摘要
随着工业4.0浪潮的推进,传统的自动化技术正经历着一场由人工智能(AI)驱动的深刻变革。本文旨在全面探讨AI在自动化与机器人技术中的前沿应用。通过回顾自动化技术从机械化到智能化的演变历程,深入剖析机器人感知、决策与执行系统的技术内核。重点阐述了计算机视觉、多模态传感器融合以及强化学习在解决非结构化环境问题中的关键作用。同时,本文详细分析了AI驱动的机器人在工业制造、自动驾驶及服务领域的实际应用案例,探讨了当前面临的Sim2Real鸿沟、系统安全性及伦理挑战,并对跨领域应用及自适应进化的未来趋势进行了展望。本文结合理论推导与代码实例,旨在为相关领域的研究者与工程师提供具有参考价值的技术图景。
关键词:人工智能;机器人学;自动化;深度学习;强化学习;计算机视觉;工业4.0
1. 引言 (Introduction)
1.1 自动化与机器人技术的历史发展与现状
自动化(Automation)一词源于希腊语"Automatos",意为自我行动。从古希腊的希罗(Hero of Alexandria)设计的自动门,到18世纪瓦特蒸汽机引入离心调速器实现闭环控制,自动化的历史是人类追求效率与解放双手的历史。
进入20世纪,自动化技术经历了三次重大飞跃:
- 机械自动化(1920s):以福特T型车流水线为代表,通过凸轮、齿轮和连杆机构实现刚性自动化。
- 电气与电子自动化(1960s):继电器逻辑和PLC(可编程逻辑控制器)的出现,使得控制逻辑可以通过接线或梯形图进行修改。
- 数字化自动化(1990s-2010s):计算机数控(CNC)与工业机器人的普及,配合CAD/CAM软件,实现了制造的精确性。
现状是,尽管传统工业机器人在汽车焊接、喷涂等结构化场景中表现完美,但它们缺乏对环境的感知与理解能力。一旦工件位置发生微小偏移,或者环境光照变化,传统程序往往会失效。
1.2 AI与机器人结合的重要性和创新性
AI与机器人的结合,标志着认知自动化(Cognitive Automation)时代的到来。这种结合的重要性在于解决了传统机器人"手眼不协调"和"有脑无智"的痛点。
- 感知维度的创新:AI赋予了机器人理解语义的能力。例如,传统视觉只能判断像素差异,而AI视觉能理解"这是一个杯子,且它是易碎品"。
- 决策维度的创新:从基于规则(Rule-based)的确定性编程,转向基于数据(Data-driven)的概率性推理。
- 交互维度的创新:自然语言处理(NLP)技术使得人与机器人的交互不再依赖复杂的示教器,而是可以通过语音或手势直观完成。
2. 自动化与机器人的基本概念
2.1 自动化技术的起源与发展:从传统机械化到智能化
现代自动化系统的金字塔结构(ISA-95标准)正在被边缘计算和AI扁平化。
- 底层(Field Level):传感器与执行器。
- 控制层(Control Level):PLC/DCS,执行实时PID控制。
- 操作层(Supervisory Level):SCADA/HMI。
- 管理层(Management Level):MES/ERP。
AI正在渗透进入每一个层级,尤其是控制层。传统的PID控制算法:
u(t)=Kpe(t)+Ki∫e(t)dt+Kdde(t)dtu(t) = K_p e(t) + K_i \int e(t)dt + K_d \frac{de(t)}{dt}u(t)=Kpe(t)+Ki∫e(t)dt+Kddtde(t)
