一.膨胀
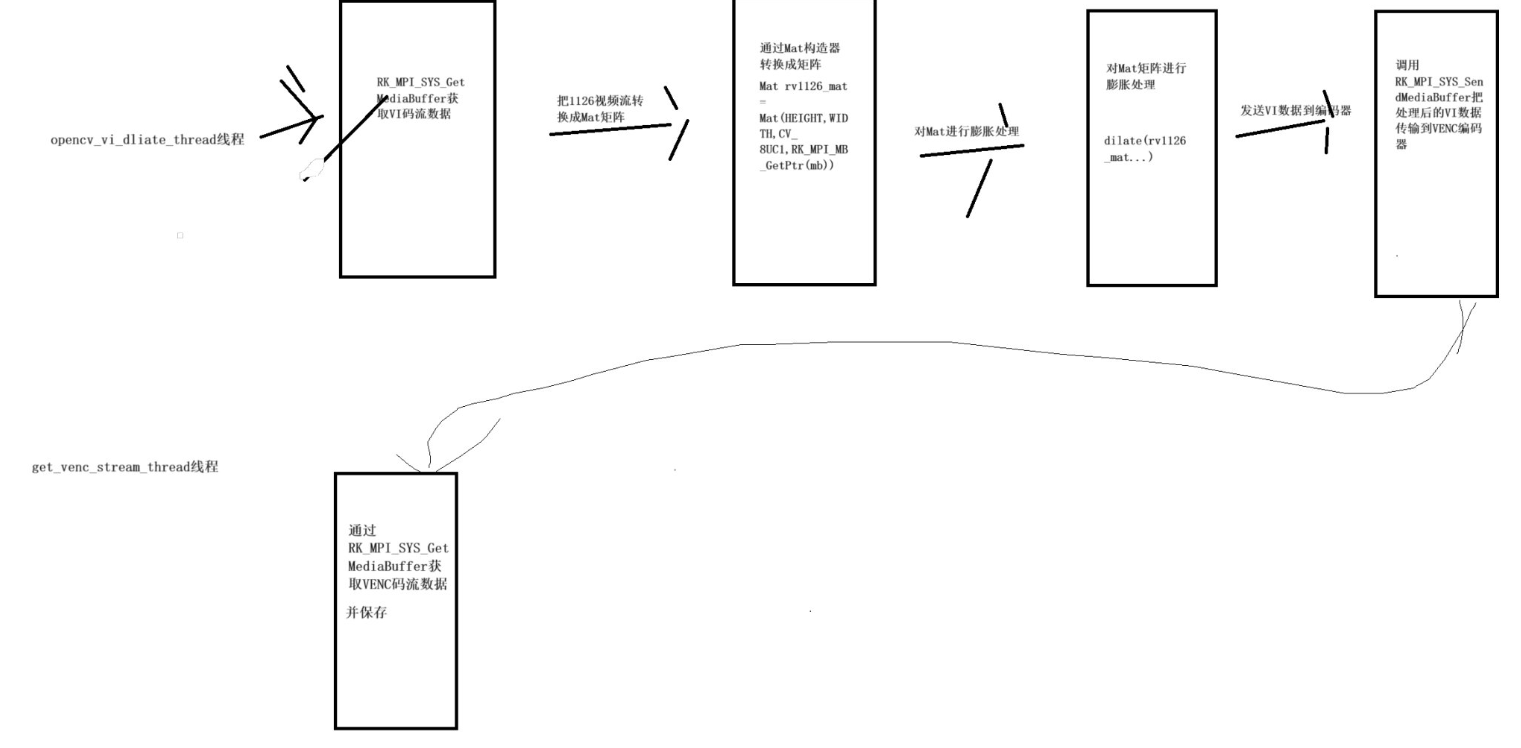
1.视频流的膨胀流程
之前膨胀都是在图片中进行的,现在要在视频中进行也简单,大概思路就是:获取VI数据,然后把VI数据给Mat化发给VENC模块,然后VENC模块获取,这样就完成了。流程图:
2.代码具体实现
// Copyright 2020 Fuzhou Rockchip Electronics Co., Ltd. All rights reserved.
