【声呐图像处理】水下前视声呐(FLS)图像拼接与建图全流程解析
摘要:在浑浊的水下环境中,光学摄像头的可视范围极其有限,而前视声呐(Forward-Looking Sonar, FLS)凭借其不受光照影响的声学成像特性,成为了水下感知的核心传感器。本文将深入剖析一套完整的前视声呐图像拼接技术方案,从声呐成像机理、抗噪鲁棒的频域配准算法,到基于图优化的全局一致性校正,带你一探水下声学地图构建的硬核技术。
1. 为什么需要声呐拼接?
在水下船体检查、港口安防、海底考古等任务中,浑浊的水体使得光学图像往往"伸手不见五指"。前视声呐(FLS,如DIDSON, ARIS, BlueView等设备)利用高频声波成像,能够以接近视频的帧率提供高分辨率的二维声学图像。
然而,FLS单帧图像存在明显的局限性:
- 视场(FOV)有限:通常只有几十度,难以窥探全貌。
- 信噪比(SNR)低:图像充斥着散斑噪声(Speckle Noise)。
- 非均匀分辨率:近处分辨率高,远处分辨率急剧下降。
为了获得大范围的场景地图,我们需要将序列声呐图像进行高精度的配准(Registration)与融合(Blending) ,构建出一幅全景声学马赛克(Mosaic)。
2. 理解声呐成像几何
在处理FLS数据前,首先要理解其成像模型。与光学相机不同,FLS的原始数据是基于极坐标系 (r,θ)(r, \theta)(r,θ) 的。
- 成像原理 :声呐发射声波并接收回波,像素点代表的是回波强度。由于FLS垂直方向的波束宽度较窄(通常为7°-10°),在拼接算法中,通常采用近似正交投影模型。
- 笛卡尔转换 :为了便于人眼观察和地图构建,通常需要将原始极坐标数据转换为笛卡尔坐标系 (x,y)(x, y)(x,y)。
- 简化模型 :假设海底或扫描平面近似平坦,这种简化允许我们使用2D刚体变换(平移 tx,tyt_x, t_ytx,ty + 旋转 θ\thetaθ)来描述两帧图像之间的运动,这大大降低了计算复杂度,为实时处理提供了可能。
3. 核心难点突破:鲁棒的图像配准
图像配准是拼接流程中最关键的一步。在光学图像中常用的特征点法(如SIFT, SURF, ORB)在声呐图像上往往失效,原因在于声呐图像的特征极其不稳定,且受噪声干扰严重。
工程实践中,基于傅里叶域(Fourier-based)的区域匹配方法表现出了更强的鲁棒性。
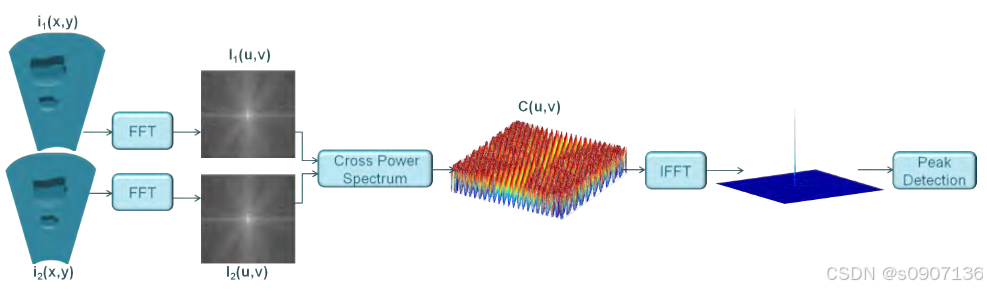
3.1 核心算法:相位相关(Phase Correlation)
相位相关法利用傅里叶变换的平移特性,将空域中的图像平移转换为频域中的线性相位差。