正在演变为基于神经网络的自适应控制,即 Kp,Ki,KdK_p, K_i, K_dKp,Ki,Kd 参数可以根据系统状态实时动态调整。
2.2 机器人学:机器人感知、决策与执行系统
机器人系统是一个典型的控制论系统,可以形式化为:
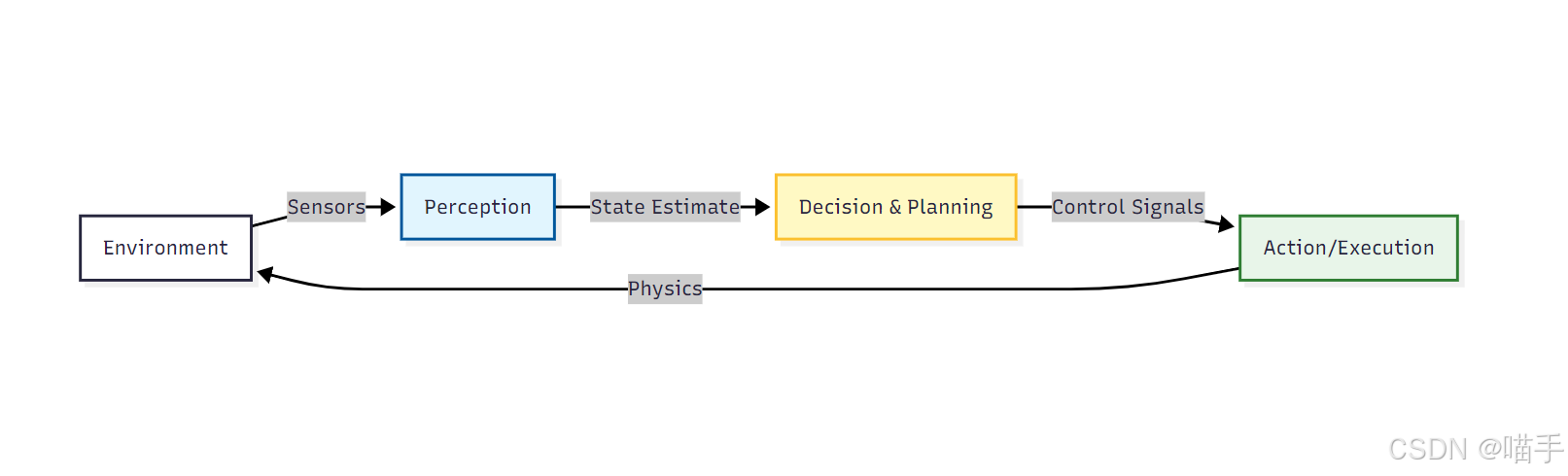
- 感知(Perception) :解决状态估计问题 P(xt∣z1:t,u1:t)P(x_t | z_{1:t}, u_{1:t})P(xt∣z1:t,u1:t)。
- 决策(Decision) :解决优化问题,寻找最优策略 π∗(s)\pi^*(s)π∗(s)。
- 执行(Execution):解决运动学与动力学问题。涉及正运动学(Forward Kinematics)和逆运动学(Inverse Kinematics)。
3. AI与机器人感知系统
3.1 计算机视觉:机器人如何理解周围环境
计算机视觉是机器人的"眼睛"。现代机器人视觉极大依赖于卷积神经网络(CNN)和Transformer架构(如ViT)。
3.1.1 核心任务
- 物体检测 (Object Detection):如YOLOv8,RetinaNet。不仅定位,还需分类。
- 位姿估计 (6D Pose Estimation):确定物体在三维空间中的位置(x, y, z)和姿态(roll, pitch, yaw),这是机械臂抓取的关键。
3.1.2 视觉算法原理与代码示例
卷积层通过滤波器提取图像特征。以下是使用PyTorch构建一个用于机器人视觉分类的基础CNN模块代码:
示例代码如下:
python
import torch
import torch.nn as nn
import torch.nn.functional as F
class RoboticVisionNet(nn.Module):
"""
一个用于机器人末端执行器相机的简单视觉分类网络
输入: 3通道RGB图像 (如 128x128)
输出: 物体类别概率
"""
def __init__(self, num_classes=10):
super(RoboticVisionNet, self).__init__()
# 卷积块 1: 提取低级特征 (边缘, 角点)
self.conv1 = nn.Conv2d(3, 32, kernel_size=3, padding=1)
self.bn1 = nn.BatchNorm2d(32)
# 卷积块 2: 提取中级特征 (纹理, 形状部分)
self.conv2 = nn.Conv2d(32, 64, kernel_size=3, padding=1)
self.bn2 = nn.BatchNorm2d(64)
# 卷积块 3: 提取高级特征 (语义对象)
self.conv3 = nn.Conv2d(64, 128, kernel_size=3, padding=1)
self.bn3 = nn.BatchNorm2d(128)
self.pool = nn.MaxPool2d(2, 2)
self.global_pool = nn.AdaptiveAvgPool2d((1, 1)) # 全局平均池化,适应不同尺寸输入
self.fc = nn.Linear(128, num_classes)
def forward(self, x):
x = self.pool(F.relu(self.bn1(self.conv1(x))))
x = self.pool(F.relu(self.bn2(self.conv2(x))))
