_EXAMPLES=OFF -D WITH_OPENCL=OFF -D WITH_CUDA=OFF -D BUILD_opencv_gpu=OFF -D BUILD_opencv_gpuarithm=OFF -D BUILD_opencv_gpubgsegm=O -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local ..
make -j8
sudo make install
# 环境配置
sudo gedit /etc/ld.so.conf.d/opencv.conf
# 添加以下路径
/usr/local/lib
# 保存后,终端执行
sudo ldconfig
# 更新路径
sudo gedit /etc/bash.bashrc
# 最后添加
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
# 保存后,终端执行
source /etc/bash.bashrc
sudo updatedb然后编译Vins Fusion 发现没有 cv_bridge
bash
ither need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/noetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "cv_bridge" with
any of the following names:
cv_bridgeConfig.cmake
cv_bridge-config.cmake
Add the installation prefix of "cv_bridge" to CMAKE_PREFIX_PATH or set
"cv_bridge_DIR" to a directory containing one of the above files. If
"cv_bridge" provides a separate development package or SDK, be sure it has
been installed.
Call Stack (most recent call first):
VINS-Fusion/loop_fusion/CMakeLists.txt:9 (find_package)
-- Configuring incomplete, errors occurred!
See also "/home/nvidia/vins_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/nvidia/vins_ws/build/CMakeFiles/CMakeError.log".
Invoking "cmake" failed如果用这条ROS相关的安装cv_bridge的指令还会报错:
bash
# 安装 ROS Noetic 的 cv_bridge
sudo apt-get install ros-noetic-cv-bridge原因是系统安装了OpenCV 4.5.5,但通过ROS官方源安装的cv_bridge是针对OpenCV 4.2编译的。而我们的代码需要OpenCV 4.5.5,因此可能需要重新编译cv_bridge以匹配我们安装的OpenCV版本。
重新编译cv_bridge以匹配OpenCV 4.5.5版本
bash
# 1. 卸载旧版本(重要!)
sudo apt remove ros-noetic-cv-bridge
# 2. 创建工作空间
mkdir -p ~/cv_bridge_ws/src
cd ~/cv_bridge_ws/src
# 3. 获取vision_opencv源码(noetic分支)
git clone -b noetic https://github.com/ros-perception/vision_opencv.git
# 4. 关键:修改编译配置
sed -i 's/find_package(OpenCV 3 REQUIRED)/find_package(OpenCV 4.5 REQUIRED)/g' vision_opencv/cv_bridge/CMakeLists.txt
# 5. 编译安装
cd ~/cv_bridge_ws
catkin config -DCMAKE_BUILD_TYPE=Release -DOpenCV_DIR=/path/to/opencv4.5.5/build
catkin build cv_bridge
# 6. 添加环境变量(永久生效)
echo "source ~/cv_bridge_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc如果安装完还是报错:
bash
# 查找 cv_bridge 的实际安装位置
find / -name "*cv_bridge*Config.cmake" 2>/dev/null得到下面这个路径
/home/nvidia/cv_bridge_ws/devel/share/cv_bridge/cmake/cv_bridgeConfig.cmake
在VINS-Fusion的CMakeLists.txt中(具体是loop_fusion/CMakeLists.txt)的find_package(cv_bridge)之前加入:
bash
set(cv_bridge_DIR "/home/nvidia/cv_bridge_ws/devel/share/cv_bridge/cmake")最后编译成功,没有warning也没有报错:
最后结果:
bash
roslaunch vins vins_rviz.launch
rosrun vins vins_node src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml
rosrun loop_fusion loop_fusion_node src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml
# 数据集去Vins-Fusion github官网上进行下载
rosbag play MH_01_easy.bag