设两幅图像 i1i_1i1 和 i2i_2i2 存在平移 (tx,ty)(t_x, t_y)(tx,ty),其傅里叶变换关系为:
F{i2(x,y)}=F{i1(x,y)}⋅e−j(utx+vty) \mathcal{F}\{i_2(x, y)\} = \mathcal{F}\{i_1(x, y)\} \cdot e^{-j(u t_x + v t_y)} F{i2(x,y)}=F{i1(x,y)}⋅e−j(utx+vty)
通过计算归一化互功率谱 并进行逆变换,理论上可以得到一个脉冲函数(Delta function),该脉冲的坐标即为平移量。
3.2 针对声呐图像的特殊处理
直接使用相位相关法处理原始声呐图像效果并不理想,需要引入以下改进策略:
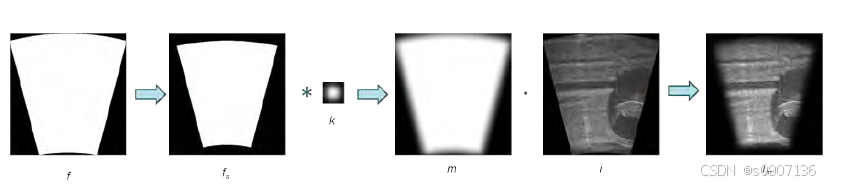
- 边缘遮罩(Masking) :
FLS图像在笛卡尔坐标系下呈扇形,边缘明显的硬切变会在频域产生强烈的"十字"干扰(频谱泄露)。- 解决方案:在进行FFT变换前,对图像应用高斯平滑边缘遮罩,消除边界效应,让算法聚焦于图像内容的纹理。

-
解耦旋转与平移 :
传统的Fourier-Mellin变换虽然可以估计旋转,但对噪声敏感。一种更高效的策略是:
- 利用极坐标特性 :声呐的物理旋转在原始极坐标图像上表现为角度轴方向的"平移"。
- 操作流程 :先在极坐标图像上应用相位相关估计旋转角 θ\thetaθ,对图像进行旋转补偿后,再在笛卡尔坐标系下估计平移量 (tx,ty)(t_x, t_y)(tx,ty)。
-
自适应频率滤波 :
为了应对低信噪比,可以根据峰值旁瓣比(PSR) 自动调整低通滤波器的截止频率。当相关峰不明显时,自动滤除高频噪声,保留低频的结构信息。
4. 全局一致性:图优化 SLAM
仅仅依靠两帧之间的成对配准,随着路径延长,累积误差(Drift)会不可避免地导致地图"弯曲"或错位。为了解决这个问题,需要引入图优化(Graph Optimization) 技术。
4.1 位姿图构建 (Front-end)
我们将图像拼接问题建模为一个位姿图(Pose Graph):
- 节点 (Vertices) :代表每一帧声呐图像的全局位姿 (x,y,θ)(x, y, \theta)(x,y,θ)。
- 边 (Edges) :代表两帧之间的相对约束。
- 时序边:相邻的连续帧之间的配准结果。
- 回环边 (Loop Closure):这是消除累积误差的关键。系统需要检测非相邻但空间上重叠的帧(例如机器人在"割草机"路径中回到了之前的区域),并建立约束。
4.2 权重与不确定性