x = self.pool(F.relu(self.bn3(self.conv3(x))))
x = self.global_pool(x)
x = x.view(x.size(0), -1) # 展平
x = self.fc(x)
return x
# 模型实例化与测试
model = RoboticVisionNet()
dummy_input = torch.randn(1, 3, 128, 128)
output = model(dummy_input)
print(f"Network Output Shape: {output.shape}")3.2 传感器与深度学习结合:物体识别与环境建模
单一传感器存在物理局限:摄像头受光照影响,激光雷达(LiDAR)缺乏纹理信息。因此,多模态融合(Multi-modal Sensor Fusion)是前沿方向。
- 数据级融合:直接融合RGB图像像素和LiDAR点云投影。
- 特征级融合:分别提取特征向量后拼接。
在环境建模方面,SLAM(同步定位与建图)技术至关重要。传统的ORB-SLAM基于几何特征,而Learning-based SLAM(如DeepSLAM)利用深度学习解决闭环检测(Loop Closure)和特征匹配在动态环境下的鲁棒性问题。
3.3 强化学习在机器人控制中的应用:自主决策与优化
强化学习(RL)让机器人具备了"自学成才"的能力。
核心数学模型是马尔可夫决策过程(MDP):
Vπ(s)=Eπ∑k=0∞γkrt+k+1∣St=sV^\pi(s) = \mathbb{E}_\pi \left \\sum_{k=0}\^\\infty \\gamma\^k r_{t+k+1} \| S_t = s \\rightVπ(s)=Eπk=0∑∞γkrt+k+1∣St=s
在机器人连续动作控制中,常用算法包括:
- DDPG (Deep Deterministic Policy Gradient):适用于机械臂的连续力矩控制。
- PPO (Proximal Policy Optimization):OpenAI主推的算法,稳定性更好。
应用场景:比如让一个四足机器人(机器狗)学会走路。传统的控制方法需要复杂的动力学建模(ZMP算法),而RL可以让机器人在仿真环境中通过数百万次跌倒,自动学会平衡策略。
4. 机器人与AI的协作
4.1 工业自动化:机器人在制造业中的应用
AI赋能的工业机器人不再关在笼子里,而是进化为协作机器人(Cobots)。
- 视觉引导抓取:对于乱序堆放的零件(Bin Picking),AI结合3D视觉,计算最佳抓取点,避开箱壁碰撞。
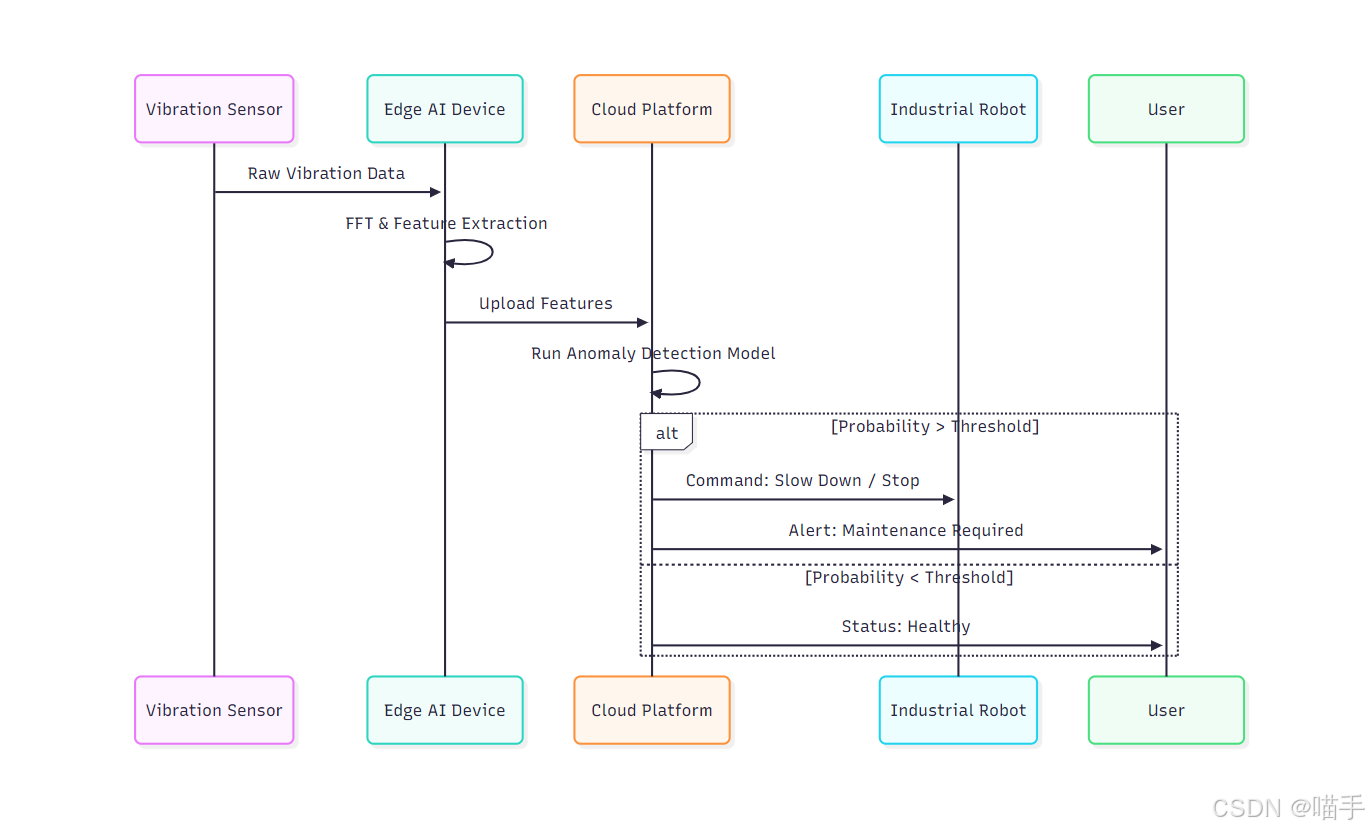
- 预测性维护(Predictive Maintenance):利用LSTM或RNN分析机器人关节的电流和振动数据,预测减速机何时会损坏,从而避免意外停机。
4.2 无人驾驶与自主车辆:如何通过AI实现全自动驾驶
自动驾驶是移动机器人技术的集大成者。其技术栈分为:
- 感知层:PointPillars处理点云,ResNet处理图像,实现3D目标检测。
- 预测层:预测行人和其他车辆的未来轨迹(Trajectory Prediction)。
- 规划层:路径规划(A*,Hybrid A*)与行为规划(状态机)。
- 控制层:MPC(模型预测控制)实现车辆的横纵向控制。