// Use of this source code is governed by a BSD-style license that can be
// found in the LICENSE file.
#include <assert.h>
#include <fcntl.h>
#include <getopt.h>
#include <opencv2/imgproc.hpp>
#include <pthread.h>
#include <signal.h>
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include <time.h>
#include <unistd.h>
// #include "common/sample_common.h"
#include "rkmedia_api.h"
#include <opencv2/core.hpp>
// #include <opencv2/imgoroc.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
#define CAMERA_PATH "rkispp_scale0"
#define CAMERA_ID 0
#define CAMERA_CHN 0
#define VENC_CHN 0
#define WIDTH 1920
#define HEIGHT 1080
void *opencv_vi_dliate_thread(void *args)
{
pthread_detach(pthread_self());
MEDIA_BUFFER mb = NULL;
while (1)
{
mb = RK_MPI_SYS_GetMediaBuffer(RK_ID_VI, CAMERA_CHN, -1);//获取VI数据
if (!mb)
{
printf("Get Vi stream break...\n");
break;
}
Mat rv1126_vi_mat = Mat(HEIGHT, WIDTH, CV_8UC1, RK_MPI_MB_GetPtr(mb)); //把VI数据转换成OPENCV的Mat矩阵
Mat rv1126_vi_structure = getStructuringElement(MORPH_RECT, Size(15, 15));//获取内核,内核的形状是矩形,长度大小是15 * 15
dilate(rv1126_vi_mat, rv1126_vi_mat, rv1126_vi_structure);//对Mat矩阵进行dilate膨胀
RK_MPI_SYS_SendMediaBuffer(RK_ID_VENC, VENC_CHN, mb);//把膨胀后的数据传输到VENC编码器
RK_MPI_MB_ReleaseBuffer(mb);//释放资源
}
return NULL;
}
void *get_venc_stream_thread(void * args)
{
pthread_detach(pthread_self());
MEDIA_BUFFER mb = NULL;
FILE *opencv_dliate_file = fopen("test_opencv_dliate.h264", "w+");
while (1)
{
mb = RK_MPI_SYS_GetMediaBuffer(RK_ID_VENC, VENC_CHN, -1);
if (!mb)
{
printf("Get Venc stream break...\n");
break;
}
printf("Get Dlite_Venc Stream Success...\n");
fwrite(RK_MPI_MB_GetPtr(mb), RK_MPI_MB_GetSize(mb), 1, opencv_dliate_file);
RK_MPI_MB_ReleaseBuffer(mb);
}
return NULL;
}
int main()
{
int ret;
VI_CHN_ATTR_S vi_chn_attr;
vi_chn_attr.pcVideoNode = CAMERA_PATH; // Path
vi_chn_attr.u32Width = 1920; // Width
vi_chn_attr.u32Height = 1080; // Height
vi_chn_attr.enPixFmt = IMAGE_TYPE_NV12; // ImageType