并非所有的配准结果都同等可信。在优化中,需要给每条边分配一个信息矩阵(Information Matrix)。
- 启发式策略:通过分析相位相关输出的"相关峰"形态。如果峰值尖锐且突出,说明配准非常准确,给予高权重;如果峰值发散或有多个峰,说明存在歧义,降低权重。
4.3 后端优化 (Back-end)
使用通用的图优化库(如 G2O),通过非线性最小二乘法最小化所有边的误差,得到每一帧图像在全局坐标系下的最优位置。
5. 马赛克渲染与图像增强
当所有图像的位姿确定后,最后一步是将它们融合到一张大图上。
5.1 强度平均法(Intensity Averaging)
在光学拼接中,常使用"最佳缝合线"算法来避免重影。但在声呐拼接中,多帧平均反而是更好的选择。
- 原理 :声呐图像的散斑噪声是随机的。通过将覆盖同一区域的多帧图像像素值进行平均,可以利用噪声的去相关性,显著提高信噪比(SNR)。
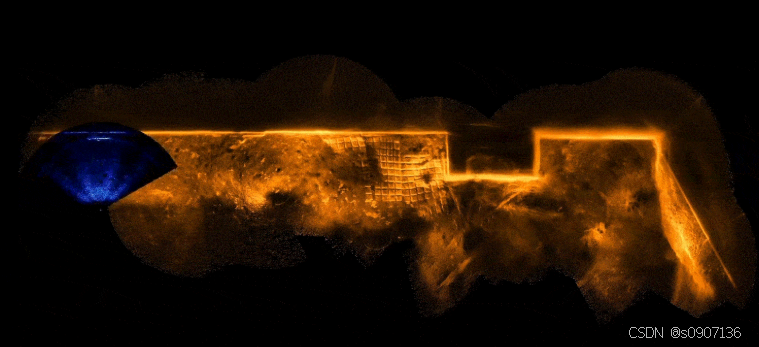
- 效果:融合后的地图往往比单帧原始图像更加清晰,海底的纹理、链条的细节会"浮现"出来。
5.2 图像预处理增强
为了防止拼接后的图像出现亮度不均或模糊,建议在融合前进行以下处理:
- CLAHE(限制对比度自适应直方图均衡化):解决声呐图像动态范围低、局部过暗或过亮的问题。
- 盲区剔除:声呐图像常包含无效的黑色背景或声学阴影。通过纹理分析生成掩膜(Mask),在融合时剔除这些无效像素,防止它们拉低有效区域的亮度。
6. 典型应用场景
这就套技术框架在实际应用中表现出了强大的适应性:
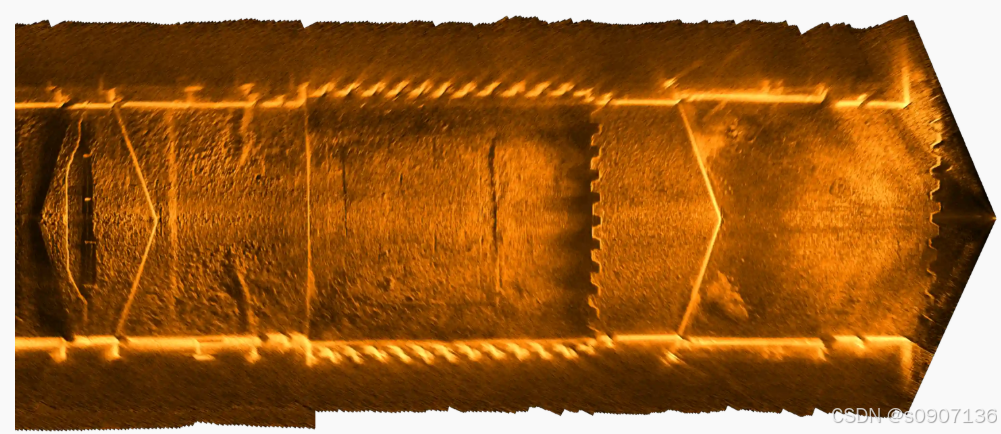
- 船体探伤:AUV贴近船底进行扫描,通过拼接技术,可以将破碎的局部视野整合成完整的船底声学图,便于发现附着物或损伤。
- 港口监控与测绘:在浑浊的港口水域,利用声呐拼图生成海底地貌图,用于辅助导航或寻找失物。
- 水下考古:对于沉船遗址,通过多角度扫描并拼接,能够还原出令人惊叹的遗址全貌,且细节清晰度远超单次扫描。
---
7. 总结
水下前视声呐图像拼接技术,本质上是一个针对声学图像特性的视觉SLAM变种。其核心在于:
- 放弃特征点:拥抱更鲁棒的频域配准方法。
- 简化模型:利用极坐标特性快速估计旋转。
- 利用噪声:通过多帧平均变废为宝,提升画质。
参考文献
- Hurtós, N. (2014). Forward-Looking Sonar Mosaicing for Underwater Environments. Doctoral Thesis, University of Girona.