代码示例:简单的A*路径规划算法片段
这是自主移动机器人(AMR)导航的基础。
示例代码如下:
python
import heapq
class Node:
def __init__(self, position, parent=None):
self.position = position
self.parent = parent
self.g = 0 # Cost from start
self.h = 0 # Heuristic to end
self.f = 0 # Total cost
def __lt__(self, other):
return self.f < other.f
def astar(maze, start, end):
start_node = Node(start)
end_node = Node(end)
open_list = []
closed_list = set()
heapq.heappush(open_list, start_node)
while open_list:
current_node = heapq.heappop(open_list)
closed_list.add(current_node.position)
# Goal Reached
if current_node.position == end_node.position:
path = []
while current_node:
path.append(current_node.position)
current_node = current_node.parent
return path[::-1]
# Generate Children (Neighbors)
(x, y) = current_node.position
neighbors = [(x-1, y), (x+1, y), (x, y-1), (x, y+1)] # 4-connectivity
for next_pos in neighbors:
# Check bounds and walls
if (next_pos[0] < 0 or next_pos[0] >= len(maze) or
next_pos[1] < 0 or next_pos[1] >= len(maze[0]) or
maze[next_pos[0]][next_pos[1]] != 0):
continue
if next_pos in closed_list:
continue
neighbor = Node(next_pos, current_node)
neighbor.g = current_node.g + 1
# Manhattan Distance Heuristic
neighbor.h = abs(neighbor.position[0] - end_node.position[0]) + \
abs(neighbor.position[1] - end_node.position[1])
neighbor.f = neighbor.g + neighbor.h
# Check if this path is better than any existing path in open_list
# (Simplified for brevity, usually need to check open_list contents)
heapq.heappush(open_list, neighbor)