vi_chn_attr.enBufType = VI_CHN_BUF_TYPE_MMAP; // BufType
vi_chn_attr.u32BufCnt = 3; // Cnt
vi_chn_attr.enWorkMode = VI_WORK_MODE_NORMAL; // Mode
ret = RK_MPI_VI_SetChnAttr(CAMERA_ID, CAMERA_CHN, &vi_chn_attr);
if (ret)
{
printf("Vi Set Attr Failed.....\n");
return 0;
}
else
{
printf("Vi Set Attr Success.....\n");
}
ret = RK_MPI_VI_EnableChn(CAMERA_ID, CAMERA_CHN);
if (ret)
{
printf("Vi Enable Attr Failed.....\n");
return 0;
}
else
{
printf("Vi Enable Attr Success.....\n");
}
VENC_CHN_ATTR_S venc_chn_attr;
memset(&venc_chn_attr, 0, sizeof(VENC_CHN_ATTR_S));
venc_chn_attr.stVencAttr.u32PicWidth = 1920;
venc_chn_attr.stVencAttr.u32PicHeight = 1080;
venc_chn_attr.stVencAttr.u32VirWidth = 1920;
venc_chn_attr.stVencAttr.u32VirHeight = 1080;
venc_chn_attr.stVencAttr.imageType = IMAGE_TYPE_NV12;
venc_chn_attr.stVencAttr.enType = RK_CODEC_TYPE_H264;
venc_chn_attr.stVencAttr.u32Profile = 66;
venc_chn_attr.stRcAttr.enRcMode = VENC_RC_MODE_H264CBR;
venc_chn_attr.stRcAttr.stH264Cbr.u32Gop = 25;
venc_chn_attr.stRcAttr.stH264Cbr.u32BitRate = 1920 * 1080 * 3;
venc_chn_attr.stRcAttr.stH264Cbr.fr32DstFrameRateDen = 1;
venc_chn_attr.stRcAttr.stH264Cbr.fr32DstFrameRateNum = 25;
venc_chn_attr.stRcAttr.stH264Cbr.u32SrcFrameRateDen = 1;
venc_chn_attr.stRcAttr.stH264Cbr.u32SrcFrameRateNum = 25;
ret = RK_MPI_VENC_CreateChn(VENC_CHN, &venc_chn_attr);
if (ret)
{
printf("ERROR: Create venc failed!\n");
exit(0);
}
ret = RK_MPI_VI_StartStream(CAMERA_ID, CAMERA_CHN);
if (ret)
{
printf("start vi stream failed.....\n");
}
else
{
printf("start vi stream success.....\n");
}
pthread_t pid;
pthread_create(&pid, NULL, opencv_vi_dliate_thread, NULL);//膨胀处理线程
pthread_create(&pid, NULL, get_venc_stream_thread, NULL);//获取VENC线程
while (1)
{
sleep(2);
}
RK_MPI_VENC_DestroyChn(VENC_CHN);
RK_MPI_VI_DisableChn(CAMERA_ID, CAMERA_CHN);
return 0;
}3.效果图

二.腐蚀
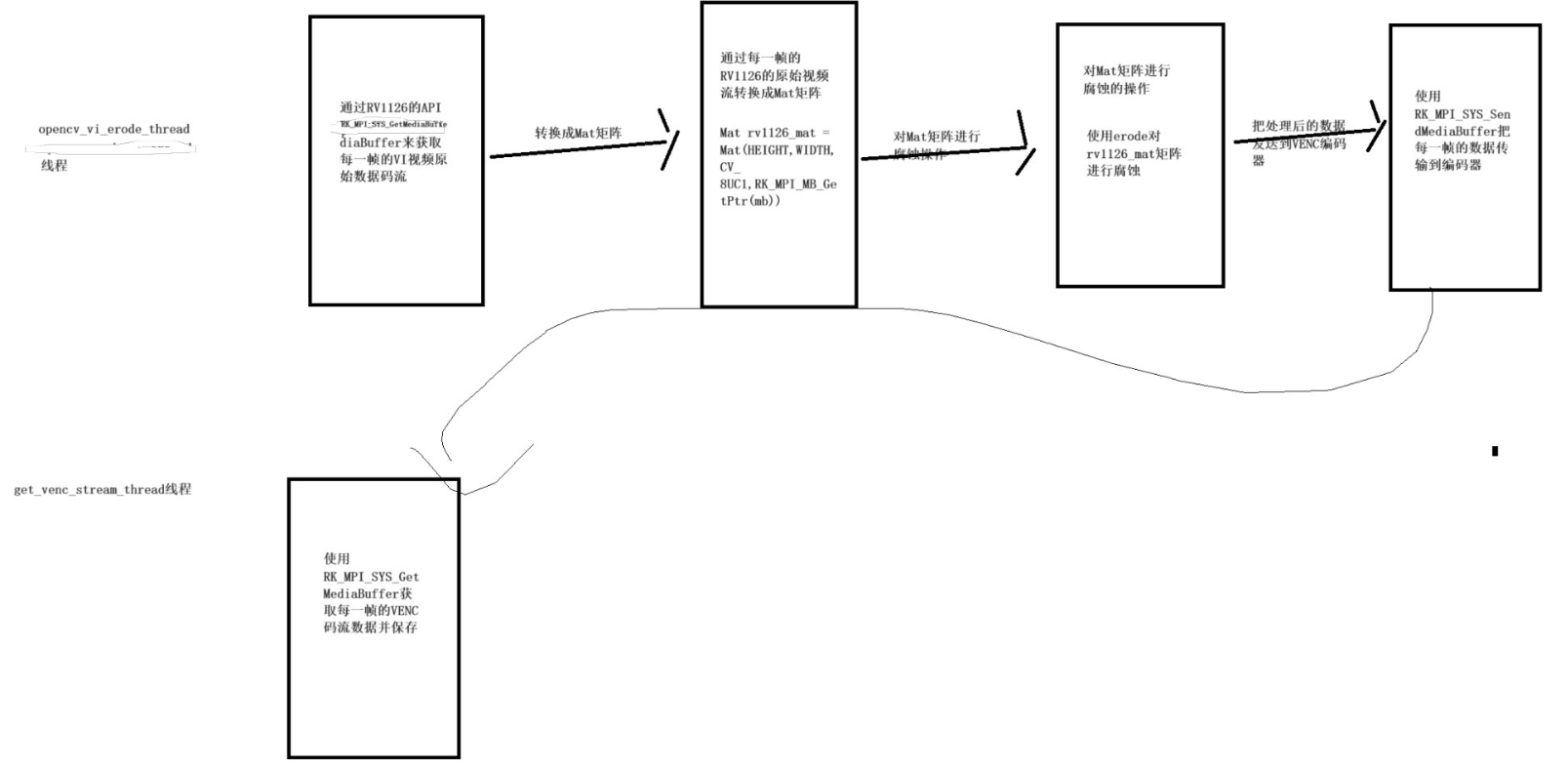
1.视频流的腐蚀流程
原理和膨胀一样,那我从上面再复制一下。大概思路就是:获取VI数据,然后把VI数据给Mat化发给VENC模块,然后VENC模块获取,这样就完成了。流程图:
2.代码具体实现
// Copyright 2020 Fuzhou Rockchip Electronics Co., Ltd. All rights reserved.
// Use of this source code is governed by a BSD-style license that can be
// found in the LICENSE file.
#include <assert.h>
#include <fcntl.h>
#include <getopt.h>
#include <opencv2/imgproc.hpp>
#include <pthread.h>
#include <signal.h>
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include <time.h>
#include <unistd.h>
// #include "common/sample_common.h"
#include "rkmedia_api.h"
#include <opencv2/core.hpp>
// #include <opencv2/imgoroc.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
#define CAMERA_PATH "rkispp_scale0"
#define CAMERA_ID 0
#define CAMERA_CHN 0
#define VENC_CHN 0
#define WIDTH 1920
#define HEIGHT 1080
void *opencv_vi_erode_thread(void *args)
{
pthread_detach(pthread_self());
MEDIA_BUFFER mb = NULL;
while (1)
{
mb = RK_MPI_SYS_GetMediaBuffer(RK_ID_VI, CAMERA_CHN, -1);//获取VI数据
if (!mb)
{
printf("Get Vi Stream break.....\n");
break;
}
Mat rv1126_mat = Mat(HEIGHT, WIDTH, CV_8UC1, RK_MPI_MB_GetPtr(mb));//把VI数据转换成OPENCV的Mat矩阵
Mat rv1126_structure = getStructuringElement(MORPH_RECT, Size(15, 15));//获取内核,内核的形状是矩形,长度大小是15 * 15
erode(rv1126_mat, rv1126_mat, rv1126_structure);//对Mat矩阵进行erode腐蚀
RK_MPI_SYS_SendMediaBuffer(RK_ID_VENC, VENC_CHN, mb);//把腐蚀后的数据传输到VENC编码器
RK_MPI_MB_ReleaseBuffer(mb);//释放资源
}
return NULL;
}
void *get_venc_stream_thread(void *args)
{
pthread_detach(pthread_self());
MEDIA_BUFFER mb = NULL;
FILE * opencv_erode_h264_file = fopen("opencv_erode.h264", "w+");
while (1)
{
mb = RK_MPI_SYS_GetMediaBuffer(RK_ID_VENC, VENC_CHN, -1);
if (!mb)
{
printf("Get Venc Stream break.....\n");
break;
}
printf("Get ERODE_STREAM Success...\n");
fwrite(RK_MPI_MB_GetPtr(mb), RK_MPI_MB_GetSize(mb), 1, opencv_erode_h264_file);
RK_MPI_MB_ReleaseBuffer(mb);
}
return NULL;
}
int main()
{
int ret;
VI_CHN_ATTR_S vi_chn_attr;
vi_chn_attr.pcVideoNode = CAMERA_PATH; // Path
vi_chn_attr.u32Width = 1920; // Width