return None # No path found4.3 智能家居与服务机器人:AI赋能家庭与日常服务
结合LLM(大语言模型)的服务机器人是最新热点。
- 任务拆解 :用户指令"我渴了",传统的机器人无法理解。而集成GPT-4的机器人可以将指令拆解为:
[定位用户] -> [导航至厨房] -> [识别冰箱] -> [打开冰箱] -> [抓取水瓶] -> [导航回用户] -> [递送]。 - 情感计算:通过面部表情识别与语音语调分析,陪伴机器人能对老年人提供情感支持。
5. AI驱动的机器人挑战
5.1 感知与理解的局限性:如何应对复杂的、动态的环境
AI模型存在长尾效应(Long-tail Problem) 。训练数据中未出现的罕见场景(Corner Cases)往往导致系统失效。例如,自动驾驶汽车遇到路面上从未见过的异形障碍物。
此外,对抗攻击(Adversarial Attacks)也是巨大隐患。仅需在交通标志上贴几个特殊的贴纸,就能欺骗AI将"停车"识别为"限速"。
5.2 机器人与人类的互动:安全性与伦理问题
- 安全性:ISO 10218和ISO/TS 15066规定了协作机器人的安全标准。AI算法的"黑盒"特性使得安全认证变得极其困难(不可解释性)。
- 伦理:著名的"电车难题"在自动驾驶中变为现实。当事故不可避免时,AI应该优先保护车内乘客还是路人?这不仅是技术问题,更是法律与道德问题。
5.3 系统可靠性与容错设计
为了确保稳定运行,机器人系统必须具备冗余设计。
- 传感器冗余:摄像头失效时,雷达必须接管。
- 算法冗余:AI算法失效时,系统应回退(Fallback)到基于规则的传统控制算法,进行安全降级(Fail-safe)。
6. 未来展望
6.1 跨领域机器人:AI如何在医疗、教育、环境保护等领域应用
- 医疗机器人:达芬奇手术机器人结合AI,可以实现"远程手术"的延迟补偿,甚至实现自动缝合。微型纳米机器人(Nanorobots)有望进入血管进行靶向给药。
- 农业机器人:基于计算机视觉的除草机器人,能够精准识别杂草并利用激光铲除,减少农药使用。
6.2 自适应与自主学习:如何使机器人不断进化和自我优化
未来的方向是终身学习(Lifelong Learning) 。机器人不应在出厂后就停止学习,而应在使用过程中不断积累经验,更新模型,同时避免"灾难性遗忘"(Catastrophic Forgetting)。
Sim2Real(仿真到现实)技术将进一步发展。通过域随机化(Domain Randomization),在仿真中构建无数个光照、纹理、物理参数不同的虚拟环境,训练出的策略能直接迁移到现实世界。
6.3 人工智能与机器人融合的社会影响
- 就业结构重塑:重复性、危险性工作将被替代,但会产生对"机器人维护师"、"AI训练师"等新职位的需求。
- 法律责任:当完全自主的机器人造成损害时,责任主体是制造商、程序员还是用户?法律框架亟待更新。
7. 结论 (Conclusion)
AI与机器人技术的融合正处于爆发的前夜。从感知的智能化到决策的自主化,AI正在重塑机器人的灵魂。尽管面临着算法鲁棒性、安全伦理及法律法规等多重挑战,但随着深度强化学习、多模态大模型及边缘计算技术的进步,一个"人机共融"的智能社会终将到来。对于工程师和研究者而言,掌握跨学科的知识体系,理解从底层控制到上层AI的完整技术栈,将是应对未来挑战的关键。