vi_chn_attr.u32Height = 1080; // Height
vi_chn_attr.enPixFmt = IMAGE_TYPE_NV12; // ImageType
vi_chn_attr.enBufType = VI_CHN_BUF_TYPE_MMAP; // BufType
vi_chn_attr.u32BufCnt = 3; // Cnt
vi_chn_attr.enWorkMode = VI_WORK_MODE_NORMAL; // Mode
ret = RK_MPI_VI_SetChnAttr(CAMERA_ID, CAMERA_CHN, &vi_chn_attr);
if (ret)
{
printf("Vi Set Attr Failed.....\n");
return 0;
}
else
{
printf("Vi Set Attr Success.....\n");
}
ret = RK_MPI_VI_EnableChn(CAMERA_ID, CAMERA_CHN);
if (ret)
{
printf("Vi Enable Attr Failed.....\n");
return 0;
}
else
{
printf("Vi Enable Attr Success.....\n");
}
VENC_CHN_ATTR_S venc_chn_attr;
memset(&venc_chn_attr, 0, sizeof(VENC_CHN_ATTR_S));
venc_chn_attr.stVencAttr.u32PicWidth = 1920;
venc_chn_attr.stVencAttr.u32PicHeight = 1080;
venc_chn_attr.stVencAttr.u32VirWidth = 1920;
venc_chn_attr.stVencAttr.u32VirHeight = 1080;
venc_chn_attr.stVencAttr.imageType = IMAGE_TYPE_NV12;
venc_chn_attr.stVencAttr.enType = RK_CODEC_TYPE_H264;
venc_chn_attr.stVencAttr.u32Profile = 66;
venc_chn_attr.stRcAttr.enRcMode = VENC_RC_MODE_H264CBR;
venc_chn_attr.stRcAttr.stH264Cbr.u32Gop = 25;
venc_chn_attr.stRcAttr.stH264Cbr.u32BitRate = 1920 * 1080 * 3;
venc_chn_attr.stRcAttr.stH264Cbr.fr32DstFrameRateDen = 1;
venc_chn_attr.stRcAttr.stH264Cbr.fr32DstFrameRateNum = 25;
venc_chn_attr.stRcAttr.stH264Cbr.u32SrcFrameRateDen = 1;
venc_chn_attr.stRcAttr.stH264Cbr.u32SrcFrameRateNum = 25;
ret = RK_MPI_VENC_CreateChn(VENC_CHN, &venc_chn_attr);
if (ret)
{
printf("ERROR: Create venc failed!\n");
exit(0);
}
ret = RK_MPI_VI_StartStream(CAMERA_ID, CAMERA_CHN);
if (ret)
{
printf("ERROR: Start Vi failed.....!\n");
return -1;
}
else
{
printf("SUCCESS: Start Vi success.....!\n");
}
pthread_t pid;
pthread_create(&pid, NULL, opencv_vi_erode_thread, NULL);//腐蚀处理线程
pthread_create(&pid, NULL, get_venc_stream_thread, NULL);//获取VENC线程
while (1)
{
sleep(2);
}
RK_MPI_VENC_DestroyChn(VENC_CHN);
RK_MPI_VI_DisableChn(CAMERA_ID, CAMERA_CHN);
return 0;
}3.效果图
